

Тема 3. Работа и энергия. Динамика твердого тела
Лекция 4. Работа и энергия. Динамика твердого тела.
3.1. Энергия, работа, мощность
Энергия — едина как общая количественная мера движения и взаимодействия материи. Современное знание насчитывает 15 форм движения материи, и соответственно им получается следующая классификация видов энергии, которая охватывает все варианты энергетических превращений на Земле: тепловая, механическая, электрическая, электростатическая, электромагнитная, магнитостатическая, химическая, упругостная, ядерная, гравистатическая, гравидинамическая, аннитиляционная, нейтриностатическая, нейтринодинамическая, мезонная. Подразделение энергии на виды условно, так как она является универсальной мерой различных форм движения и взаимодействия. Заметим, что природа ограничивает выбор источников энергии незначительным кругом накопленных за время существования Земли невозобновляемых (химическая энергия ископаемых органических топлив, внутренняя теплота Земли, ядерная энергия деления, термоядерная энергия) и возобновляемых ресурсов (энергия морских приливов, солнечных лучей, ветра, рек). В одних энергетических процессах форма движения материи может не изменяться (например, в процессах передачи теплоты от тел, более нагретых, к телам, менее нагретым), в других процессах преобразования энергии одна форма движения материи может переходить в иную (например, при трении механическое движение переходит в тепловое и соответственно механическая энергия преобразуется в тепловую).
Чтобы характеризовать количественно процесс передачи направленного, упорядоченного движения материи или обмена энергией между взаимодействующими телами, в механике используется понятие работы силы или, просто, работы.
Для случая прямолинейного движения тела под действием постоянной силы F, которая составляет некоторый угол а с направлением перемещения длиной s, работа этой силы равна произведению:
А = Fs cosα, H • м = Дж.

![]() называют
скалярную величину
называют
скалярную величину
![]() ,
Дж, где a
— угол между векторами
,
Дж, где a
— угол между векторами
![]() и
и
![]() ;
;
![]() —элементарный
путь. Работа
силы на конечном участке
траектории 12 равна:
—элементарный
путь. Работа
силы на конечном участке
траектории 12 равна:
![]()
Рис.3.1
Мощность определяет скорость совершения работы: Р = dA/dt, Дж/с = Вт.
При
движении тела со скоростью
![]() под действием силы
под действием силы
![]() мощность,
развиваемая этой силой, за бесконечно
малый промежуток времени dt
равна
скалярному
произведению вектора силы на вектор
скорости:
мощность,
развиваемая этой силой, за бесконечно
малый промежуток времени dt
равна
скалярному
произведению вектора силы на вектор
скорости:
![]() , Вт.
, Вт.
3.2. Кинетическая энергия и работа
Кинетическая
энергия тела представляет собой энергию
его движения.
Движение возникает и происходит под
действием силы
![]() .
Энергия
движущегося тела при этом возрастает
на величину
совершенной силой работы. Иными словами,
работа dA
силы
.
Энергия
движущегося тела при этом возрастает
на величину
совершенной силой работы. Иными словами,
работа dA
силы
![]() на
бесконечно малом пути, который тело
прошло за время возрастания скорости
от 0 до
на
бесконечно малом пути, который тело
прошло за время возрастания скорости
от 0 до
![]() ,
идет на увеличение кинетической
энергии:
,
идет на увеличение кинетической
энергии:
dA = dEK.
Используя
для некоторой инерциальной системы
второй закон
Ньютона F=
md![]() /dt
и
умножая скалярно обе части равенства
на перемещение
/dt
и
умножая скалярно обе части равенства
на перемещение
![]() ,
получим
,
получим
![]()
С
учетом того, что
![]()
(3.1)
![]() .
.
Откуда
![]() ,
Дж.
Итак, тело массой т,
движущееся
со скоростью v,
обладает кинетической энергией
,
Дж.
Итак, тело массой т,
движущееся
со скоростью v,
обладает кинетической энергией
ЕK=mv2/2, Дж. (3.2)
Очевидно, что кинетическая энергия зависит только от массы и скорости тела. Траектория движения не оказывает влияния на величину Ек .
