

Часть 2
МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ ■
ГЛАВА 3
АЛГОРИТМЫ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ В АСУТП
3.1. ЗАДАЧИ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ
Основным видом информации о состоянии объекта управления в АСУТП являются текущие значения технологических параметров, которые преобразуются автоматическими измерительными устройствами в сигналы измерительной информации. После приведения к стандартной форме эти сигналы вводятся в УВМ и представляют в ней значения соответствующих параметров в определенный момент времени.
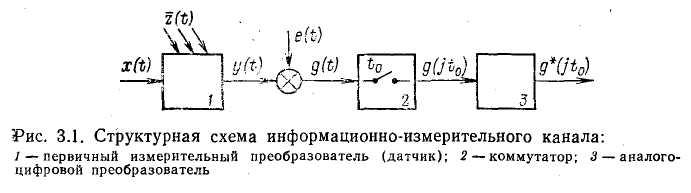
Однако формируемый таким образом массив исходной информации' не пригоден для непосредственного использования при решении задач управления, так как требуется его предварительная обработка, которую принято называть первичной*. Для того чтобы сформулировать задачи первичной обработки информации (ПОИ) в АСУТП, необходимо рассмотреть последовательность преобразований, которым подвергается измеряемая величина в типовом информационно-измерительном канале (ИИК), схема которого представлена на рис. 3.1**.
Измеряемая величина x(t), которую обычно считают стационарной случайной функцией времени, воздействует на вход измерительного преобразователя (ИП), на выходе которого формируется сигнал измерительной информации у(t). Принцип действия большинства ИП таков, что их выходной сигнал зависит не только от значения измеряемой величины, но и от ряда других величин Zj, которые называют влияющими.
Например, термоэлектрический преобразователь температуры (ТПТ) преобразует измеряемую величину — температуру — в сигнал измерительной информации — э.д.с. Однако этот сигнал зависит не только от измеряемой температуры, которая воспри-
* В отличие от вторичной переработки, которой исходная информация подвергается в алгоритмах контроля и управления.
** В состав ИИК входит также модуль нормализации, который на рис. 3.1 не показан, так как не требует решения дополнительных задач ПОИ.
•нимается рабочим спаем, но и от температуры свободных спаев, которая в данном случае является влияющей величиной.
В общем случае без учета динамической характеристики ИП связь между сигналами на его входе и выходе описывается статической характеристикой вида:

Например, статическая характеристика ТПТ в первом приближении может быть описана линейной функцией
![]()
где у — э. д. с. ТПТ, мВ; х — температура рабочего спая, °С; z — температура свободных спаев, °С; k — коэффициент, численное значение которого зависит от материала электродов ТПТ (например, для хромель-копелевого ТПТ £=0,0695 мВ/°С).
Однозначное соответствие между сигналом измерительной информации и измеряемой величиной соблюдается только при постоянных значениях влияющих величин. Для каждого ИП эти номинальные значения z°/ указывают в его паспорте. Подставив их в уравнение (3.1), получим номинальную (паспортную) статическую характеристику ИП:
![]()
В большинстве случаев для ТПТ номинальное значение температуры свободных спаев принято равным 0°С, поэтому паспортная статическая характеристика, полученная из (3.1а) при z = 0, имеет вид: y = kx.
