

4.2. Фрикционные передачи
Во фрикционных передачах (рис. 4.3) ведущее и ведомое звенья — цилиндрические или конические катки жестко посажены на вращающиеся в подшипниках валы и прижаты друг к другу. При вращении ведущего катка, приводимого двигателем или предшествующей передачей, ведомому катку сообщается вращение за счет возникающих на контактной поверхности сил трения. Линейная скорость ведомого катка vj в зоне контакта из-за упругого проскальзывания отстает от линейной скорости ведущего катка v{:
vi = (4.5)
где £ — коэффициент, учитывающий указанное выше отставание, называемое упругим проскальзыванием-, для передач, работающих без смазки, С, = 0,990...0,995.

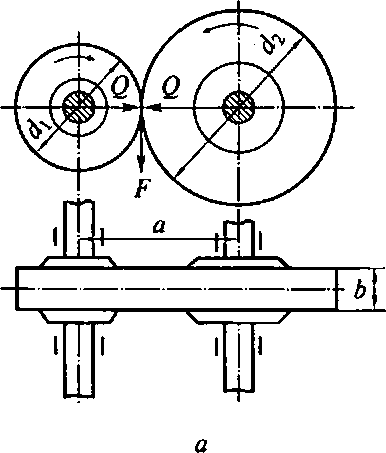
Рис. 4.3. Фрикционные передачи с цилиндрическими (а) и коническими
(б) катками
Между окружной v и угловой ю скоростями, а также диаметром катка d существует зависимость: v= dtо/2. Выражая эти символы подстрочными индексами соответственно их принадлежности к звеньям передачи, из соотношения (4.5) получим
d2iо2 = L,dxa>u
откуда
/=e»,/®2=rf2/(rfI0. (4-6)
Окружное усилие на ведущем катке
F = 2T^x/db
где Тх — крутящий момент на валу катка, Нм; ri t — КПД подшипников ведущего вала; dx — диаметр ведущего катка, в случае конических катков измеренный по срединной окружности конуса, м. Этим усилием создается крутящий момент на ведомом валу
Т2 =Fd2T\2/2,
где d2 — диаметр ведомого катка; -п2 — КПД подшипников ведомого вала.
Исключая из двух последних выражений параметр Fu учитывая отношение (4.6), найдем зависимость между моментами Г, и Т2:
Т2 ^/тьПгС-
Сравнивая эту зависимость с зависимостью (4.4), получим
Т1 = Л1Л2С, (4.7)
что согласуется с общим определением КПД, учитывающим внутренние потери энергии при передаче движения, включая упругое проскальзывание по контактным поверхностям. В среднем ri = = 0,90...0,95.
Функционирование фрикционной передачи определяется условием F< Fnpea. Предельное значение силы трения на контактирующих поверхностях, выражаемое в ньютонах:
F^ = fQ, (4.8)
где / — коэффициент трения, зависящий от материала трущихся пар, их смазки и других факторов, ориентировочно для трения стали по стали или чугуну со смазкой и без нее соответственно/= = 0,04 — 0,05 и / = 0,10...0,15; стали или чугуна по текстолиту всухую/= 0,2... 0,3; Q — нормальное усилие на контактной поверхности, Н.
Невыполнение указанного выше условия приводит к проскальзыванию (буксованию) ведущего катка относительно ведомого без вращения последнего.
Передаточное отношение конической фрикционной передачи выражается формулой
/ = sina2/(£sin a,),
которая получается из формулы (4.6) и геометрических соотношений (рис. 4.3, б).
В случае перпендикулярных осей вращения ведущего и ведомого катков:
/ = cos а, / (С sin a,).
В двух последних формулах через ai и Ог обозначены половины углов при вершинах конусов соответственно ведущего и ведомого катков.
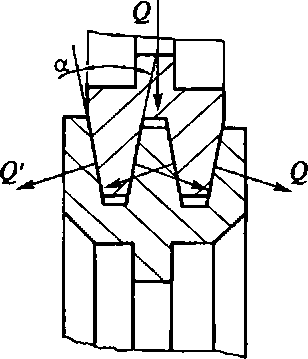
Рассмотренные фрикционные передачи просты по форме рабочих поверхностей катков, но, из-за необходимости создания больших контактных усилий, нуждаются в специальных прижимных устройствах. Поэтому их валы и подшипники испытывают повышенные нагрузки, а тела качения подвержены износу, особенно при буксовании. Этих недостатков лишены передачи с клинчатыми катками, рабочие поверхности одного из которых своими клиновыми выступами входят в канавки такой же формы другого (рис. 4.4). Нормальная сила давления на одной стороне каждой канавки, вызванная силой прижатия Q одного катка к другому, составит
Q' = Q/ (2z sin (а/2)), а суммарная сила давления по всем z канавкам Ql= Q'-2z= <3/sin (a/2),
где z — число канавок; a — угол развала канавок.
Для получения большего значения Q' и, следовательно, Q\ угол а должен быть по возможности малым. Во избежание заклинивания сопрягаемых катков его ограничивают значением a = 15°. Заменяя в формуле (4.8) Q на Q\ и обозначая коэффициент пропорциональности
/пр=// sin (а/2), (4.9)
для предельной силы трения на рабочих поверхностях клинчатой фрикционной передачи получим
Рис.
4.4. Схема разложения силы прижатия
клинчатых катков по рабочим поверхностям
![]()
т. е. формулу прежней структуры (4.8). Коэффициент пропорциональности /пр в этой формуле называют приведенным коэффициентом трения. Он всегда больше фактического коэффициента трения f. Так, например, при а = 15° отношение^ //= 7,66. Во столько же раз увеличивается суммарное нормальное давление Q'z по сравнению с силой прижатия катков Q и уменьшается нагрузка на валы и подшипники.
Фрикционные передачи применяют в приводах небольшой мощности, в частности в конструкциях вариаторов — устройствах для бесступенчатого изменения скорости вращения ведомого катка, одна из конструктивных схем которого представлена на рис. 4.5. Вариатор представляет собой двухступенчатую фрикционную передачу, в которой промежуточный каток является одновременно ведомым для первой ступени и ведущим — для второй. В соответствии с формулой (4.6) передаточное отношение вариатора определится как
■ = 4, d2d2 d&dn С dtf'
где du d2H dn — средние диаметры ведущего, ведомого и промежуточного фрикционных катков по поверхностям их взаимных контактов.
Диаметры dx и d2 могут изменяться бесступенчато в зависимости от изменения угла наклона а оси вращения промежуточного катка. При этом с увеличением первого диаметра уменьшается второй и наоборот. Изменением угла а достигается требуемое передаточное отношение.