

Предмет і завдання кінематики. Поняття матеріальної точки.
Механіка поділяється на два основні розділи: кінематику та динаміку.
Кінематика – І розділ класичної механіки, що вивчає закони механічних рухів макротіл незалежно від причин, які визначають характер цих рухів.
Основна задача кінематики: просторово-часовий опис механічного руху макротіл.
Кінематика – це геометрія механічного руху, тобто розділ механіки, де досліджуються геометричні параметри та властивості механічного руху.
Основні вступні поняття: а) система відліку; б) радіус-вектор; в) траєкторія; г) рівняння закону руху; д) пройдений шлях.
Найпростішим об’єктом, рух якого вивчає механіка є матеріальна точка.
Матеріальна точка – це тіло розмірами і формою якого можна знехтувати в умовах даної задачі.
Матеріальна точка – це абстракція реального матеріального тіла, яке в даній механічній задачі можна розглядати, як геометричну точку, що наділена масою рівною масі тіла.
Способи задання механічного руху матеріальної точки. Система відліку, траєкторія, рівняння і закон руху.
Рух одного і того ж тіла відносно інших тіл можна охарактеризувати по-різному в залежності від вибору СВ (приклад: рух космонавта відносно космічного корабля, відносно Землі, Сонця).
а) Опис руху будь-якого тіла має зміст тільки тоді, коли цей рух розглядається відносно іншого тіла, або системи тіл, які називаються тілами відліку.
б) Для кількісного опису механічного руху, що дає змогу однозначно визначити розміщення тіла у просторі, з тілом відліку зв’язують систему координат.
в) Так, як механічний рух відбувається і в просторі і в часі, то для повного опису руху потрібно знати розміщення тіла у будь-який момент часу. Для цього з системою координат зв’язують годинник, за допомогою якого визначають проміжки часу між двома подіями.
Сукупність трьох елементів: тіла відліку, системи координат, зв’язаної з тілом відліку і спосіб вимірювання часу (годинник) утворюють єдину систему відліку (СВ), яка називається просторово-часовою СВ.
СВ служить для визначення відносного розташування та пересування тіл у просторі.
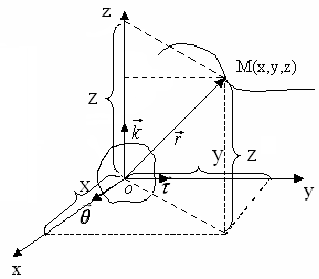
На практиці здебільшого користуються системою координат (x,y,z) (декартовою).
|
|
|
Рис. 1.1 |
а) координатним;
б) векторним;
в) траєкторним.
Під час руху матеріального тіла (точки) відносно СВ кожному моменту часу відповідатимуть певні значення її координат, які є деякими функціями часу t.
Функціональні залежності координат матеріальної точки від часу називаються кінематичними рівняннями руху в координатній формі.
Вони мають вигляд:
 (1-1а)
(1-1а)
Цей спосіб опису механічного руху називається координатним.
Вектор проведений з початку системи координат до матеріальної точки, називається радіус-вектором.
Положення
матеріальної точки в просторі можна
однозначно задати за допомогою
радіус-вектора
![]() (рис. 1.1). При русі матеріальної точки
величина і напрям
(рис. 1.1). При русі матеріальної точки
величина і напрям![]() змінюються з часом, тобто він є функцією
часу.
змінюються з часом, тобто він є функцією
часу.
Функціональні залежності координат матеріальної точки, її радіус-вектора від часу називаються кінематичними рівняннями руху.
![]() (1-1б)
(1-1б)
Функціональна
залежність
![]() називається векторним рівнянням руху,
а спосіб задання руху векторним.
називається векторним рівнянням руху,
а спосіб задання руху векторним.
Траєкторія – це геометричне місце точок, що відповідають кінцям радіус-вектора відносно вибраної СВ. Тобто лінія, яку описує кінець радіус-вектора.
В залежності від траєкторії руху:
а) прямолінійний рух;
б) криволінійний рух
Траєкторний
спосіб опису руху
![]() ґрунтується на тому, що задається
положення матеріальної точки на
траєкторії її руху у випадку, коли відомі
початок та напрям руху. Кінематичне
рівняння
ґрунтується на тому, що задається
положення матеріальної точки на
траєкторії її руху у випадку, коли відомі
початок та напрям руху. Кінематичне
рівняння![]() визначає закон руху вздовж траєкторії
(рис. 1.2).
визначає закон руху вздовж траєкторії
(рис. 1.2).
|
|
|
Рис. 1.2. |
а) координатний;
б) векторний;
в) траєкторний.
![]() (1-1в)
(1-1в)
Закон руху – це кінематичні рівняння руху, задані векторним, координатним або траєкторним способами, які однозначно визначають положення матері-альної точки в просторі в будь-який момент часу і крім цього визначають характер механічного руху.
У загальному випадку існують наступні способи опису механічного руху:
Аналітичний (координатний і векторний).
Графічний.
Словесний.
Табличний.
Між координатним і векторним способом опису руху існує взаємозв’язок:
![]() ,
,
![]() (1-2)
(1-2)
Лінія, яку описує матеріальна точка в просторі називається траєкторією руху.
Щоб знайти рівняння траєкторії в явному вигляді, необхідно з рівнянь руху в координатній формі виключити час t. F (x,y,z) = 0
Фізична скалярна величина, що визначається сумарною довжиною елементів траєкторії руху, пройденої точкою за даний проміжок часу, називається пройденим шляхом.
 ;
;
![]()
Шлях
є монотонно зростаючою функцією часу:
![]() .
.
Пройдений шлях – фізична скалярна величина, що вимірюється відстанню пройденою точкою вздовж траєкторії за даний проміжок часу.