Будем считать, что в процессе работы ИП значения влияющих величин соответствуют номинальным; следовательно, преобразование значений измеряемой величины в сигнал измерительной информации выполняется в соответствии с паспортной статической характеристикой (3.2). Казалось бы, это должно гарантировать точное преобразование х в у, однако и при выполнении этого условия всякий реальный ИП вносит в результаты некоторую погрешность. На структурной схеме (см. рис. 3.1) она представлена в виде случайной функции времени e(t), которая накладывается на полезный сигнал y(t) измерительной информации. Помеха e(t) моделирует не только случайную погрешность Ни, но и электрические наводки в соединительных проводах, вызванные магнитными полями электросилового оборудования; влияние пульсаций давления и расхода в технологических трубопроводах вследствие работы насосов и компрессоров и другие факторы. На вход УВМ поступает сум-мяпньтй сигнал:
![]()
Поскольку АСУТП имеет много ИИК, их обслуживание разделено во времени, каждый канал периодически с периодом to подключается на короткое время ко входу УВМ. В результате непрерывная функция g(t) преобразуется в последовательность импульсов, модулированных по амплитуде функцией g(t). На структурной схеме ИИК (см. рис. 3.1) функцию квантования сигнала g(t) по времени выполняет коммутатор, условно изображенный в виде ключа, замыкаемого с периодом t0. На выходе коммутатора образуется решетчатая функция:
![]()
Следующим видом преобразования, которому подвергается сигнал измерительной информации в ИИК, является квантование по уровню, выполняемое аналого-цифровым преобразователем (АЦП). При этом амплитуды импульсов g{jt0) преобразуются в числа g*(jt0), выраженные в коде, с которыми в дальнейшем оперирует ЦВМ. Современные управляющие вычислительные машины, как правило, используют двоичный код и оперируют с числами, имеющими 8 или 16 разрядов. Операция квантования дискретной величины g(jt0) по уровню описывается следующим выражением:


Величина Ag определяется
из условия:
Из изложенного вытекают следующие основные задачи первичной обработки информации в АСУТП:
1) фильтрация сигнала измерительной информации от случайной помехи (погрешности) e(t);
-
восстановление значения измеряемой величины x(t) по сигналу измерительной информации y(t);
-
коррекция восстановленных значений измеряемой величины с учетом отклонения условий измерения от номинальных;
-
восстановление значений измеряемой величины x(t) приjto<t<. (/+l)^o, т. е. интерполяция и экстраполяция.
Кроме того, необходимо оценить влияние квантования сигнала измерительной информации по времени и по уровню на точность его представления, а также рассмотреть методы контроля и повышения достоверности исходной информации в АСУТП.
3.2. ВЫБОР РАЗРЯДНОСТИ ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ
В УВМ И ЧАСТОТЫ ОПРОСА ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ.
ИНТЕРПОЛЯЦИЯ И ЭКСТРАПОЛЯЦИЯ СИГНАЛА
В современных УВМ наибольшее распространение получил режим обработки данных с фиксированной запятой [48]. При этом погрешность представления исходной информации, вызванная квантованием по уровню, не превышает по абсолютной величине единицы младшего разряда, определяемой соотношением (3.5). Если задана допустимая относительная погрешность квантования по уровню бк, то необходимое число разрядов определяется из условия
![]()
Обычно я>8, так что относительная погрешность квантования по уровню не превышает 0,4%, т. е. является пренебрежимо малой по сравнению с погрешностью измерительного преобразователя.
При разработке АСУТП важен выбор периода ^о квантования по времени сигналов измерительной информации. Эта задача решается с учетом двух противоречивых соображений. С одной стороны, увеличение периода t0 снижает загрузку УВМ операциями сбора и первичной обработки исходной информации. В результате большая доля вычислительных ресурсов системы может быть использована на решение задач контроля и управления более высокого уровня. Это соображение особенно важно для микропроцессорных АСУТП. С другой стороны, при увеличении периода to возрастает погрешность определения действительного значения измеряемой величины y(t) по решетчатой функции g*(jto). Эта погрешность проявляется при восстановле-

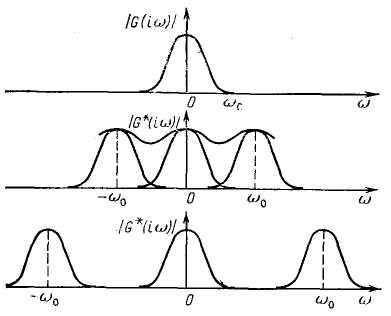
Рис. 3.3. Спектры функций:
а — непрерывной; б, в — решетчатой при Шо<2о)с и при (йо>2юс
нии значений функции у (t) в моменты времени, не совпадающие с моментами отсчета tj = jt0.