Используя равенство (3.1), можно получить связь между изменением кинетической энергии материальной точки и работой силы, приложенной к ней.
dA=mνdν;
![]()
![]() .
.
Кстати, у скаковой лошади при беге 80% ее энергии движения переходит в теплоту, которой достаточно для испарения 20 л воды в час. И еще, в Вооруженных Силах и во внутренних войсках используют кевларовые жилеты со структурой акульей кожи. Такие жилеты способны противостоять и пуле, и ножу. Энергия пули достигает 70 Дж на 1 мм2 поверхности, а энергия ножа — до 20 Дж на мм3.
3.3. Потенциальная энергия и работа
Пусть
некоторое тело перемещается в силовом
поле по некоторой
кривой 12 (рис. 3.2). Характер сил, действующих
на
тело,
может быть разнообразным.
Это могут быть силы тяготения,
электрические силы и
др. Рассмотрим работу, совершаемую
при движении тела в однородном
поле силы тяжести,
которое имеет место вблизи
поверхности Земли, где сила
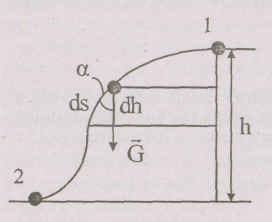 Рис.
3.2.
Рис.
3.2.
тяжести незначительно зависит от высоты (пока высота h мала по сравнению с радиусом земного шара.
Если разбить кривую 12 на элементарные отрезки, то каждый из них можно считать прямолинейным. Элементарная работа dA, совершаемая при передвижении по отрезку ds, будет равна dA = Gcosads, где G — сила тяжести, действующая на тело; α — угол между направлением силы тяжести и направлением перемещения. Из рис. 3.2 следует, что dscosa = dh. Здесь dh — бесконечно малое изменение высоты положения тела при его перемещении на отрезок ds. Работа силы тяжести при перемещении из состояния 1 в состояние 2 будет равна
![]() . (3.3)
. (3.3)
Из равенства (3.3) следует вывод о том, что работа силы тяжести не зависит от формы и длины пути, а определяется величиной вертикального отрезка h между начальным и конечным положением тела. Оказывается, что в природе есть и другие силы, помимо силы тяжести, которые обладают тем же замечательным свойством: работа по перемещению тела зависит только от положения начальной и конечной точек пути и не зависит от вида траектории и скорости движения. Такие силы, называют потенциальными. При движении материальной точки в поле потенциальных сил вводится понятие о потенциальной энергии, через разность которой определяется работа сил. Если тело перемещается из некоторой точки пространства 1 в другую точку пространства 2 и если при этом действующие на него силы совершают работу А12, то для потенциальных сил эта работа зависит только от положения точек 1 и 2. Это означает, что можно ввести такую физическую величину Еп, которая характеризует положение тела в поле потенциальных сил и которую можно назвать потенциальной энергией. Работа Ап в этом случае будет равна разности значений Еп1 и Еп2, которые принимает потенциальная энергия Еп в точках 1 и 2,
А = Ел1- Еп2. (3.4)
Выражение (3.4) определяет лишь разность потенциальных энергий в двух точках. В том случае, когда значение потенциальной энергии в одной из точек пространства (в данном случае из двух) равно нулю, можно говорить о значении потенциальной энергии в конкретной точке.
Рассмотрим пример нахождения потенциальной энергии тела в поле силы тяжести. По равенству (3.3) работа силы тяжести при перемещении тела между двумя точками пространства 1 и 2, из которых вторая отстоит от первой по вертикали на расстоянии h, равна Gh или А = mgh, где т — масса тела; g — ускорение, сообщаемое силой тяжести. Если обозначить высоту точки 1 через h1, и точки 2 через h2, то
А = mgh1- mgh2
С другой стороны, по формуле (3.4) А = ЕпГ Еп2.
