

3.2. Расчет конструктивных элементов ракет
3.2.1. Примеры решения вопросов по компоновке оборудования
Следующие примеры показывают возможность применения даже простых методов оптимизации для решения задач компоновки оборудования на ракете. В случае многофакторной оптимизации необходимо использовать метод целочисленного линейного программирования.
Пример 1.В шар радиусом R вписать прямой круговой конус максимального объема.
Решение
Обозначим:
R-радиус
шара; r
- радиус основания конуса;
![]() - высота конуса, гдеx
- расстояние от центра шара до основания
конуса.
- высота конуса, гдеx
- расстояние от центра шара до основания
конуса.
Используя очевидные соотношения, получим
![]() ;
;
![]() ;
;![]() ,
,
где V- объем конуса.
Следовательно,
![]() .
.
Экстремальные значения определяются из следующего выражения:
![]() .
.
Решая квадратное уравнение, получим
![]() ,
,
т.е.
![]() ;
;![]() .
.
![]() .
.
Пример 2. Среди всех круговых конусов с данной образующей l найти корпус с наибольшим объемом.
Решение
Целевая
функция имеет вид
![]() ,
гдеR –
радиус основания конуса; h
– высота конуса.
,
гдеR –
радиус основания конуса; h
– высота конуса.
Учитывая
соотношение:
![]() ,
можно записать
,
можно записать
![]() .
.
На
основании
![]() :
:![]()
![]()
![]() .
.
Следовательно,
конус с
![]() и
и![]() будет иметь наибольший объем.
будет иметь наибольший объем.
Пример 3. Определить размеры а, в и с параллелепипеда заданного объема V, который имел бы минимальную поверхность S.
Решение
Критерий оптимальности этой задачи (ЦФ) имеет вид
![]()
Ограничение на параметры a, b и c согласно условию задачи описывается выражением
![]()
Функция Лагранжа имеет вид
![]()
Следовательно:
Для получения расчетных формул выполним следующие действия: разделим первое уравнение системы на второе и первое – на третье.
![]() ;
;![]() ,a=b;
,a=b;
![]() ;
;![]() ,a=c.
,a=c.
Следовательно: a3=V; a=b=c=![]() ,
поэтому
,
поэтому![]() .
.
Пример 4. Разместить в приборном отсеке ракеты приборы двух типов, масса каждого 2 кг, но один из них трехфункциональный, а другой – двухфункциональный; при этом, учитывая ограничение по общей массе в 7 кг, добиться максимальной эффективности приборов.
Решение
Математическая формулировка задачи выглядит следующим образом.
Максимизировать
ЦФ
![]()
при
ограничениях
![]() ;
;![]() ;
;![]() ,
,
где
![]() - целочисленные.
- целочисленные.
Начальный
шаг решения этой задачи состоит в
нахождении решения задачи линейного
программирования (ЛП), получаемой при
отбрасывании условий целочисленности
![]() и
и![]() .
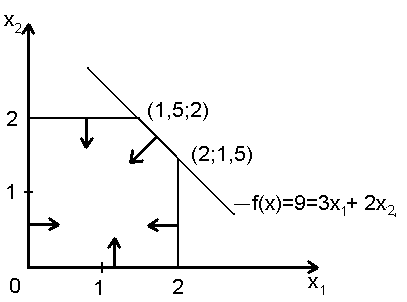
Обозначим эту задачу через ЛП-1, решение
которой представлено на рис. 3.10.
.
Обозначим эту задачу через ЛП-1, решение
которой представлено на рис. 3.10.
|
Рис. 3.10. Решение ЛП – 1 |
Из полученного графика видно, что найденное решение (x1 = 2; x2 = 1,5; f(x) = 9) не может быть оптимальным, целочисленным .
Данное
значение
|
Следующий
шаг метода заключается в просмотре
целочисленных значений
![]() ,
больших или меньших 1,5. Это делается
путём добавления к задаче ЛП-1 ограничения
либо
,
больших или меньших 1,5. Это делается
путём добавления к задаче ЛП-1 ограничения
либо![]() ,
либо
,
либо![]() .
Таким образом, из задачи ЛП-1 получаются
две задачи следующего вида: ЛП-2 и ЛП-3,
представленные соответственно на рис.
3.11 и 3.12.
.
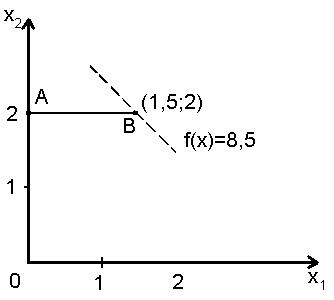
Таким образом, из задачи ЛП-1 получаются
две задачи следующего вида: ЛП-2 и ЛП-3,
представленные соответственно на рис.
3.11 и 3.12.
|
Рис. 3.11. Решение ЛП – 2 |
Рис. 3.12. Решение ЛП – 3 |
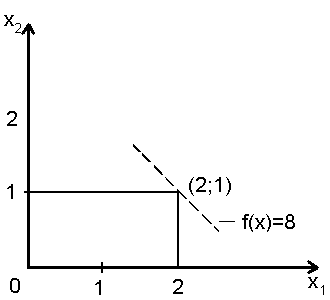
В этих задачах наряду с первоначальным условием соответственно добавлены:
-
для ЛП – 2 новое ограничение
![]() ,
,
-
для ЛП – 3 новое ограничение ![]() ,
поэтому допустимая область в этом случае
представляет собой просто отрезок АВ.
,
поэтому допустимая область в этом случае
представляет собой просто отрезок АВ.
Изображённые допустимые области задач ЛП-2 и ЛП-3 обладают следующими свойствами.
1.
