

Построение первоначального опорного плана
Как и для других задач линейного программирования, итерационный процесс по отысканию оптимального плана транспортной задачи начинают с нахождения опорного плана.
Рассмотрим систему
ограничений транспортной задачи. Она
содержит
![]() неизвестных и
неизвестных и![]() уравнений, связанных соотношением
уравнений, связанных соотношением![]() т.е., если сложить почленно уравнения
отдельно подсистемы
т.е., если сложить почленно уравнения
отдельно подсистемы![]() и отдельно подсистемы
и отдельно подсистемы![]() ,
то получим два одинаковых уравнения.
Наличие в системе ограничений двух
одинаковых уравнений говорит об её
линейной зависимости. Если одно из этих
уравнений отбросить, то в общем случае
система ограничений должна содержать
,
то получим два одинаковых уравнения.
Наличие в системе ограничений двух
одинаковых уравнений говорит об её
линейной зависимости. Если одно из этих
уравнений отбросить, то в общем случае
система ограничений должна содержать![]() линейно независимых уравнений.
Следовательно, опорный план транспортной
задачи может иметь не более
линейно независимых уравнений.
Следовательно, опорный план транспортной
задачи может иметь не более![]() отличных от 0 неизвестных или перевозок.
отличных от 0 неизвестных или перевозок.
Если в опорном
плане число отличных от нуля компонент
в точности равно
![]() ,
то план является невырожденным, а если
меньше – то вырожденным. Таким образом,
если каким-либо способом получен
невырожденный опорный план транспортной
задачи, то в матрице (
,
то план является невырожденным, а если
меньше – то вырожденным. Таким образом,
если каким-либо способом получен
невырожденный опорный план транспортной
задачи, то в матрице (![]() )
(
)
(![]() )
значений его компонент положительными
являются только
)
значений его компонент положительными
являются только![]() ,
а остальные равны нулю.
,
а остальные равны нулю.
Если условия
транспортной задачи и её опорный план
записаны в виде таблицы, то клетки, в
которых находятся отличные от нуля
перевозки, называются занятыми,
остальные – незанятыми.
Занятые клетки соответствуют базисным
неизвестным и для невырожденного
опорного плана их количество равно
![]() .
Если ограничения транспортной задачи
записаны в виде двух подсистем уравнений,
то, как известно, базисным неизвестным,
включённым в опорный план, соответствует
система линейно независимых векторов.
Опорность плана при записи условий
транспортной задачи в виде таблицы
заключается в егоацикличности,
т.е. в таблице нельзя построить замкнутый
цикл, все вершины которого лежат в
занятых клетках.
.
Если ограничения транспортной задачи
записаны в виде двух подсистем уравнений,
то, как известно, базисным неизвестным,
включённым в опорный план, соответствует
система линейно независимых векторов.
Опорность плана при записи условий
транспортной задачи в виде таблицы
заключается в егоацикличности,
т.е. в таблице нельзя построить замкнутый
цикл, все вершины которого лежат в
занятых клетках.
Циклом называется набор клеток, в котором две и только две соседние клетки расположены в одном столбце или одной строке таблицы, причём последняя клетка находится в той же строке или столбце, что и первая. Построение циклов начинают с какой-либо занятой клетки и переходят по столбцу (строке) к другой занятой клетке, в которой делают поворот под прямым углом и движутся по строке (столбцу) к следующей занятой клетке и т.д., пытаясь возвратиться к первоначальной клетке (рис. 6.1). Если такой возврат возможен, то получен цикл, и план не является опорным. В противном случае план является опорным. Клетки, в которых происходит поворот под прямым углом, определяют вершины цикла.
Для определения опорного первоначального плана существует несколько методов. Рассмотрим два из них: метод северо-западного угла и с учётом наименьших затрат.
Сущность этих
методов, как и других, состоит в том, что
опорный первоначальный план находят
последовательно за
![]() шагов, на каждом из которых в таблице
условий задачи заполняют одну клетку,
которая становится занятой. Лучше
пояснить каждый метод примером.
шагов, на каждом из которых в таблице
условий задачи заполняют одну клетку,
которая становится занятой. Лучше
пояснить каждый метод примером.
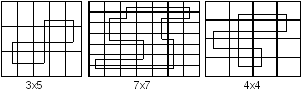


