

методичка 2 семестр интегралы
.pdf
|
|
|
|
Розділ 2. Визначені інтеграли |
31 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x x(t), |
|
|
|
|
|
Pdx Qdy |
|
|
|
t |
t t |
|
|
|||
|
L : |
2 |
|
|
||||
|
y y(t), |
1 |
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
[P(t)x (t) Q(t)y (t)]dt, |
|
||
|
|
|
|
|
t1 |
|
|
|
|
|
|
|
|
P(t) P(x(t), y(t)), |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q(t) Q(x(t), y(t)), |
|
||
|
|
|
|
|
|
|
||
|
L : y y(x), x [a;b] |
|
P(x, y)dx Q(x, y)dy |
|
||||
|
|
|
|
|
|
|||
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
b |
|
|
|
[P(x, y(x)) Q(x, y(x))y (x)]dx
a
Теорема Остроградського — Ґріна.
Якщо L — кусково-гладкий контур, що обмежує на площині Oxy область D, а P(x, y), Q(x,y) C(D) і частинні похідні цих функцій неперервні, то
правдива
формула Остроградського — Ґріна
|
|
|
Q |
|
P |
|
|
|
|
|
|
Pdx Qdy |
|
|
|
|
|
|
|
|
dxdy |
||
L |
|
D |
x |
|
y |
2.14. Застосування криволінійного інтеграла 2-го роду
Робота змінної сили |
|
|
) Pdx Qdy Rdz |
|||||||||
AL(F |
||||||||||||
|
|
|
|
|
|
|
|
L |
|
|||
F (P;Q;R) під час переміщення |
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||
вздовж дуги L |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
Циркуляція векторного поля |
|
|
|
|
|
|
|
|||||
C (F) Pdx Qdy Rdz |
||||||||||||
|
|
|
(P;Q; R) вздовж контуру |
|||||||||
|
a |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||
Площа плоскої області, |
|
|
S |
1 |
|
xdy ydx |
||||||
обмеженої замкненою кривою |
|
|
|
|
|
|||||||
|
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 Розділ 2. Визначені інтеграли
2.15. Криволінійний інтеграл 2-го роду від повного диференціала
Умови незалежності криволінійного інтеграла від шляху інтегрування
Q |
P ; |
R |
Q ; |
P |
|
R |
Pdx Qdy Rdz |
|
x |
y |
y |
z |
z |
|
x |
L |
|
|
|
|
|
|
|
|
не залежить від шляху інтегрування |
|
|
|
|
|
|
|
|||
Pdx Qdy Rdz dU |
|
|
|
Pdx Qdy Rdz 0 L |
||||
є повним диференціалом |
|
|
|
|||||
|
|
|
L |
|
||||
|
|
|
|
|
|
|
|
|
Q |
P |
|
|
|
|
|
Pdx Qdy |
|
x |
y |
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
не залежить від шляху інтегрування |
|
|
|
|
|
|
|
|
||
Pdx Qdy dU |
|
|
|
|
Pdx Qdy 0 L |
|||
є повним диференціалом |
|
|
|
|||||
|
|
|
L |
|
||||
|
|
|
||||||
Інтеграл від повного диференціала |
|
dU U(B) U(A) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB |
|
|
|
|
|
||||
Відновлення функції за її |
|
|
|
x |
||||
диференціалом |
|
|
|
|
U(x, y, z) P(t, y0, z0 )dt |
|||
|
dU Pdx Qdy Rdz |
|
|
x0 |
||||
|
|
|
|
|
|
|
y |
z |
|
|
|
|
|
|
|
Q(x, t, z0 )dt R(x, y, t)dt C |
|
|
|
|
|
|
|
|
y0 |
z0 |
|
|
|
|
|
||||
Відновлення функції за її |
|
|
|
U(x, y) |
||||
диференціалом |
|
|
|
|
x |
y |
||
|
dU Pdx Qdy |
|
|
|
P(t, y0 )dt Q(x, t)dt C |
|||
|
|
|
|
|
|
|
x0 |
