

10.4. Лебедки
Лебедками называют устройства для подъема (подъемные лебедки) или горизонтального перемещения (тяговые лебедки) грузов. По виду привода они могут быть ручными и приводными (от : электродвигателя, гидромотора или ДВС). Барабанные лебедки оборудуют одним или двумя барабанами. В конструкциях шахтных подъемников (лифтов), а также в качестве подъемных устройств подвесных подмостей, используемых при ремонте фасадов зданий, нашли применение безбарабанные лебедки с канатоведу- щим шкивом. Лебедки характеризуются тяговым усилием и ско- ' ростью движения каната (окружным усилием или скоростью на первом слое навивки каната на барабан или в набегающей на ка- натоведущий шкив ветви каната). Барабанные лебедки, кроме того, характеризуются канатоемкостью барабана — максимальной длиной каната, укладываемого на барабан.
Ручные лебедки наиболее просты по устройству (рис. 10.13). Их используют, в основном, как вспомогательное монтажное оборудование. Лебедка состоит из барабана 7, открытых зубчатых передач Зи 7, дискового грузоупорного тормоза 5, установленных на параллельных валах, опирающихся на подшипники в боковинах станины 2. Поднимают и опускают груз вращением рукояток 4 одним, двумя или четырьмя рабочими. При кратковременной работе усилие одного рабочего на рукоятке не превышает 200 Н. Для увеличения скорости подъема легких грузов служит зубчатый перебор 6, дискретно изменяющий передаточное число зубчатой передачи.
Наибольшее распространение как в приводах грузоподъемных машин с электроприводом, так и как самостоятельные подъемные механизмы получили электрореверсивные лебедки (рис. 10.14). Барабан такой лебедки приводится электродвигателем 4 через зубчатый редуктор 1. Лебедка оборудована нормально замкнутым двух- колодочным тормозом 2, установленным на шкиве упругой втулоч-
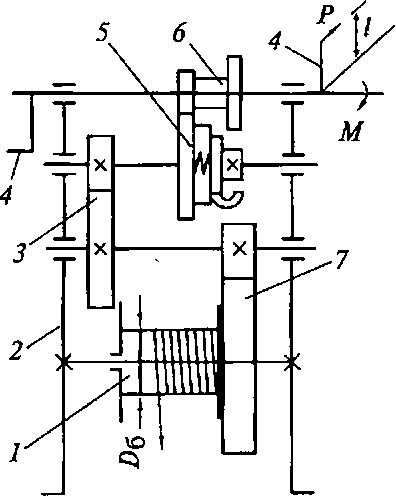
Рис. 10.14.
Электрореверсивная лебедка (а) и ее
кинематическая схема (б)
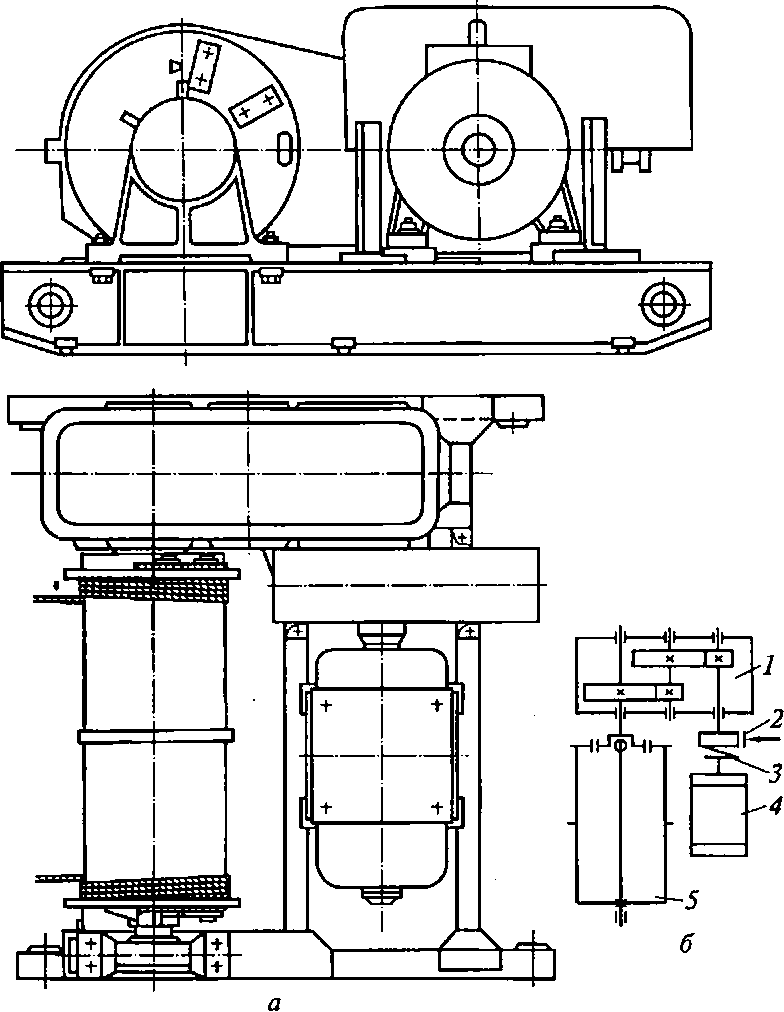
