

15.2. Роторные траншейные экскаваторы
Рабочее оборудование роторного траншейного экскаватора состоит из рабочего колеса — ротора 6,установленного на поддерживающих 5и направляющих 11роликах рабочей рамы 14,закрепленной на раме обечайки 13,ножевых откосников 12,зачистного щита 10,задней опоры 9и отвального конвейера 4(рис. 15.2, а). Несущими элементами ротора служат два кольца 20(рис. 15.2, б), расположенные в параллельных плоскостях, с закрепленными по периферии ковшами. На широких роторах ковши устанавливают в два ряда со смещением одного ряда относительно другого на половину шага ковшей, обеспечивая этим более равномерную нагрузку на ротор при копании грунта. Ковш состоит из арки 19 г установленными в ее передней части зубьями или без них и цнища 18из переплетенных в двух направлениях цепей. Ковши открыты в лобовой части для поступления в них грунта и с внутренней стороны для разгрузки.
Все операции рабочего процесса ротора выполняются при его непрерывном вращении в сочетании с поступательным движени- гм тягача. При движении ковшей по забою снизу вверх они разрабатывают грунт и заполняются им. От просыпания грунта внутрь ротора предохраняет неподвижно установленная на рабочей раме обечайка 5(рис. 15.2, в)с верхним краем в начале зоны разгрузки. По достижении ковшами этой зоны грунт разгружается в открывшуюся внутреннюю полость ротора на отвальный конвей- гр 4,а далее последним — в бруствер с одной стороны траншеи (рис. 15.2, г).Цепные днища ковшей, благодаря подвижности цепных звеньев от собственного веса, способствуют более полному опорожнению ковшей.
Рис.
15.2. Траншейный роторный экскаватор:
а
— общий вид;
б — ротор;
в — схема переноса
грунта ковшами и их разгрузки;
г — схема работы
отвального конвейера;
д — схема расстановки
зубьев на ковшах
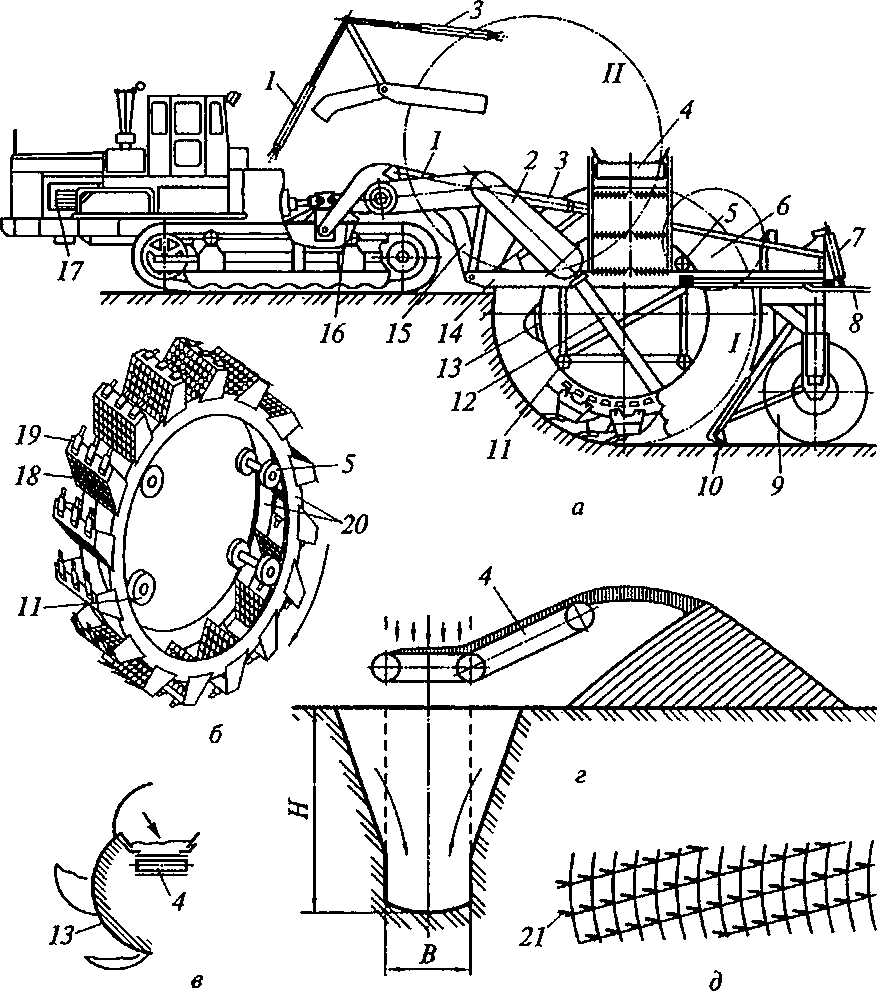
Для эффективной разработки грунта зубья на ковшах устанавливают по схеме (рис. 15.2, д),реализующей метод «крупного скола», заключающийся в том, что в пределах каждой из двух или трех одинаковых групп последовательно расположенных на роторе ковшей каждый зуб 21перемещается по своей полосе, следуя за зубом предшествующей группы в той же полосе. Так, при двух- групповой расстановке, реализуемой в конструкциях отечественных траншейных роторных экскаваторов, и при 14-ковшовом роторе по следу зубьев 1-го ковша перемещаются лишь зубья 8-го ковша, по следу 2-го — зубья 9-го ковша и т.д. По ширине передней кромки зубья расставлены примерно с одинаковым шагом. Для повышения износостойкости зубьев их передние грани упрочнены износостойкими наплавками или напайками из вольф- рамокобальтовых пластин состава ВК15, по твердости соизмеримых с оксидом кремния, входящего в состав большинства фунтов.
