

4.2. Вычисление интегральных и усредненных значений измеряемых величин
При вычислении интеграла (4.1) чаще всего используют методы прямоугольников и трапеций.
Метод прямоугольников (рис. 4.1) основан на аппроксимации непрерывной функции х(t) кусочно-постоянной функцией, как при использовании экстраполятора нулевого порядка (см. разд. 3.2). При этом

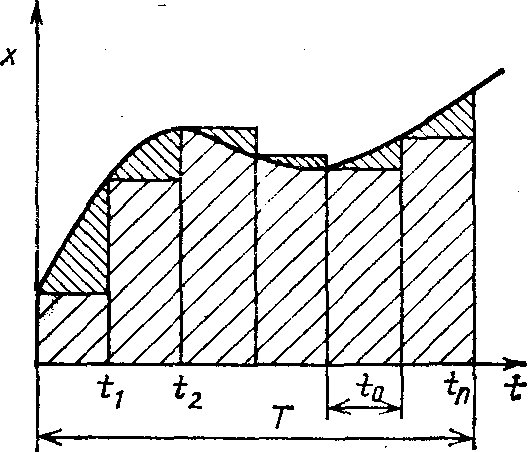
Рис. 4.1. Дискретное интегрирование Рис. 4.2. Дискретное интегрирование
по методу прямоугольников по методу трапеций
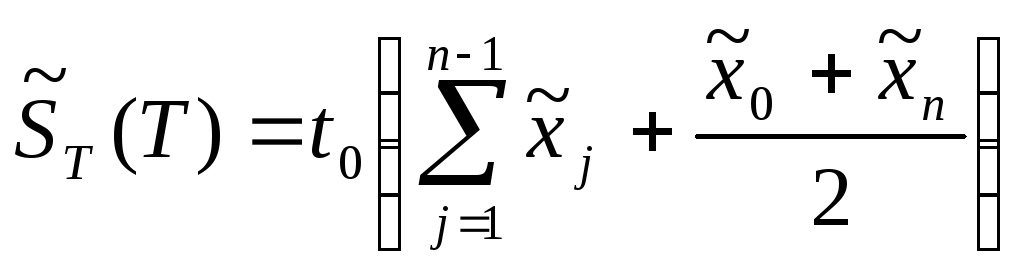
оценку величины Sx (Т) с учетом погрешностей измерения определяют по формуле
![]() ,
(4.4)
,
(4.4)
где
![]() ;
(4.5)
;
(4.5)
xj=x(jt0)
— значение
параметра x
в момент tj=jt0,
![]() ;
xj
- погрешность измерения параметра х
в момент tj;
n=T/t0
- число
периодов отсчета величины х(t)
на
отрезке времени интегрирования Т.
;
xj
- погрешность измерения параметра х
в момент tj;
n=T/t0
- число
периодов отсчета величины х(t)
на
отрезке времени интегрирования Т.
Рекуррентная
формула для вычисления оценки
![]() в
темпе с поступлением отсчетов
в
темпе с поступлением отсчетов![]() ,
имеет вид:
,
имеет вид:
![]() (j)=
(j)=
![]() (j-1)+
(j-1)+
![]() t0
, 0
jn-1,
t0
, 0
jn-1,
![]() (0)=0.
(4.6)
(0)=0.
(4.6)
Погрешность оценки DSп равна разности между результатами расчета Sx (Т) формулам (4.4) с учетом (4.5) и (4.1):
DSп
 .
(4.7)
.
(4.7)
В правой части полученного выражения можно выделить инструментальную составляющую DSпи, зависящую только от погрешностей измерения xj:
![]() .
(4.8)
.
(4.8)
Остаток правой части выражения (4.7) описывает методическую составляющую DSпм погрешности оценки DSп, определяемую численным методом интегрирования и называемую методической погрешностью:
DSпм
 .
(4.9)
.
(4.9)
Среднюю квадратичную погрешность оценки DSп получают возведением в квадрат и усреднением выражения (4.7). С учетом (4.9) получают
 (4.10)
(4.10)
Первое слагаемое в правой части уравнения (4.10) есть средний квадрат инструментальной составляющей погрешности оценки. В силу линейности операций суммирования и вычисления математического ожидания их можно поменять местами. Тогда
![]() ,
(4.11)
,
(4.11)
где Rx(t) - автокорреляционная функция погрешности измерения.
Формула (4.11) упрощается, если погрешность измерения не изменяется в пределах интервала времени интегрирования Т, т. е. если xj=xk при любых j и k от 0 до (п—1). В этом случае
![]() ,
(4.12)
,
(4.12)
где x - средняя квадратичная погрешность измерения.
Кроме того, если автокорреляционная функция погрешности измерения затухает за время t0, т. е. Rx(t)=0 при tt0, то
![]()
В этом случае
![]() .
(4.13)
.
(4.13)
Второе слагаемое в правой части выражения (4.10) равно нулю, так как погрешности измерений xj, можно считать независимыми от значений хj, т. е. инструментальная и методическая составляющие погрешности оценки не коррелированы.