y0 |
|
|
|
|
|
|
|
|
|
Розділ 2. Визначені інтеграли |
33 |
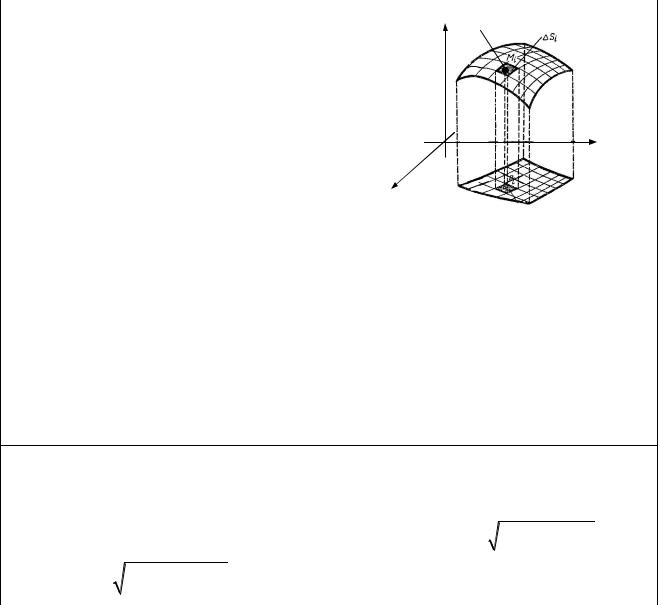
2.16. Поверхневі інтеграли 1-го роду (за площею поверхні)
Поверхневий інтеграл 1-го роду від |
|
z |
Mi( i ; i ; i ) |
||||||||
функції f (x, y, z) за поверхнею |
|
|
|
|
|
|
i |
|
|||
|
|
|
|
|
|
|
|||||
|
f (x, y, z)d |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lim |
f ( i, i, i ) i, |
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|||
|
max di 0 i 1 |
|
|
|
|
|
|
|
|
||
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де i |
— площа ділянки; di — її діаметр. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
Геометричний зміст поверхневого |
|
|
|
|
|
|
|
|
|
||
інтеграла 1-го роду. Маса, |
|
f (x, y, z)d m( ) |
|||||||||
розподілена на поверхні з густиною |
|
||||||||||
f (x, y, z) 0 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Основні властивості поверхневого інтеграла 1-го роду
1)1 d S( ) (площа ); 2) лінійність; 3) адитивність.
Обчислення поверхневого інтеграла 1-го роду.
Поверхня : z z(x, y) |
f (x, y, z)d |
||||||
однозначно проектується в область |
|||||||
|
|
|
|||||
DOxy |
|
|
|
f (x, y, z(x, y)) |
1 zx2 zy2dxdy |
||
|
|
|
|
DOxy |
|
|
|
|
|
|
|
|
|
||
d |
1 z 2 |
z 2dxdy |
|
|
|||
|
x |
y |
|
|
|
||
|
|
|
|
|
|
|
|
2.17. Застосування поверхневого інтеграла 1-го роду
Площа поверхні |
S( ) d |
|
|
|
|
Маса розподілена на поверхні |
m( ) (x, y, z)d |
з густиною (x, y, z) |
|
|
|
|
34 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Розділ 2. Визначені інтеграли |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Статичні моменти поверхні |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
щодо координатних площин |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
xy |
|
|
|
|
|
|
(x, y, z)d |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
M |
|
|
|
|
|
|
|
y |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Координати центра мас |
x |
|
Myz |
;y |
Mxz |
; z Mxy |
|
|||||||||||||||||||||||||||||||||||
|
поверхні |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
m |
|
|
|
|
c |
|
|
|
|
m |
c |
m |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Моменти інерції поверхні |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
щодо координатних площин |
|
I |
xy |
|
|
|
|
2 |
(x, y, z)d |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
y |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Моменти інерції поверхні |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
z |
2 |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
щодо осей координат |
Ox |
|
|
|
|
|
|
z |
2 |
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
I |
|
|
|
|
|
|
|
x |
|
|
|
(x, y, z)d |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Oy |
|
|
|
|
|
|
|
|