ры барабана 5 закреплены на сварной раме, устанавливаемой на фундамент (для лебедок как самостоятельных подъемных механизмов) или на несущем каркасе грузоподъемной машины. Опускают груз или только грузозахватные приспособления реверсированием электродвигателя.
Существуют и более компактные, но и более дорогие электрореверсивные лебедки со встроенными в барабан планетарными редукторами и электродвигателем.
Тяговые усилия наиболее часто применяемых однобарабанных электрореверсивных лебедок составляют 3,2... 125 кН при скорости каната 0,5...0,1 м/с и канатоемкости 80...800 м.
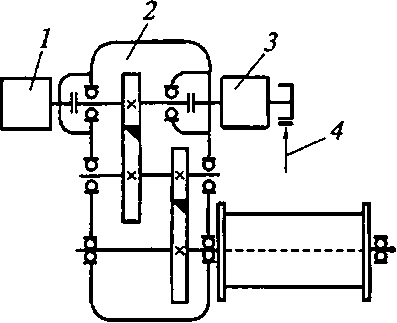
Многоскоростные лебедки широко применяют в подъемных механизмах кранов с электроприводом, работающих на монтаже строительных конструкций. Для привода такой лебедки используют два электродвигателя, установленные по разные или по одну сторону редуктора 2 (рис. 10.15). Для подъема и опускания номинального груза с номинальной скоростью используют основной двигатель 3 при невключенном, но с вращающимся валом, вспомогательном двигателе 1. Малые
грузы и крюк без груза поднимают и опускают вспомогательным двухскоростным двигателем 1, номинальная частота вращения вала которого значительно выше, чем основного двигателя. «Посадочная» скорость, используемая при установке строительных конструкций в проектное положение, обеспечивается совместной работой основного двигателя в специальном режиме динамического торможения и вспомогательного двигателя на малой скорости. Как и у односкоростных лебедок, тормоз 4 устанавливают на быстроходном валу, обычно — на валу основного двигателя.
В конструкциях машин с групповым приводом применяют также лебедки с двумя барабанами, посаженными на один вал. В этом Случае каждый барабан подключают к единой трансмиссии через фрикционные муфты, благодаря чему оба барабана можно включать в работу как одновременно, так и поочередно. Устройство и кинематика таких лебедок применительно к приводам одноковшовых канатных экскаваторов будут рассмотрены в гл. 14.
Рис.
10.15. Кинематическая схема двухдвигательной
лебедки
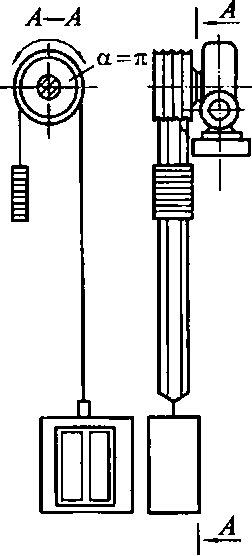
вии противовес обычно удерживает груженую и негруженую кабину без проскальзывания канатов относительно шкива.