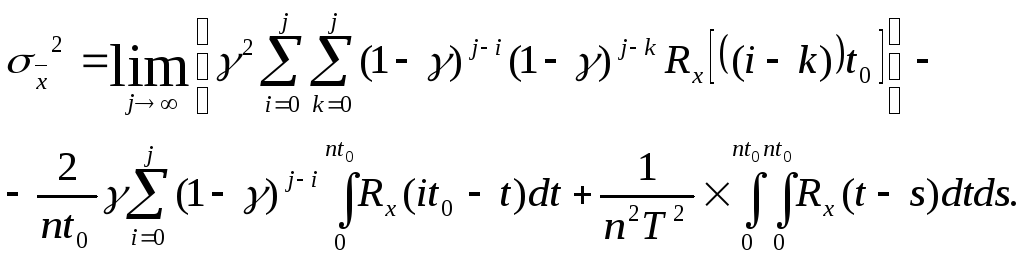
Последний член в правой части выражения (4.10) описывает средний квадрат методической погрешности 2пм дискретного интегрирования по методу прямоугольников. Формула для расчета 2пм, полученная возведением в квадрат и последующим усреднением 'правой части (4.9), имеет вид [34]:
2пм , (4.14)
, (4.14)
где Rx() - автокорреляционная функция процесса х(t).
Если период опроса t0 превышает время затухания автокорреляционной функции Rx(), т. е. Rx( )0 при t0, то формула (4.14) упрощается:
s2пм .
(4.14а)
.
(4.14а)
Метод трапеции (рис. 4.2) основан на аппроксимации непрерывной функции х(t) кусочно-линейной функцией, как в методе линейной интерполяции (см. разд. 3.2). Оценку величины S(Т) по этому методу рассчитывают по формуле:
 .
(4.15)
.
(4.15)
В
рекуррентной форме алгоритм вычисления
оценки
![]() в темпе с поступлением измеренных
значений
в темпе с поступлением измеренных
значений![]() описывается
формулой
описывается
формулой
 1
jn;
1
jn;
![]() =0.
(4.16)
=0.
(4.16)
Формулу погрешности оценки DST получают аналогично формуле (4.7), как разность правых частей (4.15) и (4.1) с учетом (4.5). Ее можно представить в виде:
DST =DSТИ+DSТМ (4.17)
где DSТИ - инструментальная составляющая погрешности, которая совпадает а (4.8); DSТМ - методическая составляющая погрешности DST, которая описывается выражением
DSТМ . (4.18)
. (4.18)
Среднюю квадратичную методическую погрешность дискретного интегрирования по методу трапеций s2пм получают возведением в квадрат и последующим усреднением правой части (4.18). Сопоставление полученного при этом выражения с формулой (4.14) показывает, что методическая погрешность при использовании метода трапеций уменьшается по сравнению с полученной методом прямоугольников на величину
s2м=s2пм
- s2тм=![]() .
(4.19)
.
(4.19)
В большинстве случаев Rx(Т)=0. Поэтому
s2м![]() (4.19 а)
(4.19 а)
Как показывают расчеты [24], заметное (примерно на 10%) уменьшение погрешности дискретного интегрирования при переходе от метода прямоугольников к методу трапеций происходит только при n10, когда существенное влияние на результат расчета оказывают крайние члены выборки измеренной величины (первый и последний). Поэтому на практике в большинстве случаев применяют метод прямоугольников как более простой и экономичный.
Расчет среднего значения измеряемого параметра х(t) на заданном интервале 0 t T, как следует из формулы (4.2), сводится к вычислению интегрального значения Sx(Т), для чего может быть использован любой из описанных выше методов дискретного интегрирования. При этом остаются справедливыми все расчетные соотношения, только в формулы (4.11)— (4.14) и (4.19) для вычисления средних квадратических погрешностей необходимо ввести дополнительный множитель (nt0)-2.
При оперативном управлении часто используют средние значения технологических параметров, определяемые на скользящем интервале времени tj-T t tj. В принципе для этого также могут быть использованы рассмотренные ранее алгоритмы дискретного интегрирования, однако для их применения необходимо хранить в оперативной памяти УВМ число п=Т/t0 значений измеряемой величины. Поэтому для скользящего усреднения часто применяют алгоритм экспоненциального сглаживания (3.33), очень экономичный, однако существенно увеличивающий погрешность оценки скользящего среднего.
Методическая
погрешность оценки скользящего среднего
![]() равна разности между значениями,
вычисленными по формулам (3.33) и (4.2).
Первую из них можно преобразовать к
виду
равна разности между значениями,
вычисленными по формулам (3.33) и (4.2).
Первую из них можно преобразовать к
виду
![]() .
(4.20)
.
(4.20)
Тогда искомая погрешность
 .
(4.21)
.
(4.21)
Средний
квадрат методической погрешности
![]() оценки скользящего среднего по формуле
(4.20) получают возведением в квадрат
и усреднением правой части (4.21), что дает
[24]:
оценки скользящего среднего по формуле
(4.20) получают возведением в квадрат
и усреднением правой части (4.21), что дает
[24]:
 (4.22)
(4.22)
Оптимальное
значение параметра алгоритма *
определяют из необходимого условия
минимума методической погрешности
![]() .
.
Практически это уравнение можно решить только численно, с помощью ЭВМ.
Расчеты
по формуле (4.22), выполненные для
автокорреляционной функции простейшего
вида (3.20) при разных значениях
коэффициента ,
а также разных t0
и
Т,
показали [24], что метод экспоненциального
сглаживания увеличивает среднюю
квадратичную методическую погрешность
определения текущего среднего в 1,5—3
раза по сравнению с полученной методом
прямоугольников. Например, если =1
ч, t0
=2 мин и T=1
ч, то *=0,14
и
![]() =0,04.
=0,04.