Задачи восстановления непрерывной функции по ее дискретным значениям делятся на задачи экстраполяции и интерполяции. Экстраполяцией называют определение будущих
значений функции с момента очередного отсчета до момента поступления следующего отсчета. Интерполяцией называют определение промежуточных значений функции между двумя полученными отсчетами.
В общем случае восстановление непрерывного сигнала по решетчатой функции производится формирующим фильтром, представляющим собой линейное динамическое звено с амплитудно-фазовой характеристикой (АФХ) №ф(ко) (рис. 3.2). Следовательно, для восстановленного сигнала справедливо следующее соотношение:
![]()
где G*(ico)—преобразование Фурье функции g*(/'o).
Из теории импульсных систем известно [55], что спектр решетчатой функции является периодической функцией с периодом, равным частоте квантования (uo = 2njt0.
Смещенные компоненты спектра могут частично перекрывать друг друга, причем степень перекрытия увеличивается по мере уменьшения частоты ©0, т. е. при увеличении периода квантования t0 (рис. 3.3). В результате наложения спектр решетчатой функции" искажается, и из него невозможно выделить спектр исходной непрерывной функции. Исключение составляет физически нереализуемый случай, когда спектр непрерывной функции ограничен, т. е.
![]()
а частота квантования удовлетворяет условию
![]()
При этом смещенные компоненты в спектре решетчатой функции g(jto) не перекрываются, и из него можно выделить главную несмещенную составляющую, совпадающую со спектром непрерывной функции g(t) (см. рис. 3.3). Для точного восстановления исходной непрерывной функции по решетчатой функции необхо-
![]()
димо использовать идеальный нереализуемый фильтр с АФХ
![]()
Действительно, погрешность восстановления, очевидно, равна
или в преобразованном по Фурье виде1—
![]()
Для идеального фильтра (3.7) при выполнении условия (3.6) справедливо равенство
![]()
![]()
и, следовательно
Если для восстановления используют фильтр с АФХ W$(iai), отличающейся от (3.7), то даже при выполнении условия (3.6) точное восстановление исходной непрерывной функции невозможно. Погрешность восстановления получим, применив обратное преобразование Фурье к выражению (3.8) с учетом (3.9):

Таким образом, погрешность восстановления зависит от свойств исходной функции g(t), периода квантования t0 [эти два фактора определяют G*(tco)] и АФХ формирующего фильтра
Рассмотрим наиболее распространенные методы экстраполяции и интерполяции.
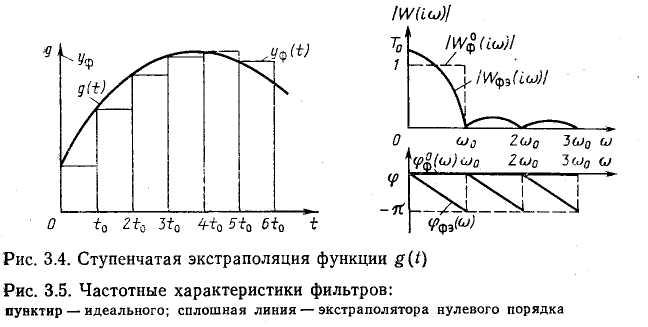
Метод ступенчатой экстраполяции (экстраполятор нулевого порядка) состоит в том, что значение восстанавливаемой функции г/ф(/) для любого момента времени jto<t<i (j-\-l)tQ принимают равным g*(jt0) рис. 3.4):
![]()
Сигнал, восстановленный по алгоритму (3.11), можно, очевидно рассматривать как сумму двух направленных в разные стороны скачков с амплитудой g*(jt0), один из которых сдвинут по времени на to:
![]()
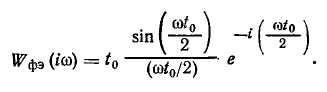
Следовательно, А.ФХ экстраполятора нулевого порядка равна:
![]()
Это выражение можно преобразовать, используя тригонометрическую форму комплексного числа
![]()
а тригонометрические функции кратных углов:
![]()
Подставляя полученное выражение в (3.12) и учитывая, что
![]()
получим
Погрешность экстраполяции обусловлена различием амплитудно-фазовых характеристик идеального фильтра (3.7) и экстраполятора нулевого порядка (рис. 3.5). Для расчета погрешности ступенчатой экстраполяции из частотной области удобно перейти к рассмотрению сигналов y$(t) и g(t) (см. рис. 3.4). Погрешность экстраполяции, очевидно, равна
![]()
Перейдем в этом выражении к новой переменной x=t—jt0, которая может изменяться в пределах от 0 до t0; тогда (3.13) можно записать в виде: e3(t) =g"(0)—g(x).
