

2.8. Геометрическое программирование
2.8.1. Основные понятия и расчетные формулы
Отсутствие универсального метода решения общей задачи нелинейного программирования послужило причиной появления множества узкоспециализированных методов, приспособленных к решению отдельных задач. К таким методам относится и метод геометрического программирования, возникший и получивший развитие в связи с задачами инженерного проектирования.
Основное требование метода геометрического программирования состоит в том, чтобы и целевая функция, и ограничения были выражены в виде так называемых позиномов, имеющих вид:
![]()
![]() (2.22)
(2.22)
где
![]() - произвольные вещественные числа.
- произвольные вещественные числа.
Анализ известных формул расчета деталей машин, а также всевозможных условий прочности, жесткости, устойчивости и др., показывает, что большая часть из них выражается зависимостями вида (2.22). Именно это обстоятельство позволяет считать метод геометрического программирования удачным для решения задач оптимального проектирования объектов машиностроения.
По сравнению с другими методами оптимизации геометрическое программирование имеет следующие преимущества:
позволяет выявить достаточно полную картину сравнительной значимости проекта и отдельных слагаемых частей целевой функции;
минимальное значение целевой функции находится до определения оптимальных значений параметров;
исходная задача с нелинейными целевой функцией и ограничениями сводится к двойственной задаче с нелинейной целевой функцией, но линейными ограничениями, решить которую легче, чем исходную задачу;
имеется возможность количественной оценки степени трудности решаемой задачи;
для реализации метода с применением ЭВМ можно разработать универсальный программный комплекс.
В
общем случае исходную задачу геометрического
программирования формулируют следующим
образом: найти минимальное значение
целевой функции f(x) при ограничениях
![]()
![]() ,
причем f(x) и левые части ограничений
являются позиномами (2.22).
,
причем f(x) и левые части ограничений
являются позиномами (2.22).
Одна из важнейших характеристик - степень трудности решаемой исходной задачи геометрического программирования – определяется из выражения
d = n-(m+1),
где п - общее число слагаемых членов во всех позиномах (в целевой функции и ограничениях); m - число оптимизируемых параметров.
Степень трудности решаемой задачи характеризуется:
при d = 0 – сложностью решения системы n линейных уравнений;
при d = 1 – сложностью решения одного нелинейного и системы n линейных уравнений;
при d > 0 – сложностью решения системы d нелинейных алгебраических уравнений и n линейных уравнений.
Подход
к оптимизации позиномиальных функций
основан на неравенстве между средним
арифметическим и средним геометрическим,
согласно которому среднее геометрическое
не превосходит среднее арифметическое.
Использование неравенства для средних
привело к появлению термина геометрического
программирования.
![]()
Проиллюстрируем метод геометрического программирования (ГП) в случае линейных ограничений.
Неравенство для
средних позволяет заключить, что для
произвольных положительных чисел
![]() и таких чисел
и таких чисел![]() ,
что
,
что![]() ,
имеет место соотношение
,
имеет место соотношение
![]() ,
(2.23)
,
(2.23)
причем равенство достигается
в случае
![]() .
Полагая
.
Полагая![]() ,
можно переписать выражение (2.23) для
любых величин
,
можно переписать выражение (2.23) для
любых величин![]() и
и![]() ,
,![]() :
:
 .
.
Неравенство
обращается в равенство только тогда,
когда
 .
.
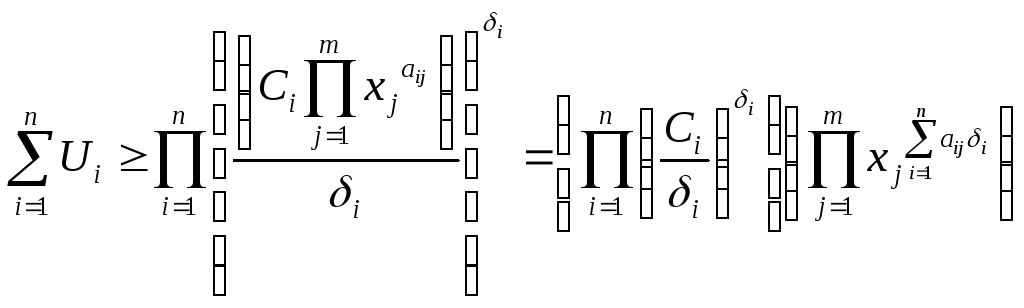
Пусть
![]() .
Тогда ЦФf(x)
=
.
Тогда ЦФf(x)
=
![]() .
.
Следовательно,
 .
.
Неравенство имеет
место при любых
![]() ,
таких, что
,
таких, что![]() .
Предположим, что имеет место соотношение:
.
Предположим, что имеет место соотношение:![]() .
Тогда неравенство сводится к системе
соотношений:
.
Тогда неравенство сводится к системе
соотношений: для всех
для всех![]() при
при![]() и
и![]() .
.![]() Поскольку
неравенство может обращаться в равенство,
можно получить
Поскольку
неравенство может обращаться в равенство,
можно получить
 ,
,