y2 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Oz |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Момент інерції поверхні |
IO (x2 |
|
y2 z2) (x, y, z)d |
|
||||||||||||||||||||||||||||||||||||||
|
щодо початку координат |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2.18. Поверхневі інтеграли 2-го роду |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
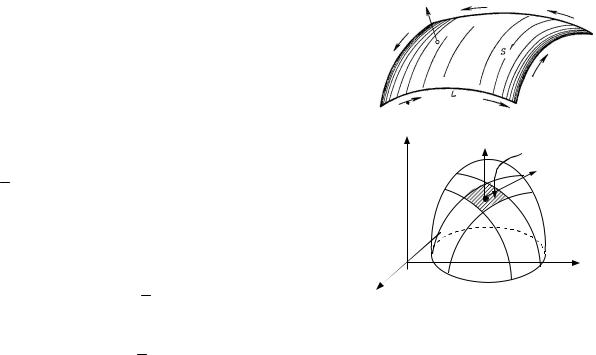
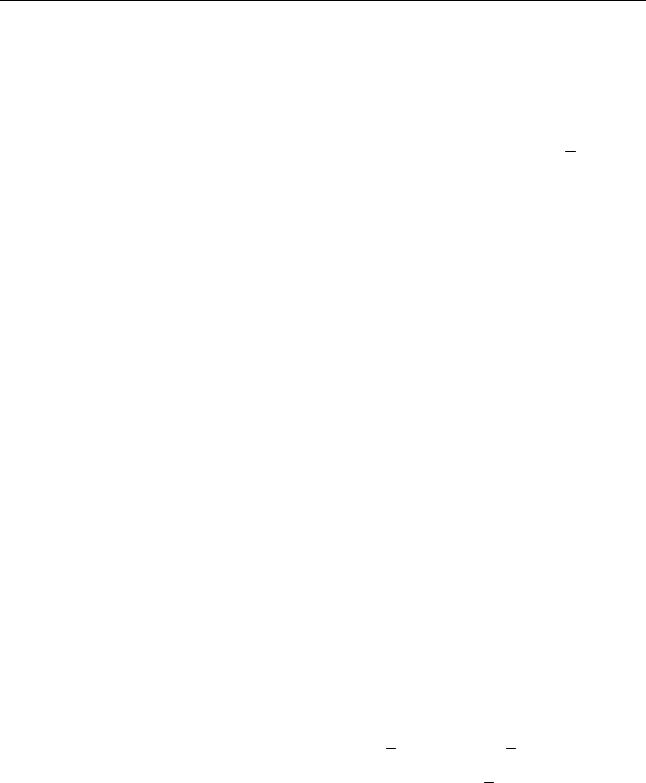
|
Орієнтовані поверхні. Поверхню |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
, у кожній точці якої вказано |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
нормальний вектор |
|
|
|
й напрям обходу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
контуру , |
називають орієнтованою. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поверхневий інтеграл 2-го роду |
|
|
|
|
|
|
z |
|
|
|
|
|
|
0 |
|
|
|
|
i |
|
|
|
||||||||||||||||||||
|
від вектор-функції |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Mi ) |
|
||||||||||||
|
|
P(x, y, z) |
|
Q(x, y, z) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|||||||||||||
|
a |
i |
j |
R(x, y, z)k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mi |
|
|||||||||||||||||||||
|
за вибраним боком поверхні |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
Pdydz Qdxdz Rdxdy |
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
(a |
, |
|
|
0)d |
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
n |
де i |
— площа ділянки; |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
n |
di — її діаметр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
lim |
|
(a |
(Mi ), |
|
0(Mi )) i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
max d |
0 |
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Розділ 2. Визначені інтеграли |
35 |
Фізичний зміст поверхневого |
(a, n |
0 |
)d (a ) |
|||||
|
|
|
|
|
|
|
||
інтеграла 2-го роду. Потік векторного |
|
|
|
|
|
|||
поля через вибраний бік поверхні |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Основні властивості поверхневого інтеграла 2-го роду
1)(a, n0 )d (a, n 0 )d (орієнтованість);
|
|
|
|
2) лінійність; 3) адитивність.
Обчислення поверхневого інтеграла 2-го роду
Проектування поверхні
: F(x, y, z) 0
на всі координатні площини
(знаки перед подвійними інтегралами відповідають знакам напрямних
косинусів вибраної нормалі n grad F )
Pdydz Qdxdz Rdxdy
P(x(y, z), y, z)dydz
DOyz
Q(x, y(x, z), z)dxdz
DOxz
R(x, y, z(x, y))dxdy
DOxy
Проектування поверхні : z z(x,y) на площину Oxy
|
|
|
|
|
|
|
|
0 ) |
|
|||
|
|
, |
|
0 )d |
(a |
, n |
dxdy |
|||||
(a |
n |
|||||||||||
cos |
|
|||||||||||
|
|
|
|
D |
|
z z(x,y) |
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Oxy |
|
|
|
|
|
|
|
|
Знак перед інтегралом відповідає знаку cos вибраної нормалі n до поверхні.
