

6.2.5. Двигатель постоянного тока с параллельным возбуждением
Пуск двигателя.
Внутреннее сопротивление якоря машины
невелико. У двигателей средней и
большой мощности оно имеет величину
порядка десятых-сотых долей Ома. При
прямом включении двигателя в сеть
пусковой ток IЯ.П
=![]() (14) достигает
(10-30)IН.
(14) достигает
(10-30)IН.
Поэтому прямой пуск двигателя недопустим. Такой большой пусковой ток опасен для двигателя и сети, напряжение в сети может значительно снизиться, кроме того, возникнет толчок момента, действующего на передачу и рабочий механизм.
Для ограничения силы
пускового тока последовательно с
обмоткой якоря включают пусковой
реостат rП
(рис.27). Тогда токIЯ.П
=![]() (15)
(15)
Сопротивление пускового реостата выбирают таким образом, чтобы сила пускового тока не превышала кратковременно допустимого номинального значения силы тока якоря (2-2,5) IЯ. По мере увеличения частоты вращения двигателя растет противодействующая ЭДС якоря, которая направлена против подведенного напряжения, и ток снижается, поэтому сопротивление пускового реостата постепенно уменьшают до нуля. Пусковой реостат включается на 2-3 секунды и не рассчитан на длительное протекание тока. Двигатели мощностью до 1 кВт имеют сравнительно большое сопротивление якоря, поэтому их включают без пусковых реостатов.
При номинальной частоте
вращения двигателя имеемIЯ=![]() (16)
(16)
Для определения частоты
вращения двигателя подставим в
формулу (16) значение ЭДС из формулы (6),
получимIЯ=![]() ,откуда
n
=
,откуда
n
=![]() (17)
(17)
Уравнение (17) п = f(IЯ) носит название скоростной характеристики и указывает на то, что частота вращения двигателя прямо пропорциональна подведенному напряжению и обратно пропорциональна магнитному потоку.
При пуске двигателя регулировочный реостат в цепи возбуждения полностью выводится, чтобы обеспечить максимальное значение силы тока в цепи возбуждения и магнитного потока статора. Из формулы (17) видно, что при большом пусковом токе в якоре уменьшается числитель, а при большом токе в цепи возбуждения увеличивается знаменатель, что обеспечивает плавный пуск двигателя при достаточном вращающем моменте якоря для преодоления механического сопротивления.
На практике пользуются
зависимостью п=f(М),
называемой механической
характеристикой. Подставим
в уравнение (17) значение момента
двигателя (10) М =
СмФ
IЯ,
в результате чего получимп=
![]() —
—![]() (18)
(18)
Полученное уравнение является уравнением механической характеристики, связывающим зависимость установившейся частоты вращения двигателя от момента при постоянном напряжении сети и сопротивлении цепи якоря.
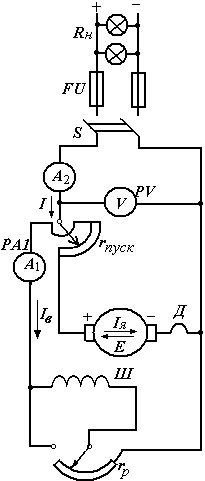 Рис.
27. Схема двигателя
постоянного
тока с параллельным
возбуждением
Рис.
27. Схема двигателя
постоянного
тока с параллельным
возбуждением
В двигателях параллельного
и независимого возбуждения поток Ф
практически постоянный, поэтому
механическая характеристика представляется
уравнением прямой (рис. 28), слегка
наклоненной к оси абсцисс. В выражении
(18) первое слагаемое уравнения
![]() носит название частоты идеального
холостого хода и обозначается n0
, второе слагаемое
носит название частоты идеального
холостого хода и обозначается n0
, второе слагаемое
![]() - потери частоты вращения двигателя
под нагрузкой ∆n.
Тогда уравнение
механической характеристики двигателя
можно записать так: п
= п0
- ∆n.
Изменение частоты
вращения двигателя при номинальной
нагрузке составляет (3-8) % п0.
Такая механическая
характеристика считается жесткой.
- потери частоты вращения двигателя
под нагрузкой ∆n.
Тогда уравнение
механической характеристики двигателя
можно записать так: п
= п0
- ∆n.
Изменение частоты
вращения двигателя при номинальной
нагрузке составляет (3-8) % п0.
Такая механическая
характеристика считается жесткой.
Регулирование частоты вращения двигателя с параллельным возбуждением. Рассмотрим способы регулирования частоты вращения двигателя при неизменном тормозном моменте на валу.