Если g(t) является стационарной случайной функцией, то математическое ожидание погрешности e3(t) при усреднении по множеству интервалов x,- = t—jt0, / = 0,1,2... равно нулю, так как
![]()
в силу линейности операции определения математического ожидания
Дисперсия погрешности экстраполяции равна: наибольшего значения при т—yt0. Усредняя De{%) по т. в пределах от 0 до t0, окончательно получим:
формулы (3.14) следует, что' дисперсия погрешности экстраполяции зависит от т и

Из достигает где М — знак математического ожидания.
![]()
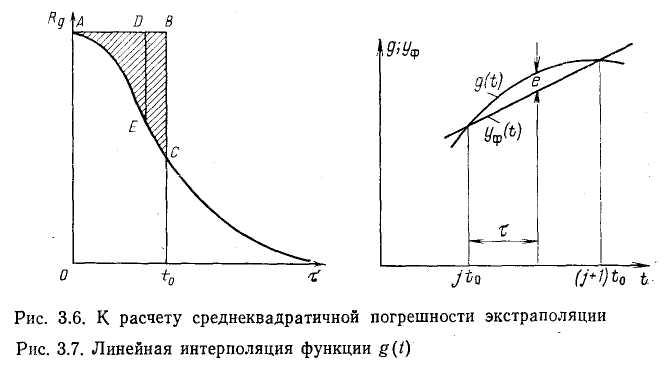
Это выражение позволяет рассчитать дисперсию погрешности экстраполяции по заданному периоду квантования t0 и автокорреляционной функции Rg. Его же можно использовать для определения периода квантования t0, если задано наибольшее допустимое значение среднеквадратичной погрешности экстраполяции ое* и известна автокорреляционная функция Rg(x). Для этого удобно использовать графо-аналитический метод (рис. 3.6).
По графику функции Re(t) определяют такое значение i = t0, при котором удвоенная средняя высота заштрихованной фигуры ABC (т. е. удвоенный отрезок ДЕ) будет равна заданному значению (ae*)2=De. Если ИИК содержит звено чистого запаздывания т0 (например, ввиду необходимости транспортиро-
вания пробы от технологического потока до чувствительного элемента ИП),,то для расчета среднеквадратичной погрешности экстраполяции можно использовать формулу (3.15) с заменой в ней пределов интегрирования: нижнего на то, а верхнего — на
('о+то). Наряду с ИП непрерывного действия в АСУТП применяют и датчики дискретного действия, например хроматографы. Они осуществляют квантование по времени измеряемой величины с собственным периодом tg, который обычно значительно выше •периода опроса t0. В этом случае результирующий период квантования по времени в данном ИИК определяется из условия'
![]()
Для оценки погрешности экстраполяции можно использовать выражение (3.15) с заменой в нем ^о на ig.
Линейная интерполяция (рис. 3.7) является простейшим методом интерполяции, в основе которого лежит кусочно-линейная аппроксимация функции g(t) на интервале значений jto<-t<£
<(/+1)*о.
