

3.4.2. Системи автоматизації виробничого потоку
Алгоритми керування виробничим потоком. Виділяють чотири класи таких алгоритмів і відповідно систем АВП рідинних продуктів:
1) алгоритми оперативного керування продуктивністю ТК і запасами в БЗ, що оптимізують певні техніко-економічні показники виробництва. У математичній моделі такої задачі використовують лінійний опис стаціо-нарного режиму роботи ТК і рівняння (4.45). Такі АСУ працюють у режимі «порадника» і дозволяють оператору-технологу враховувати усю сукуп-ність виробничих ситуацій і формувати з дискретністю 1 год і більше ке-рувальні дії, які змінюють запаси в БЗ. Найбільш ефективні такі алгори-тми при наявності дуже великих БЗ (Тпер > 90 хв) у поєднанні з алгорит-мами другого класу - алгоритмами стабілізації виробничого потоку;
2) алгоритми стабілізації виробничого потоку з використанням регуля-торів витрати, відповідні системи яких іноді називають системами авто-матизованого управління запасами з метою «гнучкої» динамічної синхро-
нізації продуктивності ТК, що розділені БЗ. Найбільш ефективні такі сис-теми за умов наявності великих БЗ з Тпер = 30... 90 хв;
3) алгоритми усереднювального регулювання рівня (УРР) у каскаді БЗ, коли за рахунок запасів або вільних просторів цих збірників демпфі-рується коливання технологічного потоку. Найбільш ефективні відповідні системи АВП в каскаді середніх БЗ, тобто при Тпер = 10... 30 хв;
4) алгоритми точного регулювання рівня (ТРР) в БЗ, коли він, урахо-вуючи малий об’єм (Тпер < 10 хв), не в змозі виконувати роль демпфера збурень виробничого потоку і тому рівень в БЗ стабілізується для того, щоб забезпечити нормальні умови роботи насоса і запобігти перепов-ненню збірника.
Для порівняльної оцінки перелічених алгоритмів може бути вико-ристаний коефіцієнт вирівнювання потоку K (3.44) або один чи кілька ін-ших показників ефективності демпферування збурень потоку:
відношення амплитуд коливання QВ (t) до амплитуди коливань QП(t);
оцінка швидкості коливань QВ (t) віднесена до 20АП, де АП – амп-литуда коливань QП(t);
ефективність використання буфера Dh/ (hmax – hmin), де Dh – діапазон поточних змін рівня; hmax , hmin – граничні значення рівня;
частота входу рівня у передаварійну зону hmin+0,075(hmax–hmin)... hmax – 0,075(hmax – hmin).
Усереднювальне регулювання рівня (УРР) відрізняється від то-чного регулювання рівня (ТРР) тим, що статична похибка першого зна-чно більша і повинна дорівнювати можливій зміні рівня за висотою БЗ, тому і при УРР і при ТРР для регулювання рівня застосовують П-ре-гулятор, який в системах УРР має малий коефіцієнт передачі kр і велику статичну похибку, а в системах ТРР великий kр і малу статичну похибку. Якщо УРР застосовують в БЗ для автоматизації виробничого потоку, то ТРР використовують в апаратах, які повинні працювати при стабільних значеннях рівня рідини в них, або в малих БЗ (Тпер < 10 хв) для за без-печення норма-льного функціонування насосу.
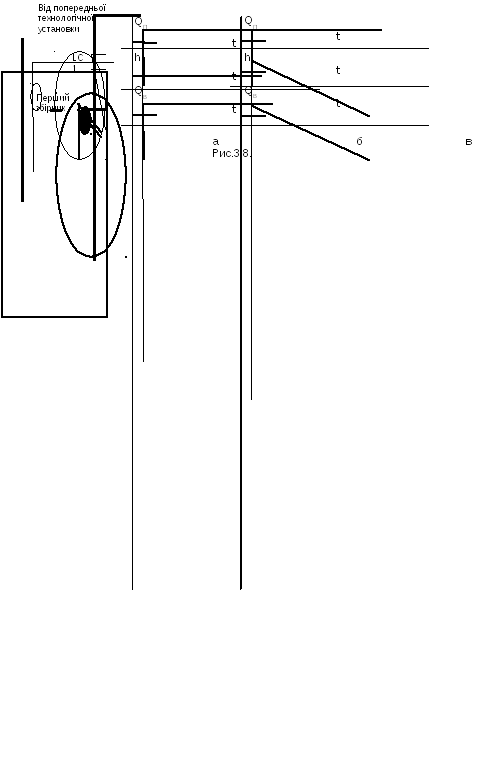
На рис. 3.8 наведена схема регулювання рівня в БЗ дією на виток зі збірника (рис. 3.8,а) і графіки перехідних процесів у разі ТРР (рис. 3.8,б) і УРР (рис. 3.8,в). Як видно з графіків, при ТРР рівень при стрибкоподі-бній зміні витрати на вході до БЗ залишається практично постійним і зміна витоку фактично повторює зміну витрати на вході. При УРР рівень плавно змінюється в широких межах і за рахунок цього поступово змі-нюється виток.
Побудова систем УРР залежить, насамперед, від того, чи має каскад буферних збірників детектувальні властивості в поширенні збурень, то-бто коли збурення поширюються тільки за ходом технологічного процесу. В цьому випадку система УРР складається з П-регуляторів рівня буфе-рних збірників, які діють на виток рідини із збірника. Значення коефіці-єнта передачі П-регулятора вибирають таким, щоб збірник був повним при максимальній витраті і майже порожнім при мінімальній.