Из уравнения механической характеристики (18) видно, что изменение п возможно при регулировании напряжения питания U, потока возбуждения Ф и величины сопротивления цепи якоря rЯ , CЕ и СМ - конструктивные коэффициенты, изменить которые мы не можем.
Регулирование частоты вращения изменением приложенного напряжения не применяется, так как с изменением силы тока изменяется и магнитный поток машины, а при малых напряжениях можно размагнитить машину.
А) Регулирование «на уменьшение потока» (полюсное регулирование)
Из формулы п0
=
![]() следует, чточастота вращения идеального
холостого хода обратно пропорциональна
потоку. Пока магнитная система машины
не насыщена, поток можно считать
пропорциональным силе тока возбуждения
IВ.
Следовательно, частоту вращения
двигателя можно регулировать изменением
силы тока возбуждения, для чего в цепь
возбуждения вводится реостат (рис.
27). С увеличением сопротивления rВ
уменьшается сила
тока возбуждения IВ,
вследствие чего уменьшается поток Ф.
Уменьшение потока возбуждения ведет
к увеличению частоты вращения идеального
холостого хода
п0.
Потери частоты
вращения ∆n
будут обратно пропорциональны квадрату
магнитного потока.
следует, чточастота вращения идеального
холостого хода обратно пропорциональна
потоку. Пока магнитная система машины
не насыщена, поток можно считать
пропорциональным силе тока возбуждения
IВ.
Следовательно, частоту вращения
двигателя можно регулировать изменением
силы тока возбуждения, для чего в цепь
возбуждения вводится реостат (рис.
27). С увеличением сопротивления rВ
уменьшается сила
тока возбуждения IВ,
вследствие чего уменьшается поток Ф.
Уменьшение потока возбуждения ведет
к увеличению частоты вращения идеального
холостого хода
п0.
Потери частоты
вращения ∆n
будут обратно пропорциональны квадрату
магнитного потока.
Таким образом, изменением потока возбуждения можно регулировать частоту вращения двигателя. На рис. 29 приведены искусственные механические характеристики. При значительном уменьшении силы тока возбуждения (особенно при обрыве цепи возбуждения) силы тока якоря и частота вращения ненагруженного двигателя сильно возрастают, что может привести к опасным механическим повреждениям. Это явление недопустимо, поэтому двигатель должен быть снабжен автоматической защитой, отключающей его от сети при предельном уменьшении потока (ниже '/3ФН).
Регулирование «на уменьшение потока», называемое еще полюсным регулированием, весьма распространено, так как оно экономично и удобно в связи с тем, что сила тока возбуждения мала и мощность потерь в реостате мала.
Б) Реостатное регулирование.
При этом способе регулирования, при
Ф=const,
последовательно с якорем включается
регулировочный реостат. Уравнение
механической характеристики имеет
вид: п=
![]() —
—![]() (19)
(19)
Анализ уравнения (19) показывает, что при изменении rР изменяется только ∆n, т. е. увеличивается наклон механической характеристики (рис.30). Изменяя rР, увеличивая его, можно получить семейство механических характеристик, более мягких, чем естественная механическая характеристика с частотой вращения п1, п2 и п3. У всех этих характеристик общая точка п0 - частота вращения идеального холостого хода двигателя. Такое регулирование неэкономично, так как через регулировочный реостат проходит весь ток якоря IЯ, а это обусловливает значительные потери мощности ∆Р = rР I2.
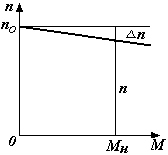
Рис. 28. Механическая характеристика двигателя с параллельным возбуждением
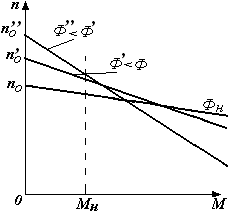
Рис. 29.Искусственные механические характеристики двигателя
Реверсирование двигателей постоянного тока. Под реверсированием понимают изменение направления вращения якоря двигателя.
Если изменить направление магнитного потока или тока якоря, то знак, а значит, и направление вращения двигателя изменятся. Однако одновременное изменение направления потока и тока якоря к изменению знака вращающего момента не приводит. Практически реверсирование осуществляется переключением выводов обмотки якоря или обмотки возбуждения.
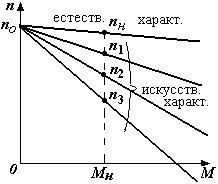 Рис. 30. Механические
характеристики реостатного регулирования
Рис. 30. Механические
характеристики реостатного регулирования