Pdydz Qdxdz Rdxdy
|
|
|
|
[P(x, y)( zx ) Q(x, y)( zy ) |
|
DOxy
R(x, y)]dxdy
P(x, y) P(x, y, z(x, y)),
Q(x, y) Q(x, y, z(x, y)),
R(x, y) Q(x, y, z(x, y))
Теорема Остроградського — Ґауса.
Якщо векторне поле
a Pi Qj Rk неперервно диференційовне у просторовій області G, обмеженій замкненою поверхнею, орієнтованою зовнішньою нормаллю, то правдива
формула Остроградського — Ґауса
Pdydz Qdxdz Rdxdy
|
|
P |
|
Q |
|
R |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
dxdydz |
|||
|
|
x |
|
y |
|
|
|
G |
|
|
z |
||
36 Розділ 2. Визначені інтеграли
2.19. Скалярні поля
Скалярне поле |
|
u(M) u(x, y, z), M G 3 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Поверхня рівня |
|
|
u(x, y, z) C const |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Градієнт |
grad u |
u |
|
u |
|
|
u k |
|
||||||||||
i |
j |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
x |
y |
|
z |
||||||
|
|
|
|
|
|
|
||||||||||||
Правила обчислення градієнта |
4) |
grad(uv) v grad u u grad v; |
||||||||||||||||
1) |
gradC |
|
|
|
|
|
grad |
u |
|
v grad u u grad v |
; |
|||||||
0,C const; |
5) |
|||||||||||||||||
|
|
|
|
|
|
v |
|
|
|
|||||||||
2) |
grad(Cu) C grad u,C const; |
|
|
|
|
|
v2 |
|
|
|
|
|||||||
3) |
grad(u v) grad u grad v; |
6) |
grad f(u) f (u) grad u |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
Похідна за напрямом |
|
0 |
|
|
|
u |
|
|
|
|
|
|
|
|||||
l |
|
|
|
(grad u, |
|
0 ) |
||||||||||||
|
|
|
l |
|||||||||||||||
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.20. Векторні поля
Векторне поле |
|
|
|
(M) P(x, y, z)i |
|
|
|
||||||||||||||||||||||||||||||||
|
a |
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q(x, y, z) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
R(x, y, z)k |
, |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M G 3 |
|
|
|
|
|
|
|||||||||||||
Векторна (силова) лінія. |
|
|
|
|
|
|
|
dx |
|
dy |
|
dz |
|
|
|
|
|
|
|||||||||||||||||||||
Векторною лінією поля |
|
називають |
|
|
|
|
|
|
|
P |
Q |
R |
|
|
|
|
|
|
|||||||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
криву, в кожній точці M якої дотична |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
збігається з напрямом поля |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Дивергенція |
|
|
|
|
|
|
|
|
|
|
|
P |
Q |
R |
|||||||||||||||||||||||||
векторного поля |
|
div a |
x |
y |
z |
||||||||||||||||||||||||||||||||||
Правила обчислення дивергенції |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
3) div( |
a1 |
|
|
|
2 ) div |
a1 div |
|
2; |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
|||||||||||||||||||||||||
1) divC |
0,C const; |
||||||||||||||||||||||||||||||||||||||
2) div(Ca ) C div |
|
,C const; |
4) div(ua ) u div a |
( |
|
, grad u) |
|||||||||||||||||||||||||||||||||
|
a |
||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Фізичний зміст дивергенції |
1) якщо div |
|
|
|
|
0 — то div |
|
|
|
|
— |
||||||||||||||||||||||||||||
a |
a |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
потужність джерела; |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2) якщо div |
|
0 — то div |
|
|
|
— |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
потужність стоку |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Розділ 2. Визначені інтеграли |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ротор векторного поля |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
j |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rot F |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
y |
|
|
|
z |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
Q |
|
|
|
R |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Правила обчислення ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3) |
rot(ua ) u rota |
[grad u, |
|
] |
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
