

2.6. Визначення узагальнених показників
Розрахунок узагальнених показників, включаючи і техніко-економічні, є однією з найбільш поширених задач АСК, вирішення якої, в свою чергу, потребує розв’язання таких підзадач:
інтегрування і усереднення поточних значень вимірюваних величин;
визначення невимірюваної величини, включаючи і техніко-економічні показники (ТЕП), що пов’язані аналітичною або регресійною залежністю з декількома вимірюваними величинами.
2.6.1. Інтегрування та усереднення поточних значень вимірюваних величин
Задача дискретного інтегрування безперервно змінюваної за часом вимірюваної величини виникає в разі необхідності визначити сумарну кі-лькість речовини або (та) енергії, які вносять або отримують на вироб-ництві за певний інтервал часу (наприклад, витрати електроенергії, па-лива, різних речовин за годину, зміну, добу).
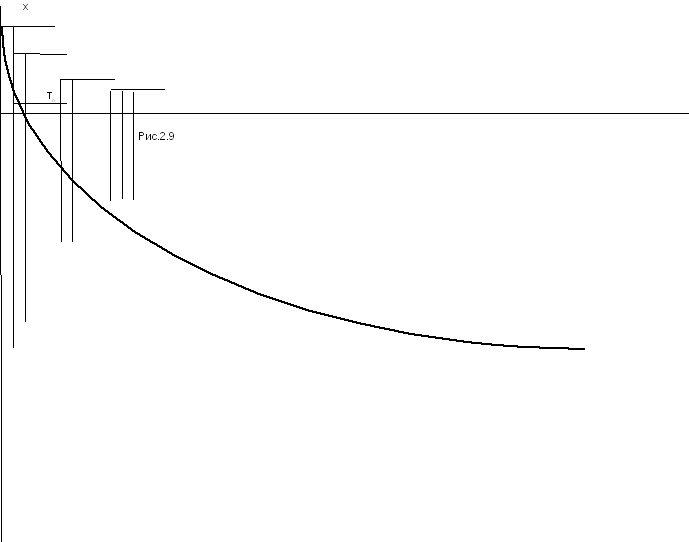
Дійсне значення сумарної кількості речовини або енергії Sx за інте-рвал часу Т характеризується площею, обмеженою кривою x(t) зміни витрати цієї речовини або енергії
Т
Sx(T) = ò x(t) dt. (2.62)
0
Звідси середнє значення
xсер = Sx/T. (2.63)
Найпростіший метод дискретного інтегрування – це метод прямо-кутників (рис. 2.9), що полягає у визначенні площі прямокутників (з постійним розміром одного боку То), які розміщені на площі інтегрування
n-1
Sx^(kTo) = To å x(kTo). (2.64)
k=0
Безпосереднє використання формули (2.64) для дискретного інтегрування в
ЕОМ нераціональне, оскільки при цьо-му треба зберігати n значень x в па-м’яті машини. Тому застосовують ре-курентну формулу (reccurens - лат., той, що повертається) з розрахунком площі на кожному кроці площі за фор-
мулою

Sx^(kTo) = Sx^[(k–1)To] + To×x(kTo), (2.65)
при Sx^(0) ¹ 0, n – 1 ³ k ³ 0. Це простий метод, однак він застосовується тільки при немалих n, оскільки він не враховує останнє значення орди-нати, що при малих n приводить до значних похибок. Значно менша по-хибка дискретного інтегрування у разі застосування методу трапецій, при використанні якого розраховується площа трапецій. Водночас же час метод трапецій потребує більших витрат пам’яті. Рекурентна формула розрахунку площі за цим методом має такий вигляд:
Sx^(kTo) =Sx^[(k–1)To] + 0,5To{x(kTo)+ x[(k–1)To]}, (2.66) при Sx^(0) = 0; n ³ k ³ 1. Дискретне усереднене значення знаходять за формулою:
xсер = Sx^/ kTo.
У контролерах типу «реміконт-ломіконт» для інтегрування і усеред-нення використовують такі стандартні алгоритми: ИНТ(бібліотечний но-мер – 33) і ДИС (50) – в РМК, ИНТ(22) і ДСР(29) – в РСВК, ИНТ(012) – в ломіконтах.