Методички / Курс деталей машин
.pdfРабочее изгибное напряжение зубьев солнечного колеса:
F1 = YF1Ft KF KFν/(b1m) = 3,9·1408·1,07·1,4/(24·4) = 85,7 МПа.
Изгибное напряжение зубьев сателлитов:
F2 = F1YF2/YF1 = 85,7·4,09/3,9 = 89,9 МПа.
Изгибное напряжение зубьев корончатого колеса:
F3 = F1YF3/ YF1 = 85,7·3,06/3,9 = 67,2 МПа.
Вывод. Изгибная прочность достаточна, так как рабочие изгибные напряжения меньше допускаемого напряжения F = 257 МПа.
Неуравновешенная сила, действующая на вал водила:
Fh = 0,2·2T1/(d1cosα) =0,2·2·161,9·103 /(100·cos20º) = 689 Н.
Сила, действующая на оси сателлитов:
F2h = 2Ft = 2·1408 = 2816 Н.
Частота вращения сателлитов:
n2h (n1 nh )z1 / z2 (646,7 182,2) 25 / 20 580,6об / мин.
Вопросы для самоподготовки
1.Каковы достоинства и недостатки планетарных передач и области их применения?
2.Чем обосновывается более высокая нагрузочная способность планетарных передач по сравнению с простыми?
3.Назовите звенья планетарного механизма.
4.Чем отличаются передаточное отношение и передаточное число в планетарной передаче?
5.Какие принимаются конструктивные меры по выравниванию нагрузки по сателлитам?
6.Каковы особенности расчёта планетарных передач по сравнению с простыми?
Вопросы, выносимые на экзамен
1.Планетарные передачи. Оценка и применение. Кинематические схемы.
2.Планетарные передачи. Силовые зависимости. Особенности расчёта на прочность.
Экзаменационная задача
Задача №38
Рассчитать межосевое расстояние и модуль простого планетарного
редуктора. Вычертить кинематическую схему редуктора.
Наименование параметра |
|
|
Вариант |
|
|
||
1 |
2 |
3 |
4 |
5 |
6 |
||
|
|||||||
Мощность Р1, кВт |
7 |
11 |
16 |
20 |
25 |
28 |
|
Частота вращения n1, об/мин |
1460 |
2880 |
960 |
1462 |
2919 |
1470 |
|
Число зубьев z1 |
36 |
20 |
20 |
48 |
28 |
30 |
|
z2 |
18 |
20 |
30 |
24 |
42 |
30 |
|
z3 |
72 |
60 |
80 |
96 |
112 |
90 |
|
Число сателлитов nc |
3 |
4 |
5 |
3 |
4 |
5 |
|
Окружная скорость υ, м/с |
6 |
8 |
10 |
5 |
12 |
7 |
|
Допускаемое контактное напряжение [ Н], МПа |
500 |
450 |
900 |
400 |
600 |
1000 |
|
Примечание. Недостающими данными задаться.
Тема 20: Передача винт-гайка
20.1. Кинематика и силовые соотношения
Передача винт-гайка служит для преобразования вращательного движения в поступательное. Возможно и обратное преобразование при угле подъёма винтовой линии > 12 . В передачах используют пары винт-гайка трения скольжения или качения. Передачи скольжения имеют широкое применение вследствие простоты конструкции и отработанной технологии получения резьбы.
В целях повышения КПД используют резьбы с пониженным коэффициентом трения: трапецеидальную с рабочим углом профиля α = 15º и

Таким образом, передача винт-гайка позволяет получать большой выигрыш
в силе.
20.2. Оценка и применение
Достоинства:
1.Простота конструкции.
2.Высокая надёжность, плавность и точность хода.
3.Большое условное передаточное отношение, позволяющее иметь большой выигрыш в силе.
4.Возможность самоторможения.