Рис.6.1. Возможные виды циклов в матрице планирования
транспортной задачи
В методе северо-западного угла при нахождении опорного первоначального плана транспортной задачи на каждом шаге рассматривают первый (сверху) из оставшихся пунктов отправления и первый (слева) из оставшихся пунктов назначения. Заполнение клеток таблицы условий начинается с левой верхней клетки для неизвестного x11 ("северо-западный угол") и заканчивается правой нижней клеткой для неизвестного xmn, т.е. идёт как бы по диагонали таблицы.
Таблица 6.2
Начальные условия примера 6.1 транспортной задачи
|
Пункты |
Пункты назначения |
Запасы | ||||
|
отправления |
B1 |
B2 |
B3 |
B4 |
B5 |
|
|
A1 |
2 |
3 |
4 |
2 |
4 |
140 |
|
A2 |
8 |
4 |
1 |
14 |
1 |
180 |
|
A3 |
9 |
7 |
3 |
7 |
2 |
160 |
|
Потребности |
60 |
70 |
120 |
130 |
100 |
80 |
Пример 6.1. Пусть дана транспортная задача, условия которой заданы матрицей планирования, представленной в табл. 6.2. Здесь число пунктов отправления m=3, а число пунктов назначения n=5. Следовательно, опорный план задачи определяется числами, стоящими в 5+3- -1=7 заполненных клетках. Заполнение таблицы начинаем с клетки для неизвестного x11, несмотря на стоимость перевозки, т.е. попытаемся удовлетворить потребности первого пункта назначения за счёт запасов первого пункта отправления.
Так как запасы пункта A1 больше, чем потребности пункта B1, полагаем x11=60, записываем это значение в соответствующей клетке таблицы и временно исключаем из рассмотрения столбец B1, считая при этом запасы пункта A1 равными 80. Рассмотрим первые из оставшихся пунктов отправления A1 и назначения B2. Запасы пункта A1 больше потребностей пункта B2. Положим x12=70, запишем это значение в соответствующей клетке таблицы и временно исключим из рассмотрения столбец B2. В пункте A1 запасы считаем равными 10 единицам. Снова рассматриваем первые из оставшихся пунктов отправления A1 и назначения B2. Потребности пункта B3 больше оставшихся запасов пункта A1. Положим x13=10 и исключим из рассмотрения строку A1. Значение x13=10 запишем в соответствующую клетку таблицы и считаем потребности пункта B3 равными 110 единицам. Теперь перейдём к заполнению клетки для неизвестного x23 и т.д. Через шесть шагов остаётся один пункт отправления A3 с запасом груза 100 единиц и один пункт назначения B5 с потребностью 100 единиц. Соответственно имеется одна свободная клетка, которая и заполняется, полагая x35=100.
В результате получаем опорный план
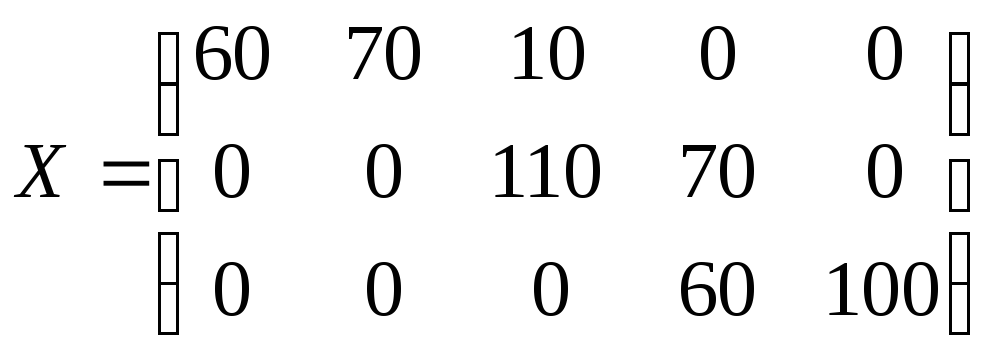 .
.
Таблица 6.3
Последовательность заполнения клеток матрицы планирования
по методу северо-западного угла в примере 6.1
|
В1 |
В2 |
В3 |
В4 |
В5 |
| |
|
А1 |
6 |
70 3 |
1 |
2 |
4 |
140 |
|
А2 |
8 |
4 |
1
1 |
70 |
1 |
180 |
|
А3 |
9 |
7 |
3 |
60 |
2 100 |
160 |
|
Потребности |
60 |
70 |
120 |
130 |
100 |
480 |
 02
02 0
4
0
4  10
10 14
14 7
7
Согласно данному плану перевозок, общая стоимость перевозок составляет

Опорный ли план получен, узнать можно по выполнению условия: если, начиная движение от занятой клетки x11 или какой-то другой занятой, вернуться в неё, двигаясь только по занятым клеткам и делая повороты под прямым углом, невозможно. В приведённом примере план является опорным.
При составлении первоначального опорного плана методом северо-западного угла стоимость перевозки единицы груза не учитывалась, поэтому построенный план далёк от оптимального. Если при составлении опорного плана учитывать стоимость перевозки единицы груза, то, очевидно, план будет значительно ближе к оптимальному.