Оптимальное решение задачи ЛП-1![]() недопустимо
для обеих задач ЛП-2 и ЛП-3. Таким образом,
это решение не повторится.
недопустимо
для обеих задач ЛП-2 и ЛП-3. Таким образом,
это решение не повторится.
2. Любое целочисленное (допустимое) решение исходной задачи допустимо для задачи ЛП-2 или ЛП-3. Таким образом, при введении этих задач не происходит потери допустимых (целочисленных) решений исходной задачи.
Оптимальное
решение задачи ЛП-2 – точка (![]() ,
,![]() ),
где
),
где![]() .
Следовательно, значение
.
Следовательно, значение![]() представляет собой нижнюю границу
максимального значения
представляет собой нижнюю границу
максимального значения![]() для смешанной задачи ЦЛП. Поскольку
ранее была получена лишь верхняя граница,
равная 9, нельзя утверждать, что решение
ЛП-2 оптимально для исходной задачи.
Следовательно, необходимо рассмотреть
задачу ЛП-3. Однако её решение недопустимо
для исходной задачи ЦЛП, поскольку
для смешанной задачи ЦЛП. Поскольку
ранее была получена лишь верхняя граница,
равная 9, нельзя утверждать, что решение
ЛП-2 оптимально для исходной задачи.
Следовательно, необходимо рассмотреть
задачу ЛП-3. Однако её решение недопустимо
для исходной задачи ЦЛП, поскольку![]() ,
но при этом
,
но при этом![]() .
Поэтому необходимо проверить существование
в допустимой области ЛП-3 целочисленного
решения, дающего значение
.
Поэтому необходимо проверить существование
в допустимой области ЛП-3 целочисленного
решения, дающего значение![]() .
Для этого рассматриваются задачи ЛП-4
и ЛП-5, получающиеся при добавлении к
ЛП-3 ограничений
.
Для этого рассматриваются задачи ЛП-4
и ЛП-5, получающиеся при добавлении к
ЛП-3 ограничений![]() и
и![]() соответственно.
соответственно.
|
Рис. 3.13. Решение ЛП – 4 |
Допустимая область задачи ЛП-4 состоит из отрезка ДС, показанного на рис. 3.13, задача ЛП-5 не имеет допустимых решений.
Итак,
точка (
|

Удобно представить последовательность задач ЛП, возникающих при использовании процедуры метода ветвей и границ, в виде сети или дерева (рис. 3.14). Они состоят из множества вершин и соединяющих их дуг или ветвей. Каждая вершина представляет собой либо начальную, либо конечную точку некоторой ветви.
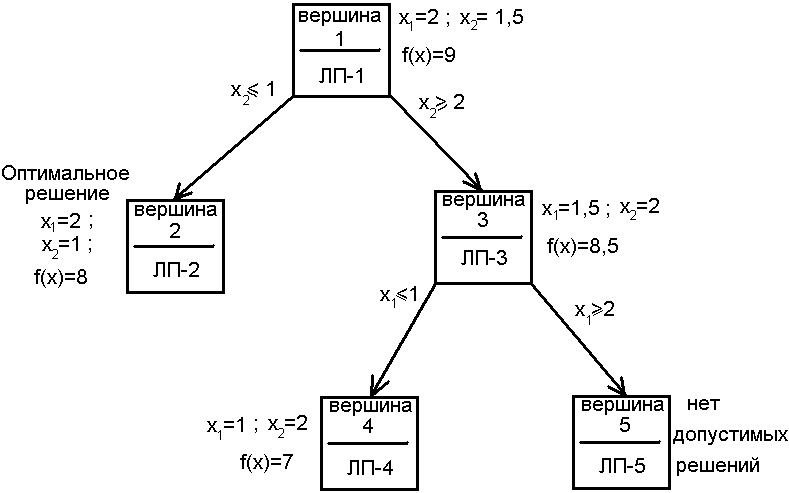
Рис. 3.14. Схема решения
Вершина
1 соответствует задаче ЛП-1, получаемой
из исходной задачи при отбрасывании
требования целочисленности переменных.
Ветвление в вершине 1, определённое
целочисленной переменной
![]() с помощью ограничения
с помощью ограничения![]() ,
приводит к вершине 2 (ЛП-2). Поскольку
задача ЛП-2 имеет оптимальное целочисленное
решение, нет необходимости производить
ветвление в вершине 2. В этом случае,
когда в некоторой вершине возникает
подобная ситуация, говорят, что
рассматриваемая вершина прозондирована.
Ветвление в вершине 1 по ограничению
,
приводит к вершине 2 (ЛП-2). Поскольку
задача ЛП-2 имеет оптимальное целочисленное
решение, нет необходимости производить
ветвление в вершине 2. В этом случае,
когда в некоторой вершине возникает
подобная ситуация, говорят, что
рассматриваемая вершина прозондирована.
Ветвление в вершине 1 по ограничению![]() даёт ЛП-3 (вершина 3). Поскольку оптимальное
решение ЛП-3 является дробным, происходит
дальнейшее ветвление в вершине 3 по
целочисленной переменной
даёт ЛП-3 (вершина 3). Поскольку оптимальное
решение ЛП-3 является дробным, происходит
дальнейшее ветвление в вершине 3 по
целочисленной переменной![]() .
Таким образом, появляются вершины 4 и
5. Эти вершины являются прозондированными,
поскольку ЛП-4 обладает целочисленным
решением, а ЛП-5 не имеет допустимых
решений. Наилучшее решение из
прозондированных в вершинах является
оптимальным.
.
Таким образом, появляются вершины 4 и
5. Эти вершины являются прозондированными,
поскольку ЛП-4 обладает целочисленным
решением, а ЛП-5 не имеет допустимых
решений. Наилучшее решение из
прозондированных в вершинах является
оптимальным.