При недектувальних властивостях каскаду, тобто коли збурення по-ширюються як за ходом технологічного потоку, так і проти його ходу, ре-гулювання рівня дією тільки на виток не дає демпфірування збурень, що пощирюються проти потоку. Дійсно, якщо наступний ТК зменшив свою продуктивність і рівень у збірнику почав збільшуватися, то дія регулятора на збільшення відкриття клапана на витоку зі збірника не приведе до зменшення рівня. В цьому випадку застосовують зв'язане регулювання рівня в двух суміжних збірниках. Існують три варіанти реалізації такого регулювання:
1) з множенням сигналів датчиків рівня у двох суміжних БЗ і реаліза-цією такого регулятора:
u = kр h1 (1 – h2),
де h1 – заповнена частина 1-го збірника (1 – h2) – назаповнена частина 2-го збірника;
2) з двома регуляторами рівня, з’єднаних за каскадним принципом, коли завдання регулятору рівня 1-го збірника коригується залежно від (1 – h2);
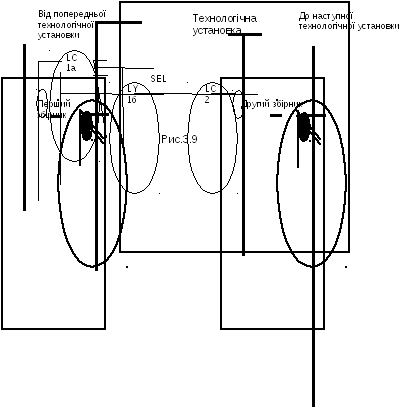
3) з селектуванням сигналів двох регуляторів рівня – найбільш по-ширений варіант, схема якого наведена на рис.3.9. Пристрій для селек-тування LY пропускає на виконавчий механізм (ВМ) з регулювальним органом (РО), що розташований між збірниками, найбільший з вихідних сигналів двох регуляторів рівня LC, причому на виході регулятора пе-ршого збірника сигнал є пропорційним заповненій частині збірника, а на виході регулятора другого збірника – порожній частині збірника.
Можна виділити дві переваги систем з УРР:
відносно проста апаратурна реалізація, що не потребує виміру витрат,
можливість реалізації при середньому об’ємі БЗ.
Недоліком таких систем є неповна локалізація збурень потоку в ме-жах однієї дільниці. Цього недоліку не мають алгоритми іншого тиру, які стабілізують виробничий потік з використанням регуляторів витрати.
Стабілізація виробничого потоку. Ці системи дають можливість локалізувати збурення потоку в межах окремої дільниці, однак вони скла-дніші, насамперед, через необхідность мати захист від аварійної ситуації переповнення або випорожнення збірників і мають відносно велику вар-тість через необхідность вимірювати витрату, як правило, неоднорідного середовища. Схема реалізації одного з варіантів такої системи наведена на рис. 3.10.
Якщо рівень у обох БЗ знаходиться у середній зоні витрата продукта стабілізується контуром поз.2, до якого входить датчик витратоміра (2а) та регулятор (2б). Завдання регулятору поз.2б встановлює система ви-щого рівня керування або оператор ручним задавальником в результаті розв’язання задачі оперативного керування продуктивністю ТК і запа-сами в БЗ (алгоритми АВП першого класу). Крім того, для компенсації похибки задавальних пристроїв ще додатково вводиться сигнал від ре-гулятора рівня (поз.1а), що дорівнює (0,1....0,3)Dh1 і повинен за безпе-чити однакову витрату продукта на всіх виробничих дільницях.
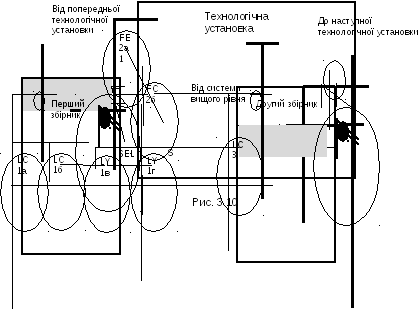
У разі збільшення рівня у 2-му збірнику вище Н2огр або зменшення рівня у 1-му збірнику нижче Н1огр починають працювати регулятори поз. 1б і 3, причому більший із сигналів через блок селектування (1в) і суматор (1г) зменшує завдання регулятору витрати (можливо до 0), щоб запобігти спорожненню 1-го і переповненню 2-го збірника.
У розглянутих системах автоматизації виробничого потоку рідинних продуктів використано один з найбільш поширених способів зміни вит-рати зміною опору трубопроводу переміщенням регулювального дросе-льного органа (РДО). Його перевагою є простота реалізації, однак при цьому виникають додаткові втрати енергії потоку. Крім того, його засто-сування можливе тільки при використанні відцентрових насосів. Для по-ршневих, лопатевих та шестерінчастих насосів, які працюють зі сталою витратою, РДО встановлюють на всмоктувальній лінії (див. рис. 3.10, насос після другого збірника). Для відцентрових насосів такий варіант не застосовують, тому що при дроселюванні потоку на всмоктувальній лінії можливе суттєве зниження тиску рідини перед насосом і, як наслідок, виникнення кавітації.
Витрати рідинних продуктів можна змінювати, також зміною продук-тивність насоса за рахунок швидкості обертання його робочого вала. При використанні асинхроних електродвигунів змінного струму найбільш ефективним при цьому є застосування частотних перетворювачів, які випускають такі фірми-виробники контролерів як «Schneider Elektric», «Mitsubishi Elektric», «Omron» та інші. Для регулювання потоку рідинних продуктів у цьому випадку використовують каскадну АСР, в якій головним регулятором є регулятор рівня або витрати, а допоміжним – регулятор швидкості обертання робочого вала електродвигуна. Перева-гою цього способу є відсутність втрат енергії потоку через його дросе-лювання, недоліком – ускладнення системи автоматизації. Остаточний висновок щодо застосування того чи іншого способу зміни витрати роблять на основі порівнювального економічного аналізу.