1) rotC 0,C const; |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
2) rot(a1 |
|
2 ) rot |
a1 rot |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
a |
a2; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
Потік векторного поля |
|
|
|
|
|
|
|
( |
|
|
|
) (a |
, |
|
|
|
|
|
|
0 )d |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
a |
n |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Циркуляція векторного поля |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
CL(a ) |
(a, |
)dl |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
Формула Остроградського — |
|
(a, n |
0 |
)d div adxdydz |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Ґауса. Потік векторного поля |
|
|
через |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
замкнену поверхню , в напрямі її |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
зовнішньої нормалі, дорівнює |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
потрійному інтегралу від дивергенції |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
векторного поля за областю G, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
обмеженої цією поверхнею. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
( |
|
— неперервно диференційовне |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
поле всередині області G) |
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
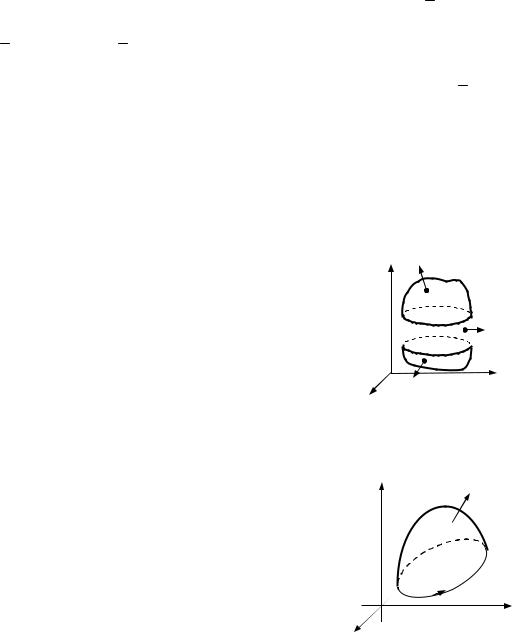
|
Формула Стокса. Циркуляція |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|||||||||||||||||||||||
|
|
|
(a, |
)dl |
|
(rota, n |
)d |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
векторного поля |
|
|
уздовж довільного |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
a |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
замкненого контуру L дорівнює |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
потоку вектора rot a через поверхню |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
, напнуту на контур L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
( |
|
— неперервно диференційовне |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
поле на поверхні ; орієнтація кривої |
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
узгоджена з орієнтації поверхні ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

38 Розділ 2. Визначені інтеграли
2.21. Спеціальні векторні поля
Потенціальне поле |
|
|
|
|
|
|
rot |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Потенціал U потенціального |
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
поля |
|
|
|
|
|
|
|
|
|
|
U(x, y, z) P(t, y0, z0 )dt |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
Pi |
Qj |
Rk , |
|
|
|
|
|
|
|
|
x0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
U : |
|
(M) gradU(M) |
y |
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
a |
Q(x, t, z0 )dt R(x, y, t)dt C |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y0 |
|
|
|
|
|
z0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Соленоїдальне поле |
|
|
|
|
|
|
div |
|
|
|
|
0 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Гармонічне поле |
rot |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
0, div |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
a |
a |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
2.22. Символічний запис дій над полями |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Оператор Гамілтона (набла) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
i |
|
|
|
|
j |
|
k |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Оператор Лапласа |
2 |
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
y2 |
|
z2 |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
Диференціальні операції 1-го порядку |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Градієнт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