Ножевые откосники 12(см. рис. 15.2, а)устанавливают с двух сторон ротора наклонно в продольном и поперечном направлениях, закрепляя их неподвижно на кронштейнах рамы. При движении экскаватора они отделяют грунт в зоне откосов от массива (см. рис. 15.2, г),гдеон обрушивается вниз, захватывается ковшами и выносится на разгрузку вместе с грунтом, отделяемым от массива в лобовой части забоя.
Отвальные ленточные конвейеры имеют два конструктивных варианта: с цилиндрической поверхностью рабочей ветви конвейерной ленты — криволинейные, устанавливаемые на малых моделях экскаваторов, и двухсекционные(см. рис. 15.2, г), составленные из двух прямых секций, из которых одна — горизонтальная — является приемной, а вторая — наклонная — отвальной. Последняя устанавливается под требуемым углом к приемной секции с помощью гидроцилиндра. Двухсекционные конвейеры устанавливают на средних и тяжелых экскаваторах. При переводе экскаватора в транспортное положение криволинейный конвейер устанавливают симметрично продольной оси экскаватора, а отвальную секцию двухсекционного конвейера откидывают вниз, уменьшая этим габаритную ширину рабочего оборудования. Скорость движения конвейерной ленты не превышает 5 м/с.
Установленный в задней части рабочей рамы зачистной щит 10 (см. рис. 15.2, а)служит для профилирования дна траншеи путем срезания фебней, образованных смежными зубьями, и зачистки фаншеи от осыпавшегося фунта из неполностью разфуженных возвращающихся в забой ковшей. Обычно его соединяют с задней опорой в виде сдвоенного колеса или лыжи. Для частичной раз- фузки задней опоры при разработке тяжелых, включая мерзлые, Фунтов тяжелые модели роторных траншейных экскаваторов дополнительно оборудуют лыжами 8,управляемыми гидроцилиндрами 7, или колесными опорами с каждой стороны рабочей рамы с опиранием их на бровки траншеи.
Для соединения рабочего оборудования с тягачом используют сцепное устройство в виде ползунов, перемещающихся по направляющим, установленным на тягаче, либо в виде плоского коленча- то-рычажного механизма 15с опорно-поворотным устройством 16 или без него. Для установки рабочего оборудования на фебуемую глубину траншеи, а также для его перевода из рабочего I положения в транспортное IIи наоборот используют гидравлические цилиндры 1 и 3. Опорно-поворотное усфойство позволяет экскаватору работать на закруглениях без заклинивания ротора в траншее, а также при поворотных движениях экскаватора с полуприцепным рабочим оборудованием в транспортном положении.
Роторные траншейные экскаваторы оборудуют автономной дизельной силовой установкой 17.Для передачи движения исполнительным механизмам (ходовому устройству, ротору, отвальному конвейеру и вспомогательным устройствам для подъема рабочего оборудования и отвальной секции двухсекционного конвейера, установки дополнительных опор) применяют механические, гидромеханические и электрические трансмиссии. Для передвижения на транспортных скоростях обычно используют многоскоростную реверсивную коробку передач базового трактора, а для передвижения на рабочих скоростях к ней подключают ходоуменьшитель, работающий как понижающий редуктор. В гидромеханическом варианте ходовое устройство в рабочем режиме приводится в движение гидромотором, питаемым рабочей жидкостью от регулируемого насоса. Эта схема обеспечивает бесступенчатое регулирование скоростей в нескольких диапазонах при совместной работе коробки передач и ходоуменьшителя и позволяет выбирать рациональные скоростные режимы в зависимости от категории разрабатываемых грунтов.
Ротор приводится в движение через механическую трансмиссию на тягаче, две двухступенчатые цепные передачи 2и две открытые зубчатые пары шестерня — зубчатый венец ротора с каждой стороны последнего. Движение отвальному конвейеру передается от приводного вала ротора через систему цепных передач. Применяется также индивидуальный привод ротора и отвального конвейера от электродвигателей, питаемых электроэнергией от приводимого дизелем генератора переменного тока. Для привода вспомогательных механизмов используют обычно объемный гидропривод с нерегулируемыми насосами.
Техническая производительность роторного экскаватора обеспечивается ковшами zвместимостью q(м3) каждого и частотой вращения ротора п (об/мин) в соответствии с зависимостью Пт== 60qznkn/kp.Коэффициент наполнения ковшей = 0,8...0,9 (меньшие значения для мелкофракционных сыпучих, а также липких грунтов, большие — для сыпучих кусковатых грунтов). Коэффициент разрыхления фунта приведен в табл. 13.1.