Для подъема грузов небольшой массы (до 5 т) на высоту до 3 м, например, при выполнении ремонтных работ, используют ручные тали (рис. 10.17), которые подвешивают к потолочным балкам, треногам и другим устройствам с помощью крюка 5. Тяговым органом является грузовая пластинчатая или овально- звеньевая цепь 1, охватывающая звездочку 3, жестко связанную с червячным колесом 4 червячного редуктора. Для подъема и опускания груза червяк 7 приводят во вращение вручную цепью 8, охватывающей цепное колесо 6. Для увеличения КПД применяют двухза- ходную несамотормозящую червячную передачу, а для удержания груза на весу используют дисковый или конический грузоупорный тормоз 2. Во избежание спадания грузовой цепи со звездочек ее пропускают между блоком 10 крюковой обоймы и пальцами, соединяющими боковые пластины 9.
Прилагаемое к приводной цепи усилие связано с массой поднимаемого груза (вместе с крюковой обоймой и тяговой цепью) соотношением
Р = mgr/(2Ruл),
где Р — усилие, прилагаемое к приводной цепи, Н; т — масса поднимаемого груза, кг; г и R — радиусы начальных окружностей звездочки и цепного колеса, м; и — передаточное число червячной передачи; л — КПД тали, учитывающий потери энергии на трение в червячной передаче, в паре приводная цепь — цепное колесо, а также в зацеплениях тяговой цепи со звездочкой и с блоком крюковой обоймы.
Рис. 10.17. Ручная
червячная таль
Q

нов (см. гл. 11) применяют тали с электрическим приводом (тельферы) (рис. 10.18), перемещаемые по монорельсовым путям прямолинейного или замкнутого контура собственным механизмом передвижения 1. Подъемный механизм 2 электротали приводится в движение прифланцованным к корпусу 6 или встроенным в барабан 7 асинхронным короткозамкнутым крановым электродвигателем 8 через редуктор J. Таль оснащена действующим автоматически нормально замкнутым дисковым электромагнитным тормозом 4. Управляют электроталью с пола с помощью кнопочного Пульта 3, подвешенного на гибком кабеле.
Грузоподъемность электроталей составляет обычно 0,25 ...5 т, ^высота подъема — до 6 м, скорость подъема груза — 8 м/мин, ^скорость передвижения — 20 м/мин. Известны также электротали ^Грузоподъемностью 10 т при высоте подъема до 20 м.
Контрольные вопросы
Для чего применяют в строительстве грузоподъемные машины? Перечислите основные группы грузоподъемных машин и приведите их об- |«УЮ характеристику. Назовите основные параметры грузоподъемной ЮШины. Что такое грузоподъемность?

Рис. 10.18. Электроталь (а) и ее кинематическая схема (б)
а б
Для чего применяют домкраты? Перечислите их типы, опишите Устройствои принципработы каждого типа, назовитеих основные параметры,изложите методику определения усилия на рукоятке в зависимостиот массы поднимаемого груза и параметров домкрата. Каковы до- Юскаемые значения этого усилия? Каковы условия самоторможения винтового ломкпята?
Назовите виды стальных канатов. Какими параметрами характеризуется канат? По какой характеристике выбирают канаты? Что такое коэффициент запаса прочности каната, каково его значение для различных видов канатных механизмов? По каким критериям выбраковывают канаты?
Какими способами закрепляют концы канатов на элементах конструкции машин?
Каково назначение канатного блока и как он устроен? Обоснуйте зависимость диаметра блока от диаметра каната в соответствии с нормами Госгортехнадзора.
Как устроен полиспаст? Что такое кратность полиспаста и как она определяется? Как определяется КПД полиспаста?
Как устроены барабаны лебедок? Каким способом закрепляют конец каната на барабане?
Назовите типы крюков. Для чего они предназначены?
Для чего применяют и как устроены стропы? Назовите другие виды грузозахватных приспособлений.
Каково назначение, как устроены и как работают ковши-грейферы?
Для чего применяют лебедки? Назовите их основные типы. Для чего применяют безбарабанные лебедки? Какими параметрами характеризуются лебедки? Каково назначение, как устроены и как работают ручные, электрореверсивные, многоскоростные лебедки, лебедки с ка- натоведущими шкивами, ручные и электрические тали?