Недостатки:
1. |
Большое трение в резьбе, что определяет: |
2. |
Высокий износ. |
3. |
Низкий КПД. |
В соответствии с изложенными достоинствами простая и надёжная |
|
конструкция передачи используется: |
|
1. |
Как силовая в грузоподъёмных механизмах, приводах систем управления |
и т.п., где реализуется выигрыш в силе. |
|
2. |
В кинематических передачах, где требуются точные перемещения – в |
механизмах настройки и измерительных приборах. |
|
В |
силовых механизмах наибольшее распространение получила |
трапецеидальная резьба, в механизмах прессов и прокатных станов – упорная резьба, в механизмах приборов – метрическая. В машинах специальности ПСДМ винтовые механизмы применяются:
–в противоугонных механизмах башенных и козловых кранов;
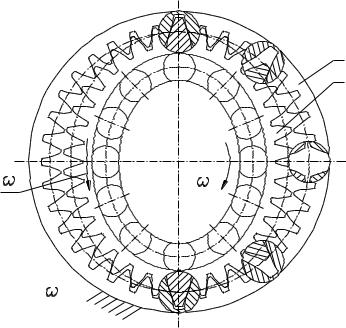
–в механизмах подъёма электромагнитов ВПО-3000, раскрытия крыльев стругов и дозаторов (рис. 20.2);
–во вспомогательных устройствах строительных и дорожных машин, в
домкратах и в других устройствах.

Впоследние годы получили распространение шарико-винтовые механизмы,
вкоторых между винтом и гайкой размещаются шарики. Механизмы имеют высокий КПД, так как приведенный коэффициент трения f = 0,005…0,01.
M
Рис. 20.2. Червячно-винтовая передача
20.3. Расчёт на износостойкость
Основным критерием работоспособности и расчёта ходовой резьбы является износостойкость. В целях уменьшения износа применяют
антифрикционные пары материалов: сталь – чугун, сталь – бронза и др. Для винтов применяют конструкционные углеродистые и легированные стали (стали
45, 50, 40Х, 65Г и др.), улучшенные, закалённые или азотированные. Гайки в ответственных изделиях выполняют из оловянистых бронз, например, из бронзы БО10Ф1.
Работоспособность передачи по износу оценивают условно по среднему давлению на рабочих поверхностях витков (рис. 20.3):
p |
Fa |
[ p], |
(20.4) |
d2 hz |
где h – рабочая высота профиля резьбы; z – число витков.
Для проектного расчёта формулу (20.4) преобразовывают, вводя обозначения:
H = H/d2 – коэффициент высоты гайки;
h = h/Ph – коэффициент высоты резьбы.
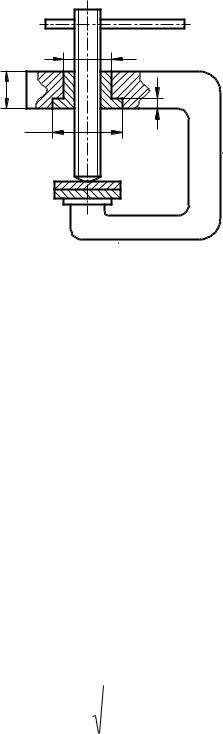
|
D |
H |
|
D1 |
δ |
Рис. 20.3. Винтовой пресс
Принимают H = 1,2…2,5. В ходовых винтовых парах неравномерность распределения нагрузки по виткам выравнивается вследствие приработки резьбы.
Поэтому здесь допускают более высокие гайки, чем в крепёжных изделиях.
Принимают коэффициент h = 0,5 – для трапецеидальной и прямоугольной резьб; h = 0,75 для упорной резьбы. Допускаемое давление [р] = 11…13 МПа для пары закалённая сталь – бронза; для пары незакалённая сталь – бронза [р] = 7…8
МПа; незакалённая сталь – чугун [р] = 5 МПа.
B формулу (20.4) вводят z |
|
H |
H d : |
|
|
||||||||||
|
|
|
|
||||||||||||
|
|
|
|
|
Ph |
|
Ph |
|
|
|
|
|
|
||
p |
Fa Ph |
|
|
|
|
Fa |
|
|
|
|
[ p], |
|
откуда: |
||
d |
P H |
d |
H |
d |
2 |
|
|||||||||
|
2 |
h h |
|
|
|
2 |
h |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
Fa |
|
. |
(20.5) |
|
|
|
|
|
2 |
h H [ p] |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
По среднему диаметру принимают стандартную резьбу. Высота гайки Н =
Нd2. После расчёта резьбы на износостойкость при необходимости рассчитывают винты на прочность и устойчивость, а элементы гайки – на сжатие, срез и смятие.
Пример 20.1. Определить диаметр трапецеидальной резьбы передачи винт-
гайка по следующим исходным данным: осевая нагрузка Fa = 3000 Н.
Недостающими данными задаться.
Решение.

Принимаем антифрикционную пару закалённая сталь - бронза с допускаемым давлением [р] = 12 МПа. Коэффициент высоты резьбы h = 0,5.
