

Вектори кутової швидкості і кутового прискорення.
Раніше
було
з’ясовано, що елементарне кутове
зміщення
![]() можна розглядати як векторну величину.
можна розглядати як векторну величину.
Вектор
елементарного кутового зміщення
![]() є напрямлений відрізок, що чисельно
дорівнює куту поворота, напрямлений по
осі обертання в сторону, яка вказуються
правилом правого гвинта. Як відомо, за
цим правилом напрям вектора повинен
збігатись з поступальним рухом гвинта,
якщо його, ручку повертати за напрямом
обертання.
є напрямлений відрізок, що чисельно
дорівнює куту поворота, напрямлений по
осі обертання в сторону, яка вказуються
правилом правого гвинта. Як відомо, за
цим правилом напрям вектора повинен
збігатись з поступальним рухом гвинта,
якщо його, ручку повертати за напрямом
обертання.
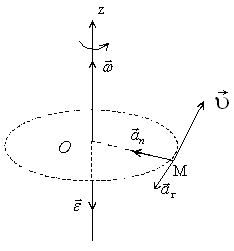
Таким чином, кутова швидкість і кутове прискорення – вектори, напрямлені по осі обертання.
Кутова швидкість – векторна фізична величина, що характеризує бистроту і напрям обертання.
Кутова швидкість – вектор, напрямлений вздовж осі обертання таким чином, щоб з його кінця було видно обертання, що здійснюється проти годинникової стрілки (правило правого гвинта).
Кутове прискорення – це вектор, що збігається з напрямом кутової швидкості при прискореному русі, або напрямлений проти кутової швидкості при сповільненому русі.
![]() ,
,
![]()
На
відміну від розглянутих векторів
![]() ,
напрями, яких очевидні, вважаються
істинними векторами; вектори
,
напрями, яких очевидні, вважаються
істинними векторами; вектори![]() і
і![]() називаються псевдовекторами (рис. 1.12).
називаються псевдовекторами (рис. 1.12).
|
|
|
|
Прискорене обертання |
Сповільнене обертання |
|
Рис. 1.12. | |

Зв’язок лінійних і кутових величин
Рух
тіла (точки) по колу зручно описувати
сукупністю двох типів параметрів, що
називаються лінійним:
![]() і кутовими:
і кутовими:![]() .
.
Встановимо зв’язок між ними.
Так
як
![]() ,
то взявши похідну за часом:
,
то взявши похідну за часом: ;
; ;
;
![]() (1-18)
(1-18)

![]() ;
;
![]() (1-19)
(1-19)

![]() (1-20)
(1-20)
Рівняння рівномірного і рівнозмінного руху точки по колу.
а) Рівномірний рух по колу – це обертання точки з постійною кутовою швидкістю, або рух з постійним за модулем вектором лінійної швидкості:
![]() ;
;
![]()
Виходячи з початкових умов, встановимо межі інтегрування:
При
![]() ;
;
![]() ;
;
![]() ;
;
при
![]() ;
;
![]()
Тоді:
 ;
;
 ;
;
Інтегруючи, дістанемо закон рівномірного обертання:
![]() ;
;
![]() (1-21)
(1-21)
аналогія:
![]() з прямолінійним рівномірним рухом якщо:
з прямолінійним рівномірним рухом якщо:
![]() ;
;
 ;
;![]() ;
;![]()
Рівномірне обертання точки характеризується тільки однією складовою вектора прискорення – нормальним прискоренням.
б) Рівнозмінний рух по колу – це обертання точки з постійним кутовим прискоренням:
![]() –прискорення;
–прискорення;
![]() –сповільнення.
–сповільнення.
Тоді:
Проводячи інтегрування дістанемо формулу кутової швидкості
 ;
;
![]() ;
;
![]() (1-22)
(1-22)
аналогія:
![]() з прямолінійним рівнозмінним рухом
з прямолінійним рівнозмінним рухом

 ;
;
Проводячи інтегрування, отримаємо, закон рівнозмінного обертання.
 ;
;
 (1-23)
(1-23)
аналогія:
 з прямолінійним рівнозмінним рухом.
з прямолінійним рівнозмінним рухом.
Практичне заняття 1.1 Тема: Кінематика прямолінійного руху матеріальної точки. Основні формули та методичні рекомендації
1. Кінематичні рівняння найпростіших механічних рухів матеріальної точки:
![]() ,
,
![]()
 ,
,
![]() .
.
2. Швидкість та прискорення прямолінійного руху матеріальної точки виражаються формулами:
3.
Ортогональні проекції
![]() :
:
 ;
;
 ;
;
![]() .
.
4.
Класичні закони додавання швидкостей:
![]() .
.
Основна мета заняття: навчитися знаходити закон руху. Записати закон руху – це означає визначити положення тіла в деякій системі координат як функцію часу. Треба запам’ятати, що закон руху визначає положення тіла в даний момент часу, а не величину пройденого шляху. Як правило, запис закону руху проводиться в координатній формі. Вибір системи координат довільний; вибирати її необхідно кожного разу залежно від умов задачі так, щоб математичне рішення було спрощено. Наприклад, при розборі руху тіла, кинутого під кутом до горизонту, зручно вісь Оу направляти по горизонталі, вісь Ох – по вертикалі. Тоді рух уздовж осі Ох розглядається як рівномірний, уздовж осі Оу – рівнозмінний.