При h2 = 0 значение потенциальной энергии Еп2 тела, лежащего на поверхности Земли, условно принято считать равным нулю. Тогда из сравнения двух последних равенств следует
Еп= mgh, Дж. (3.5)
Таким образом, потенциальная энергия тела с массой т, поднятого на высоту h, оказывается равной mgh. При падении тела сила тяжести совершает положительную работу А = mgh. Потенциальная энергия при этом убывает. Работа силы тяжести при подъеме тела отрицательна, а потенциальная энергия его возрастает.
Для изолированной системы, в которой отсутствуют непотенциальные силы, например сила трения, можно утверждать, что сумма кинетической и потенциальной энергий остается постоянной, то есть Е = Ек + Еп = const. Это утверждение называют законом сохранения механической энергии. Из закона следует, что при переходе системы из одного положения в другое могут меняться кинетическая и потенциальная энергии. Но их сумма остается постоянной.
3.4. Момент силы
Опыт показал, что при вращении тела, например закручивании болта гаечным ключом, существенным оказывается понятие момента силы, а не только модуля силы и длины рычага. Вектором момента силы относительно точки О (рис. 3.3) называют вектор М, модуль которого равен произведению модуля силы F на ее плечо I
М = Frsina = Fℓ, Н·м.

Рис. 3.3
Момент
силы относительно неподвижной
точки О представляет векторное
произведение радиуса-вектора
![]() точки
приложения силы на
силу
точки
приложения силы на
силу
![]() :
.
:
.![]() =
[
=
[![]()
![]() ].
Радиус-вектор г, проведенный из точки
О в точку приложения силы, и силаF
лежат
в плоскости рисунка.
Вектор момента силы
].
Радиус-вектор г, проведенный из точки
О в точку приложения силы, и силаF
лежат
в плоскости рисунка.
Вектор момента силы
![]() перпендикулярен
плоскости рисунка. Его направление
определяется по правилу правого винта.
Поворот головки винта в направлении
силы вызывает перемещение
винта в направлении вектора момента
силы. В данном
случае вектор
перпендикулярен
плоскости рисунка. Его направление
определяется по правилу правого винта.
Поворот головки винта в направлении
силы вызывает перемещение
винта в направлении вектора момента
силы. В данном
случае вектор
![]() момента силы направлен от нас и изображен
на рисунке 3.3 кружком с крестиком. Точка
О
находится
в центре кружка.
момента силы направлен от нас и изображен
на рисунке 3.3 кружком с крестиком. Точка
О
находится
в центре кружка.
Плечом силы называют длину перпендикуляра, опущенного из точки О на прямую, вдоль которой действует сила.
Если
сила приложена к одной из точек
твердого тела, то вектор
![]() характеризует
способность силы вращать тело
вокруг точки О.
В
реальных условиях под действием силы
твердое тело
вращается вокруг оси, проходящей
через точку О.
При
этом все точки
тела описывают окружности с центрами
на этой оси и имеют одинаковую угловую
скорость ω = dφ/dt
и
одинаковое ускорение ε = dω/dt.
Проекция
вектора
характеризует
способность силы вращать тело
вокруг точки О.
В
реальных условиях под действием силы
твердое тело
вращается вокруг оси, проходящей
через точку О.
При
этом все точки
тела описывают окружности с центрами
на этой оси и имеют одинаковую угловую
скорость ω = dφ/dt
и
одинаковое ускорение ε = dω/dt.
Проекция
вектора
![]() на
неподвижную ось z
является
скалярной физической величиной и
называется моментом силы относительно
оси z
(рис.
3.4): Mz=
[
на
неподвижную ось z
является
скалярной физической величиной и
называется моментом силы относительно
оси z
(рис.
3.4): Mz=
[![]()
![]() ].
Значение моментаМг
не
зависит от выбора положения точки О
на
оси z.
].
Значение моментаМг
не
зависит от выбора положения точки О
на
оси z.
3.5. Момент инерции. Момент импульса и закон его сохранения
Моментом инерции тела относительно оси вращения z называют сумму произведений масс п материальных точек этого тела на квадраты их расстояний до этой оси
![]() кг·м2.