Коэффициент высоты гайки принимаем H = 1,5. Средний диаметр резьбы:
d2 |
|
3000 |
|
|
10,3мм. |
|
|
|
|
|
|||
0,5 1,5 |
|
|||||
|
|
12 |
||||
Принимаем резьбу Tr12×3 c наружным диаметром d = 12 мм, внутренним диаметром d2 = 10,5 мм и шагом P = 3 мм.
Вопросы для самоподготовки
1.Как работает передача винт-гайка?
2.Какие материалы применяют в передаче?
3.Какие резьбы используются в передаче?
4.Каковы достоинства передачи винт-гайка?
5.По какому критерию и по какому параметру рассчитывают передачу винт-
гайка?
Вопросы, выносимые на экзамен
1.Передачи винт-гайка. Кинематика и силовые соотношения.
2.Передачи винт-гайка. Оценка и применение. Особенности расчета не износостойкость.
Экзаменационная задача
Задача №39
Рассчитать винт домкрата на износостойкость. Привести эскиз с
обозначением резьбы.
Наименование параметра |
|
|
Вариант |
|
|
||
1 |
2 |
3 |
4 |
5 |
6 |
||
|
|||||||
Осевая нагрузка Fa, кН |
20 |
25 |
30 |
40 |
50 |
60 |
|
Вид резьбы (1 – трапецеидальная, 2 – упорная) |
1 |
2 |
1 |
1 |
2 |
1 |
|
Материал винта (1 – закалённая сталь, 2 – незакалённая сталь) |
1 |
2 |
2 |
2 |
1 |
1 |
|
Материал гайки (1 – бронза, 2 – чугун) |
1 |
1 |
2 |
2 |
2 |
1 |
|
Примечание. Недостающими данными задаться.
Лекция №20
Тема 21: Волновые зубчатые передачи
21.1. Принцип работы
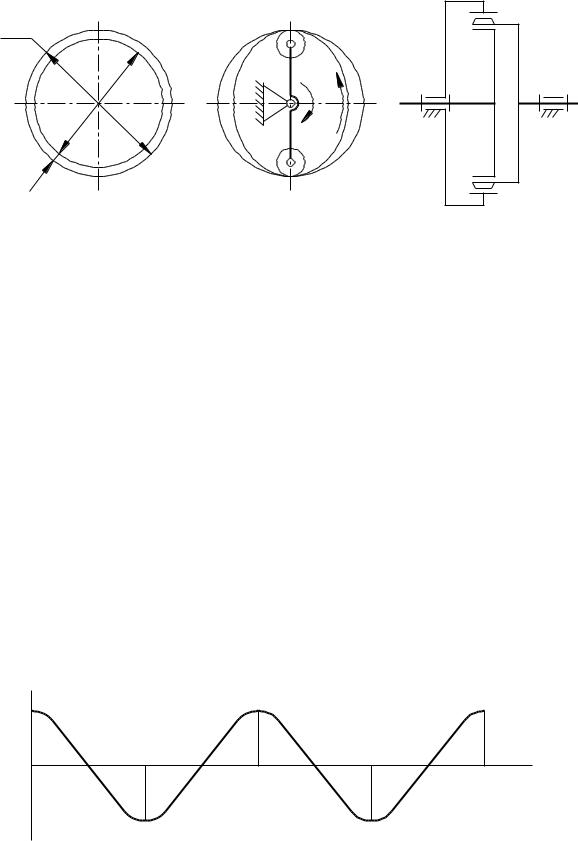
Волновая передача – механизм, в котором движение между звеньями передаётся перемещением волны деформации одного из звеньев. Передачу можно рассматривать как разновидность планетарной передачи типа k–h–v (рис. 21.1),
имеющей водило h в виде волнового генератора, жёсткого колеса b с внутренними зубьями и одного, двух или трёх сателлитов (количество волн), совмещённых с универсальным двойным шарниром в виде гибкого колеса g c наружными
зубьями (рис. 21.2, в).
b
h g
Рис. 21.1. Передача типа k–h–v
Принцип волнового деформирования был предложен А.И. Москвитиным в
1944 г. для фрикционной передачи с электромагнитным генератором волн.
В. Массером (США) в 1959 г. волновой принцип был развит в виде зубчатой передачи с механическим генератором волн, которая и получила наибольшее применение.
Волновая зубчатая передача (ВЗП) представляет собой передачу внутреннего зацепления двух соосных прямозубых колёс (рис. 21.2, а).
Делительные диаметры колёс различаются на величину 2w0: |
|
db dg w , |
(21.1) |