


 MTC
MTC
Anchor Handling Course
Electrical winches
The winches mentioned are based on A-type winches.
The winches are of waterfall type.
Electrical winches are driven via shaft generator or harbour generators through main switchboard to electronic panel to DC motors.
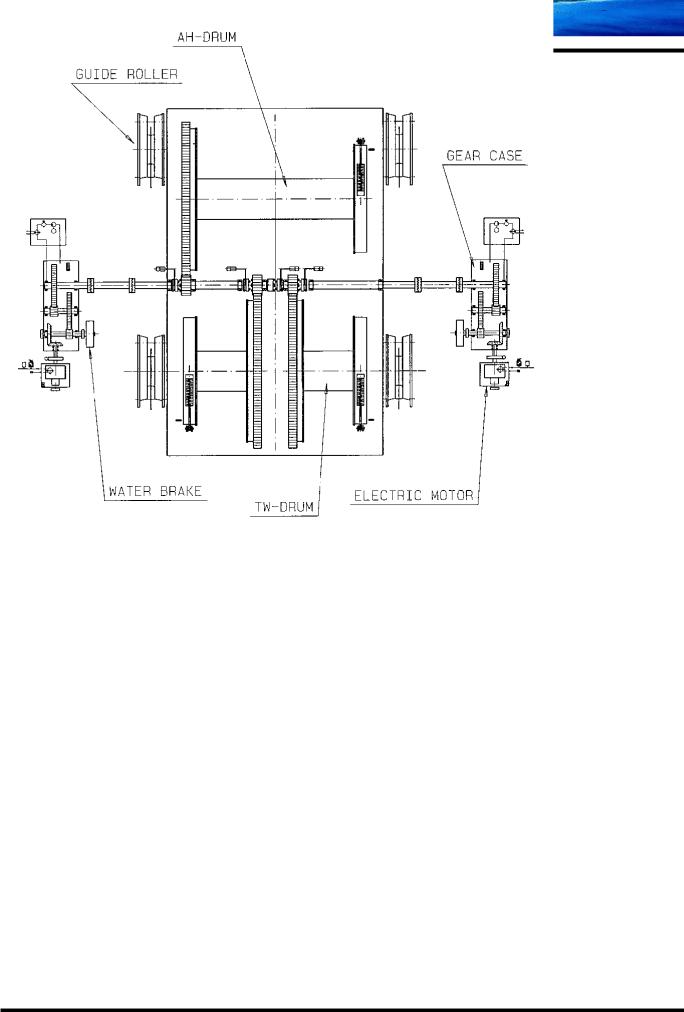
The winch lay out is with anchor handling drum on top and 2 towing winches underneath and forward of the A/H winch. The towing winches each has a chain wheel interchangeable according to required size.
The winch has 4 electrical motors. The motors can be utilised with either 2 motors or all 4 motors for the AH drum depending on required tension or with one or two motors for the towing drums. The coupling of motors is via clutches and pinion drive.
The clutching and de-clutching of drums is done with hydraulic clutches driven by a power pack. This power pack is also used for the brake system on the drums, as the band brake is always
“on” when the handle is not activated.
Apart from the band brake there is also a water brake for each electric motor as well as a disc brake. The disc brake is positioned between the electric motor and the gearbox. The water brake is connected to the gearbox and within normal working range, 50% of the brake force is from the water brake and 50% from the electric motor brake.
The drums are driven via pinion shafts clutch able to pinion drives on the drums. Pinion drives are lubricated continuously by a central lubricating system to ensure a good lubrication throughout the service. The control handle for the winch activates the lubrication system, and only the active pinions are lubricated.
Each winch also has a “spooling device” to ensure a proper and equal spooling of wire on the drum. The spooling device is operated by means of a hydraulic system supplied from the same power pack as mentioned above.
Finally, separating the winch area and the main deck is the “crucifix” which divides the work wires in compartments for each winch. It is also part of the winch garage construction.
M:\ANCHOR HANDLING\Course Material\Training Manual New\Chapter 05\AHT winches.doc
Chapter 05 |
Page 1 |

 MTC
MTC
Anchor Handling Course
Winch operation
The winches are operated from the aft desks in port side, but can also be operated at the winch. When operated locally from the winch only ½ speed can be obtained. There are different bridge lay outs but they are all to some degree based on previous design and partly identical.
To ensure a good overview for the operator a SCADA system has been installed showing the winch status. Further there is a clutch panel allowing the operator to clutch drums in and out according to requirement. On the panel lub oil pumps for gearboxes, pumps for hydraulic system and grease pump for gearwheels are started.
Winch configuration and adjustment is done on the panel, which here at Maersk Training Centre is illustrated by a “touch screen” monitor. The different settings can be done on the “touch screen”.
Normally the winch drums are not visible from the bridge. Instead the drums are monitored via different selectable cameras installed in the winch garage. These are connected to monitors on the aft bridge allowing the operator and the navigator to monitor the drums.
M:\ANCHOR HANDLING\Course Material\Training Manual New\Chapter 05\AHT winches.doc
Chapter 05 |
Page 2 |
 MTC
MTC
Anchor Handling Course
General Arrangement
M:\ANCHOR HANDLING\Course Material\Training Manual New\Chapter 05\AHT winches.doc
Chapter 05 |
Page 3 |

 MTC
MTC
Anchor Handling Course
A/H-Drum at full Capacity
M:\ANCHOR HANDLING\Course Material\Training Manual New\Chapter 05\AHT winches.doc
Chapter 05 |
Page 4 |

 MTC
MTC
Anchor Handling Course
SCADA: Supervisory Control and Data Acquisition
This system gives the operator an overview of the winch status as well as a warning/alarm if anything is about to go wrong or already has gone wrong. The system is PLC governed –
“Watchdog”.
3 types of alarms are shown: |
|
Alarm: |
A functional error in the system leads to stop of winch. |
Pre alarm: |
The winch is still operational but an error has occurred, |
|
which can lead to a winch stop/failure if the operation |
|
continues in same mode. |
Warning: |
Operator fault/wrong or illegal operation |
The clutch panel
On the clutch panel the different modes of operation can be chosen. In order to clutch all functions must be “off”. It is not possible to clutch if the drum is rotating or a motor is running. Change of “operation mode” can not be done during operation.
Speed control mode
Motors can be operated with the handle in:
Manual clutch control.
If no drum is clutched in.
When drums have been chosen.
Tension |
|
Static wire tension: |
The pull in wire/chain is measured from the braking load. The drum is |
|
not rotating and the band brake is “ON”. The pull is calculated from |
|
“strain gauges”. |
Dynamic wire tension: |
The pull in the wire/chain is measured from the actual torque in the |
|
motor. The drum is rotating or almost stopped but not braked. |
Max wire tension: |
Highest possible pull in the wire/chain that can be handled by the motor |
|
converted from static pull to dynamic pull. |
M:\ANCHOR HANDLING\Course Material\Training Manual New\Chapter 05\AHT winches.doc
Chapter 05 |
Page 5 |