grad u u |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
Дивергенція |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( , |
|
|
|
) |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
div a |
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
Ротор |
|
|
|
|
|
|
|
|
|
|
|
|
|
rot |
|
|
|
|
[ , |
|
|
|
|
] |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
Диференціальні операції 2-го порядку |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
rot grad u |
, u |
0 |
|
|
div rot |
a |
|
( ,[ ,a |
]) 0 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
div grad u ( , u) u |
grad div a |
( , |
|
|
|
) |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
rot rot |
|
|
[ ,[ , |
|
|
]] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
a |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
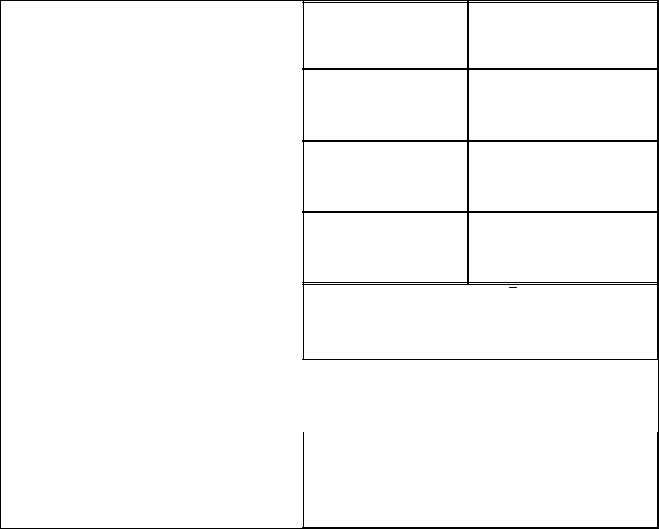
Розділ 2. Визначені інтеграли |
39 |
2.23. Застосування інтегралів за геометричними об’єктами
Об’єкт |
|
Тип інтеграла |
|
|
|
Область |
А |
Подвійний інтеграл |
на площині |
|
f(x,y)dxdy |
|
|
|
|
|
D |
|
|
|
Просторова |
Б |
Потрійний інтеграл |
область |
|
f(x,y, z)dxdydz |
|
|
|
|
|
G |
|
|
|
Крива |
В |
Криволінійний інтеграл |
|
|
І роду f(x,y, z)dl |
|
|
L |
|
|
|
Крива |
Г |
Криволінійний інтеграл |
|
|
ІІ роду Pdx Qdy Rdz |
|
|
L |
|
|
|
Поверхня |
Д |
Поверхневий інтеграл |
|
|
І роду f (x,y, z)dS |
|
|
|
|
|
|
Поверхня |
Е |
Поверхневий інтеграл |
|
|
ІІ роду |
|
|
Pdydz Qdxdz Rdxdy |
|
|
|
|
|
|
Геометричне
застосування
1
Площа області D
S(D) dxdy
D
Об’єм тіла G
V(G) dxdydz
G
Довжина кривої L
l(L) dl
L
Фізичне
застосування
2
Маса пластинки D
m(D) (x,y)dxdy
D
Маса тіла G
m(G) (x,y,z)dxdydz
G
Маса кривої L
m(L) (x,y, z)dl
L
Робота змінної сили F (P;Q; R)
A Pdx Qdy Rdz
L
Площа поверхні |
|
Маса поверхні |
|||||
S( ) dS |
|
|
m( ) (x,y,z)dS |
||||
|
|
|
|
||||
|
|
|
|
|
|||
Потік поля |
|
(P;Q; R) через поверхню |
|||||
a |
|||||||
|
|
|
|
|
|
|
|
|
(a |
) |
|
Pdydz Qdxdz Rdxdy |
|||

Розділ 3. ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ
3.1. Диференціальні рівняння 1-го порядку
Диференціальне рівняння (ДР) 1-го |
Задача Коші для ДР 1-го порядку. |
||||||||
порядку. |
|
|
|
|
|
|
Задачу знаходження розв’язку |
||
|
|
|
|
|
|
|
|
рівняння y f(x, y), |
|
|
|
|
|
|
|
dy |
|
||
|
|
|
|
|
|
||||
y |
f (x, y), |
|
y |
dx |
|
який справджує початкову умову |
|||
|
|
|
|||||||
P(x, y)dx Q(x, y)dy 0 |
y(x0 ) y |x x0 y0, |
||||||||
|
|
|
|
|
|
|
|
називають задачею Коші. |
|
|
|
||||||||
Загальний, частинний і особливий |
Загальний розв’язок у неявному |
||||||||
розв’язки ДР. Сукупність функцій |
вигляді (x, y,C ) 0 називають |
||||||||
y y(x,C ), де C — довільна стала, |
загальним інтегралом ДР. |
||||||||
називають загальним розв’язком ДР |
Частинним розв’язком ДР y f (x, y) |
||||||||
y f (x, y), якщо: |
|
|
|
|
|||||
|
|
|
|
називають розв’язок, який дістають із |
|||||
|
|
|
|
|
|
|
|
||
1) функція y y(x,C ) |
|
є розв’язком |
загального розв’язку за певного |
||||||
цього ДР для будь-якого значення C ; |
значення довільної сталої C. |
||||||||
2) для будь-якої початкової умови |
Розв’язок ДР, який не можна одержати |
||||||||
із загального розв’язку, за жодного |
|||||||||
y(x0) y0 існує єдине значення |
|||||||||
значення довільної сталої, включаючи |
|||||||||
C C0 |
таке, що функція y y(x,C0 ) |
, називають особливим. |
|||||||
справджує цю умову. |
|
|
|
|
|
||||
|
|
||||||||
Теорема про існування та |
|
||||||||
єдиність розв’язку задачі Коші. Якщо |
|
||||||||
у ДР y |
f(x, y) функція f (x, y) та її |
то існує єдиний розв’язок y (x) |
|||||||
похідна f |
(x, y) неперервні в деякій |
||||||||
цього рівняння, який справджує |
|||||||||
|
y |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
області D, |
яка містить точку |
початкову умову y(x0 ) y0. |
M0(x0;y0), |
|
|
|
|