Уравнение прямой, проходящей через точки g(jto) и ё{(/+1)^о]. можно записать в виде:
![]()
![]()
Погрешность линейной интерполяции
Подставляя в это выражение значение г/ф(О из формулы (3.16), возводя его в квадрат и усредняя по множеству интервалов, а затем по т в пределах от 0 до to, получаем выражение для дисперсии погрешности линейной интерполяции:
![]()
В литературе описаны и другие, более сложные методы интерполяции и экстраполяции [24], однако на практике их применяют редко. Современные УВМ обеспечивают достаточно высокую частоту опроса ИИК, поэтому обычно удается обеспечить требуемую точность восстановления измеряемых величин, используя простейший метод ступенчатой экстраполяции. Обычно среди десятков и даже сотен ИИК можно выделить несколько групп параметров, близких по частотным спектрам. Тогда можно выбрать общий период опроса для каждой группы датчиков. Например, в производстве разбавленной азотной кислоты опрос группы датчиков, контролирующих малоинерционный процесс контактного окисления аммиака, проводится с периодом 15 с, а опрос датчиков на инерционном процессе абсорбции — с периодом 2 мин.
Выбор частоты опроса измерительных преобразователей через число нулей случайного процесса. Выбор частоты опроса t0 по формуле (3.15) требует знания корреляционной функции Rs(r) случайного процесса g(t). Для получения оценки корреляционной функции необходим значительный объем вычислений. Кроме того, часто проще и естественнее задать не дисперсию ошибки Д» от замены непрерывного случайного процесса ступенчатым, а отношение этой величины к дисперсии случайного процесса D. Учтем также важность гарантии того, что выбранная частота опроса не приведет к появлению большей относительной погрешности, чем заданное значение, т. е. важно получить оценку сверху для периода опроса t0.
Для решения поставленной задачи воспользуемся неравенством [22]:

Если бы продолжительность корреляционной функции можно было оценить без построения этой функции, то неравенство (3.17) позволило бы оценить интервал опроса /0- Ниже получим оценку величины А через среднее число нулей случайного процесса No, т. е. через среднее число пересечений им линии своего математического ожидания в единицу времени. Предварительно отметим, что рассмотрение процессов с корреляционной функцией конечной продолжительности более естественны, чем процессов со спектральной плотностью, ограниченной частотой среза, так как первые, в отличие от вторых, физически реализуемы.
Известна связь среднего числа нулей No со спектральной плотностью случайного процесса 5(ш):
![]()
Пользуясь этой формулой, попытаемся найти минимальную продолжительность корреляционной функции Rg, имеющей заданное число нулей No. В силу свойств преобразования Фурье, произведение любых двух функционалов, однозначнскопределяе-мых корреляционной функцией Rg, один из которых имеет размерность времени, а другой — частоты [последний выражается через преобразование Фурье от Rg(r)], не изменяется при сжатии или растяжении корреляционной функции, т. е. при изменении масштаба времени.
Анализ размерности правой части формулы для iV02 показывает, что среднее число нулей имеет размерность частоты. В качестве функционала, имеющего размерность времени, примем
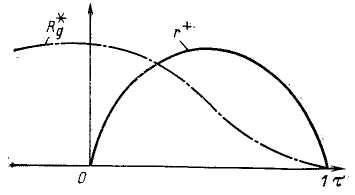
Рис. 3.8. Определение корреляционной функции минимальной продолжительности
продолжительность А корреляционной функции Rg (t). Таким образом, произведение C=NqA зависит от фор-
мы Rg(x) и не зависит от выбора масштаба времени. Поэтому первоначально зафиксируем /А=1 и при этом условии будем-искать минимум No, а точнее JV02. Чтобы учесть требование конечной продолжительности корреляционной функции, перейдем во временную область. Представим 5(ю) в виде |s(«o) |2, что соответствует представлению Rg(x) как свертки двух функций — г+(х) и /"(т), первая из которых определена на интервале (О, 1), а вторая — на интервале (0, —1). Формула для среднега числа нулей может быть теперь переписана в виде
Чтобы найти минимум N\ потребуем, как обычно, минимума числителя при фиксированном значении знаменателя. Задача

(индекс «+» для краткости записи опущен) решается с испольг-зованием уравнения Эйлера. Составим функционал Лагранжа

и запишем для него уравнение Эйлера
![]()
Его решение (а точнее — множество решений):
![]()
Подставив решение в условие для заданной дисперсии, получим-A2Q=D0/n.