кг·м2.
Указанную сумму можно свести к интегралу J=∫r2dm . Здесь величину r следует понимать как функцию положения точки с координатами х, у, z.
По
аналогии с моментом силы можно получить
еще одну важную
векторную характеристику вращающейся
материальной
точки — момент импульса материальной
точки относительно точки О.![]() ,
где
,
где
![]() - радиус-вектор, определяющий положение
материальной точки относительно точки
О, а
- радиус-вектор, определяющий положение
материальной точки относительно точки
О, а![]() —
импульс этой материальной
точки. Модуль момента
импульса материальной точки можно
представить в
—
импульс этой материальной
точки. Модуль момента
импульса материальной точки можно
представить в
виде
произведения
(рис. 3.5)
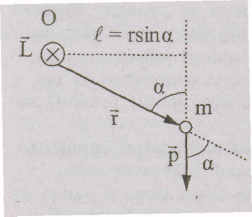 Рис.
3.5
Рис.
3.5
L = rpsina = рℓ, Дж·с.
Если материальная точка движется прямолинейно, то модуль момента импульса равен L = mvl, при движении материальной точки по окружности радиусом R момент импульса относительно центра окружности равен L = mvR.
Момент импульса твердого тела относительно оси z представляет собой сумму моментов импульса отдельных частиц
![]() , Дж·с.
, Дж·с.
Используя
формулу
![]() получим
получим
![]() ,
то
есть
,
то
есть
Lz=Jzω, Дж·с. (3.6)
Следует обратить внимание на то, что у ω индекс не ставится, так как эта величина одинакова для всех точек тела.
Итак, момент импульса твердого тела относительно оси z равен произведению момента инерции тела относительно той же оси на его угловую скорость.
Продифференцируем
уравнение (3.6) по времени
![]()
Момент силы относительно оси z может быть преобразован к виду:
![]()
Таким
образом, dLz/dt
=
M
. Наряду с изложенным, имеет место
векторное равенство
![]() .
В
изолированной системе момент внешних
сил отсутствует,
то есть
.
В
изолированной системе момент внешних
сил отсутствует,
то есть
![]() = 0 и
= 0 и![]() ,
а следовательно, момент импульса
изолированной системы остается
постоянным:
,
а следовательно, момент импульса
изолированной системы остается
постоянным:![]() const.
const.
Подобно законам сохранения энергии и импульса, закон сохранения момента импульса принадлежит к числу фундаментальных законов природы. Моментом импульса обладают не только движущиеся макроскопические системы, но и отдельные элементарные частицы, а также атомные ядра, атомы, их ассоциативные комплексы. Причем некоторые элементарные частицы и их системы могут иметь моменты импульса, не связанные с движением в пространстве, и называют их спинами.
В
справедливости закона сохранения
момента импульса можно
убедиться на опыте с уравновешенным
гироскопом. Он предоставляет
собой вращающееся симметричное твердое
тело, ось
вращения которого способна изменять
свое направление в пространстве
относительно некоторой неподвижной
точки, называемой
центром подвеса. Если центр подвеса
совпадает с центром
тяжести гироскопа, то результирующий
момент сил тяжести
всех частей по отношению к центру подвеса
равен нулю.
Такой гироскоп называют уравновешенным.
Так как гироскоп
симметричен, то его момент импульса
![]() направлен
вдоль
основной оси вращения, проходящей через
диск. Поэтому при любом положении
гироскопа ориентация его основной оси
вращения остается неизменной.
направлен
вдоль
основной оси вращения, проходящей через
диск. Поэтому при любом положении
гироскопа ориентация его основной оси
вращения остается неизменной.
Справедливость закона сохранения момента импульса подтверждается опытом со скамьей Жуковского. Горизонтальная круглая скамья вращается без трения. На ней стоит человек и держит в вытянутых руках гантели — (Jo + 2mг12)ω1 = const, где Jo — момент инерции человека и скамьи; m — масса одной гантели. Приближая гантели к груди, человек уменьшает моент инерции всей системы, а угловая скорость ее вращения должна при этом возрастать — (J + 2mr|22)ω2= (J0+ 2тr12)ω1, где 2mr12 и 2mr22 — моменты инерции гантелей в первом и втором положениях относительно оси вращения; г1 и г2 — расстояния от гантелей до оси вращения; ω1 и ω2, — угловые скорости вращения системы соответственно в состояниях 1 и 2.
