

Глава 12. Погрузочно-разгрузочные машины
12.1. Назначение и виды машин
Погрузочно-разгрузочные машины предназначены для погрузки штучных грузов и сыпучих материалов на транспортные средства (железнодорожные вагоны, автомобили, конвейеры), для разгрузки их с транспортных средств, а также для перемещения в хранилищах при складировании и сортировке. Их разделяют:
по рабочему процессу на машины цикличного и непрерывного действия',
виду ходового оборудования на машины рельсоколесные, пнев- моколесные и гусеничные. Известны также стационарные погрузочно-разгрузочные машины.
Рабочий цикл машины цикличного действия состоит из операций захвата материала, его перемещения, выгрузки и возврата рабочего органа или машины в целом на исходную позицию следующего рабочего цикла. Машины непрерывного действия могут быть оборудованы несколькими рабочими органами, установленными с определенным шагом, например, на бесконечной тяговой цепи, или рабочим органом, например шнекового типа. При работе в цикличном режиме машина выполняет перечисленные операции последовательно. В машинах непрерывного действия материал поступает на рабочий орган, перемещается вместе с ним или по нему и разгружается непрерывным потоком.
12.2. Машины для перегрузки штучных грузов
Для перегрузки единичных грузов большой массы (железобетонных изделий, контейнеров с кирпичом и каменными блоками, ящиков с оборудованием, длинномерного лесоматериала и профильного металла) при одновременном их перемещении по строительной площадке, а также при монтаже применяют вилочные автопогрузчики и краны-манипуляторы.
Вилочным автопогрузчиком называют подъемно-транспортную машину с вертикальным телескопическим подъемником и подвешенными на нем грузовыми вилами (рис. 12.1, а). В качестве сменных рабочих органов используют: штырь для рулонов и коротких труб (рис. 12.1,5), захват для бревен (рис. 12.1, в), ковш для сыпучих материалов (рис. 12.1, г), безблочную стрелу (рис. 12.1, д), крано-
Рис. 12.1. Сменные
грузозахватные органы автопогрузчиков
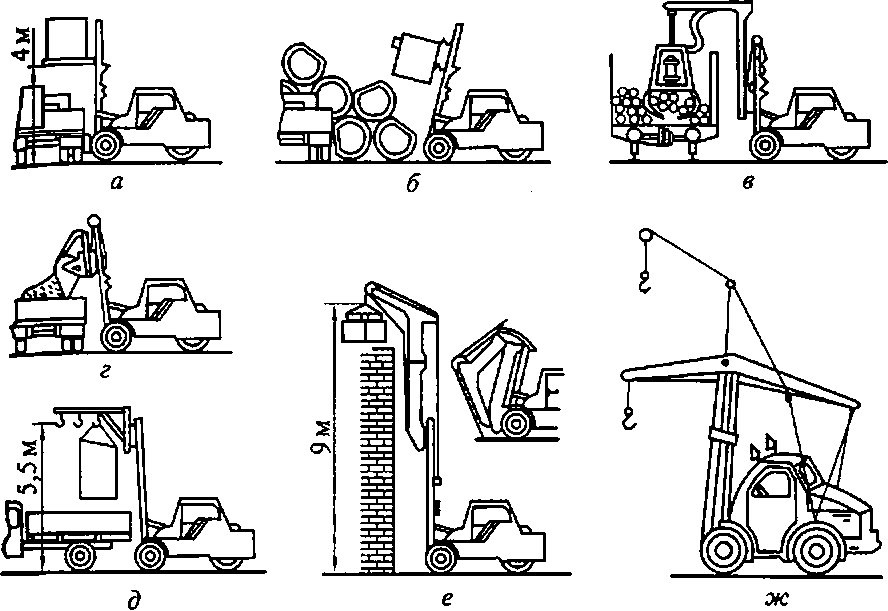
вую стрелу (рис. 12.1, е), рычажную крановую стрелу (рис. 12.1, ж) для увеличения высоты подъема, приспособление для захвата контейнеров и др. Рабочий орган может быть установлен в передней (фронтальные погрузчики) или боковой (боковые погрузчики) части машины. В строительстве применяют погрузчики с питанием от ДВС (автопогрузчики). В транспортных сетях заводов строй- |индустрии и промышленных предприятий используют также погрузчики с электрическим приводом постоянного тока с питанием от аккумуляторных батарей (электропогрузчики). По грузоподъемности погрузчики делят на легкие (до 2 т), средние (от 3,2 до 5 т) и тяжелые (от 5 до 10 т) и сверхтяжелые (более 10 т). При увеличении вылета груза, например при крановом рабочем оборудовании, грузоподъемность погрузчика снижается. В строительстве наибольшее распространение получили фронтальные автопогрузчики средней грузоподъемности.