Величина / на найденных решениях /=£>0&2я2; тогда I/D0=kn2. Это отношение минимально для k = l. Соответствующее решение
т+(т) показано на рис. 3.8. Там же нанесена корреляционная функция Rg*(x), имеющая при заданном среднем числе нулей минимальную продолжительность.
При Д=1 величина Стщ оказывается равной единице. Следовательно, если фиксировано среднее число нулей No, то минимальная продолжительность корреляционной функции Amm=l/Af0.
Пример. Пусть относительная дисперсия,
связанная с дискретностью опроса
датчиков, не должна превышать пяти
процентов. По формуле (3.19) имеем для t0
оценку
![]()
![]()
Для получения No определяют среднее значение случайного процесса, выбирают реализацию такой длины, чтобы случайный процесс пересекал линию среднего значения приблизительно 100 раз, и подсчитывают отношение числа пересечений к длине реализации: No=N(T)/T.
Если число пересечений в точности равно 100, то, обозначив соответствующую продолжительность реализации через Г1Оо, получим:
![]()
Таким образом, на реализации длиной Тюо нужно 500 раз отобрать показания измерительного преобразователя.
3.3. ФИЛЬТРАЦИЯ ИЗМЕРЯЕМЫХ ВЕЛИЧИН ОТ ПОМЕХ
Фильтрацией называют операцию выделения полезного сигнала измерительной информации y(t) из его суммы с помехой e(t) (см. рис. 3.1). Обычно методы фильтрации основаны на различии частотных спектров функций y(t) и e(t): как правило, помеха бывает более высокочастотной. Для выполнения дальнейших выкладок примем следующие допущения:
1) функция y(t) является стационарным случайным процессом с известными статистическими характеристиками — математическим ожиданием Му, дисперсией Dy и автокорреляционной функцией, описываемой следующим выражением:
![]()
2) помеха e(t) также является стационарным случайным процессом, некоррелированным с полезным сигналом y(t); для нее известны статистические характеристики Ме = 0, De = kDy:
![]()
В результате фильтрации получают оценку г/ф (г) сигнала измерительной информации, к которой предъявляют следующие требования:
она должна быть несмещенной, т. е. должна удовлетворять условию
![]()
среднеквадратичная погрешность оценки должна быть минимальна, т. е.
Оценку уф(t) будем рассматривать как выходной сигнал линейного динамического звена — фильтра с АФХ №ф(т), на вход которого поступает выходной сигнал ИИК g(t) =y(t)-{-e(t).
В разд. 1.5 сформулирована общая задача синтеза линейного оптимального фильтра и получены выражения для АФХ идеального (нереализуемого) и физически реализуемого фильтров. Однако синтез оптимального реализуемого фильтра является сложной задачей и, кроме того, требует достаточно точного задания характеристик полезного сигнала и помехи. Поэтому на практике обычно ограничиваются так называемым параметрическим синтезом фильтров, т. е. задают структуру функции Т^Ф^'со), а ее параметры определяют из условий (3.22) и (3.23).

Спектральную плотность функции
e$(t)
рассчитывают по формуле
![]()
Расчет дисперсии погрешности фильтрации обычно выполняют в частотной области, используя выражение
Функции Se(co) и Sy (ю) являются спектральными плотностями сигналов e(t) и у (t), которые получают в результате преобразования по Фурье автокорреляционных функций (3.20) и (3.21):
![]()
На практике применяют несколько простых алгоритмов фильтрации, рассмотренных ниже. Следует отметить, что в АСУТП некоторые методы фильтрации могут осуществляться как аппа-ратурно (с использованием специальных аналоговых устройств), так и программно. Поэтому для каждого такого метода фильтрации изложен аналоговый и дискретный варианты реализации. Экспоненциальный фильтр*. В аналоговом варианте экспонен-