Вращающаяся с большой скоростью масса сохраняет неизменной ось своего вращения, то есть сохраняет вектор момента импульса. Этим обусловлена устойчивость положения земной оси, продольной оси летящего снаряда, пули, вертикальная устойчивость движущегося велосипеда.
3.6. Основной закон динамики вращательного движения твердого тела. Кинетическая энергия вращающегося тела
Из равенства Мz =Jz dw /dt с учетом того, что dw/dt представляет собой угловое ускорение, следует основной закон динамики вращательного движения твердого тела относительно неподвижной оси
Мz= Jze, H • м.
Очевидно, что угловое ускорение, сообщаемое телу моментом силы, тем больше, чем меньше момент инерции, то есть момент инерции характеризует инерционные свойства тела при вращательном движении. Но в отличие от массы, момент инерции конкретного тела может иметь множество значений соответственно множеству возможных осей вращения.
Кинетическая энергия одной частицы массой тi вращающегося, тела, движущейся со скоростью vi по окружности радиусом ri , равна: Eki= тi vi2/2 = тi ri2w2/2= Jiw2/2, Дж,
где Ji — момент инерции материальной, точки; w — угловая скорость вращения тела. Суммируя энергии Екi всех материальных точек, получим формулу для кинетической энергии тела, вращающегося вокруг неподвижной оси z: Ek= Jzw2/2, Дж.
В технике для равномерного хода прокатных станов, кораблей, тракторов и других машин широко используют маховое колесо, аккумулирующее кинетическую энергию вращения вала. К сведению, скорость вращения композитных роторных устройств (маховиков в том числе) достигает 600 тыс. оборотов в минуту. Это чрезвычайно высокая скорость. Прочность, необходимая при этом, обеспечена композитом.
Если тело одновременно участвует в поступательном и вращательном движениях, то его кинетическая энергия определяется следующим образом:
Ek = mv2/2 + Jzw2/2, Дж.
Работа вращающего момента силы, приложенной к телу, равна изменению кинетической энергии тела
А =
Jz![]() /2
— Jz
/2
— Jz
![]() /2,
Дж.
/2,
Дж.
Каждой физической величине, характеризующей поступательное движение, соответствует определенная физическая величина, характеризующая вращательное движение. Эта аналогия наблюдается и при сравнении законов поступательного и вращательного движений. Однако в математических выражениях для вращательного движения вместо силы присутствует ее момент, а роль массы выполняет момент инерции, аналогом же импульса тела является момент импульса тела. Сказанное для наглядности представлено в табл. 3.1.
Таблица 3.1 Основные физические величины и формулы для поступательного и вращательного движений
-
Поступательное движение
Вращательное движение
Время
t,
с
Время
t,
с
Масса
т,
кг
Момент инерции
J,
кг.м2
Линейный путь
s,
м
Угол поворота
 ,
,рад
Скорость
 ,
,м/с
Угловая скорость
w = d
 /dt.
/dt.рад/с
Ускорение
м/с2
Угловое ускорение
 = dw/dt.
= dw/dt.рад/с2
Сила
 ,
,Н
Момент силы.
Mz или
 ,
, =[
=[ ]
]Н.м
Импульс тела
 ,
,Н·с
Момент импульса тела
Lz=Jzw
Дж.с
Импульс силы
Н·с
Импульс момента силы
dLz=Mzdt
Дж.с
Основное уравнение динамики

 ,,
,,Н
Н
Основное уравнение динамики
Mz=Jz

Н.м
Н.м
Работа

Дж
Работа

Дж
Кинетическая энергия
Ek = mv2/2
Дж
Кинетическая энергия
Ek=Jzw2/2
Дж