

Іv. Змістовий модуль 3
Динаміка системи матеріальних точок. Закони збереження.
Теоретичне ядро
Механічні системи та їх класифікація.
Найпростішим матеріальним об’єктом, механічний рух якого досліджується, є матеріальна точка, що є абстракцією реального матеріального тіла. Але в природі, як правило, маємо справу не з окремими тілами (точками), а з системами тіл, точок. Сукупність матеріальних точок (тіл), рух і положення яких взаємозв’язані між собою, називається системою матеріальних точок (тіл), або механічною системою.
Типи механічних систем:
а) консервативні механічні системи, в яких діють потенціальні сили (сили тяжіння і сили пружності);
б) неконсервативні системи, наприклад, в яких діють сили тертя.
Сили, що діють на точки (тіла) системи поділяються на два класи:
а) внутрішні сили – сили, з якими точки (тіла) механічної системи взаємодіють між собою;
б) зовнішні сили – сили, з якими тіла (точки), що не належать до системи, діють на точки (тіла) даної системи.
Остання класифікація – умовна, в залежності від постановки механічної задачі.
Механічні системи, в яких діють тільки внутрішні сили, називаються замкненими (ізольованими). Якщо на механічну систему діють крім внутрішніх і зовнішні сили, то механічна система називається незамкненою. Але в природі замкнених механічних систем не існує (крім Всесвіту вцілому), так як не існує вільних і ізольованих тіл. Іншими словами, замкнена система – це абстракція реальних механічних систем.
Математично умову замкненості механічної системи можна записати:
![]() ,
,
тобто, система точок називається замкненою, якщо результуюча всіх зовнішніх сил, що діють на систему, дорівнює нулю.
Імпульс механічної системи. Рівняння імпульсу механічної системи.
Нехай довільна механічна система складається із n-матеріальних точок з масами m1, m2, m3,….mi,….mn.
Тоді імпульс довільної точки:
![]()
Імпульсом механічної системи називається сумарний (результуючий) вектор, який дорівнює геометричній сумі векторів імпульсів окремих точок системи.

Нехай
на точки системи діють в загальному
випадку змінні сили. Розіб’ємо інтервал
часу Δt,
протягом якого відбувається взаємодія,
на нескінченне число нескінченно малих
проміжків dt
так, якщо діюча сила
![]() .
.
Тоді застосуємо II закон Ньютона в загальній диференціальній формі, який встановлює взаємозв’язок між імпульсом точки і імпульсом сили, записавши його для кожної ізольованої точки системи:
![]() або
або
 .
.
Для точки, що належить механічній системі II закон Ньютона запишеться в диференціальній формі:
![]() ,
,
згідно якого елементарна зміна імпульсу точки механічної системи дорівнює сумі елементарних імпульсів всіх зовнішніх і внутрішніх сил, що діють на точку. Нехай на точки системи діють як внутрішні сили, так і зовнішні:
m1:
![]()
m2:
![]()
.…………………..
mi:
![]()
…………………….
mn:
![]()
Тоді для кожної точки системи II закон Ньютона запишеться:
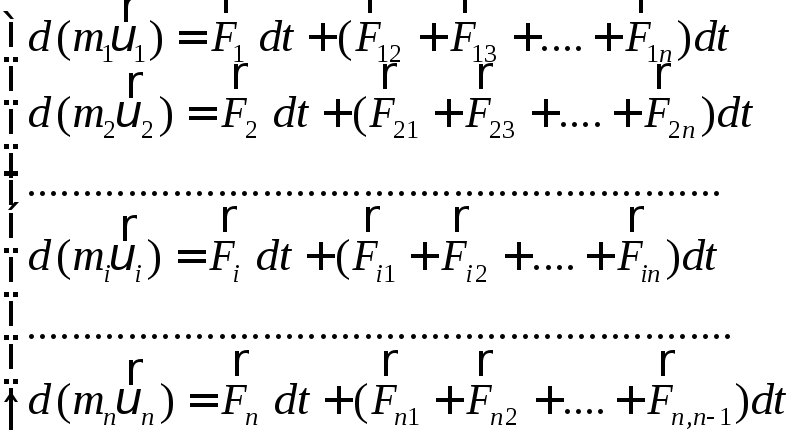
Щоб знайти загальну (сумарну) зміну імпульсу всіх точок системи необхідно додати почленно всі рівняння руху:

![]() –
сумарна
елементарна
зміна імпульсу всієї механічної системи.
–
сумарна
елементарна
зміна імпульсу всієї механічної системи.
 –елементарний
імпульс результуючої всіх
зовнішніх сил.
–елементарний
імпульс результуючої всіх
зовнішніх сил.
Якщо додавати імпульси всіх внутрішніх сил, то згідно з III законом Ньютона, матимемо:
![]() ,
,
тоді результуючий вектор внутрішніх сил дорівнює нулю:
![]()
і відповідно сумарний імпульс всіх внутрішніх сил теж дорівнює нулю. Отже маємо:

 (3-1)
(3-1)
Одержаний вираз носить назву рівняння імпульсів механічної системи:
Елементарна зміна імпульсу механічної системи (повний диференціал) дорівнює елементарному імпульсу результуючої всіх зовнішніх сил, що діють на систему;
або: швидкість зміни імпульсу механічної системи дорівнює результуючій всіх зовнішніх сил, що діють на систему.