Фронтальный автопогрузчик (рис. 12.2) состоит из самоходного короткобазового шасси, изготовленного, в основном, из стандартных автомобильных узлов и деталей: ДВС с коробкой передач, ведущего и управляемого мостов с ходовыми колесами, рулевого управления и т.п. В отличие от автомобиля задний мост со спаренными ведущими колесами установлен в передней части Машины, а управляемый мост — в ее задней части, что обусловлено развеской массы машины с грузом, при которой большая
Рис. 12.2. Фронтальный вилочный автопогрузчик
нагрузка приходится на ее переднюю часть. Соответственно изменена ориентация органов управления и рабочего места машиниста. Короткая автомобильная база обеспечивает погрузчику высокую маневренность — способность разворачиваться в стесненных условиях, например, в складских помещениях.
Грузоподъемник состоит из двух рам — внешней 1 и внутренней 2, подъемной каретки 7 с грузовыми вилами 4, подъемного механизма и двух гидроцилиндров 10 отклонения внешней рамы от ее вертикального положения. Внешняя рама в нижней части шарнирно соединена с рамой самоходного шасси и с помощью двух гидроцилиндров может наклоняться вперед на угол до 3° для подвода вил под груз при его захвате и назад на угол до 10° для предотвращения сползания груза с вил при его вертикальных перемещениях, а также при передвижении погрузчика. Внутренняя рама с помощью гидравлического толкателя 3 одностороннего
действия, шток которого 9жестко закреплен на поперечине 5внутреннейрамы, и обратного двукратного полиспаста (мультипликатора), состоящего из двух грузовых цепей 8, закрепленных концами на внешней раме и грузовой каретке и огибающих звездочки 6,подвешенные к поперечине внутренней рамы, может перемещаться вверх по направляющим внешней рамы. Аналогично по направляющим внутренней рамы может перемещаться грузовая каретка 7. Благодаря мультипликатору скорость перемещения хрузовой каретки в два раза превышает скорость перемещения штока гидротолкателя. Опускают груз гравитационно. Гидроцилин- дры питаются рабочей жидкостью от лопастного или шестеренного насоса, приводимого двигателем автопогрузчика.
Рабочий цикл фронтального автопогрузчика состоит из следующих операций: захвата установленного на подкладках штучного или тарного груза (подвод вил под груз, наклон внешней рамы назад); перемещения погрузчика к месту разгрузки, при необходимости с подъемом груза; установки груза на подкладки в месте разгрузки и возврата погрузчика на исходную позицию следующего рабочего цикла. В зависимости от ситуационных местных условий и дальности передвижения погрузчик может перемещаться как передним ходом с разворотами, так и задним ходом, загружаться и разгружаться на любой высоте в пределах вертикального
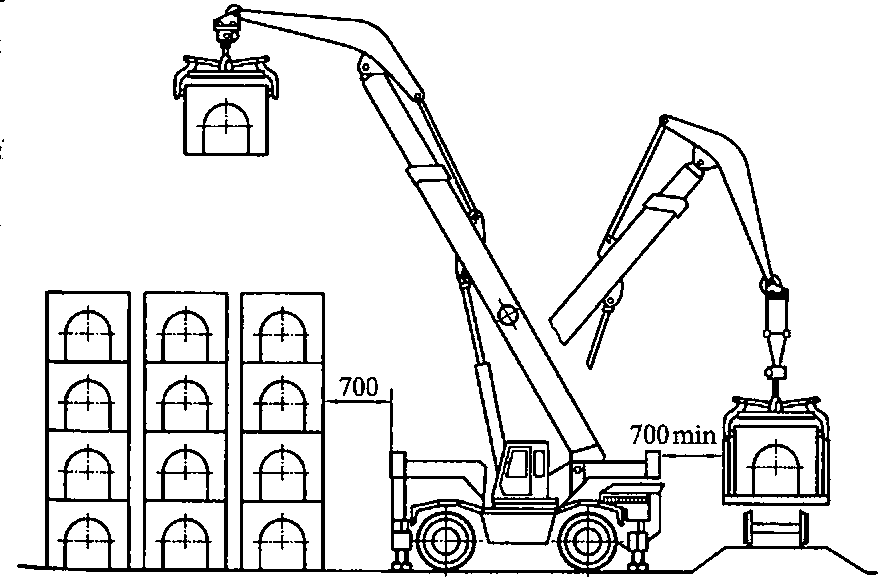
Рис.
12.3. Кран-манипулятор на короткобазовом
шасси с дистанционно Управляемым
грузозахватным устройством для
перегрузки утяжелителей
для
трубопроводов
хода вил. Максимальная высота подъема вилочного захвата автопогрузчика средней грузоподъемности составляет примерно 4,5 м, а груза на крюке Г-образной стрелы до 7 м. Скорость подъема груза составляет от 0,5 до 10 м/мин, а скорость передвижения по дорогам с твердым покрытием до 50 км/ч.
Краны-манипуляторыпредставляют собой специальные подъемно-транспортные средства, обычно с дистанционно управляемым грузозахватным устройством. В качестве примера на рис. 12.3 показан кран-манипулятор на короткобазовом шасси с грузозахватным устройством, подвешенным на гуське телескопической стрелы, смонтированной на поворотной части машины. Краны-манипуляторы изготавливают также на базе автомобилей, тракторов и одноковшовых полноповоротных экскаваторов.