

3.1.6. Подшипник скольжения
|
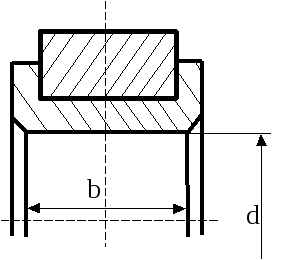
Рис. 3.6. Подшипник скольжения |
При проектировании высоконагру-женных подшипников скольжения (рис. 3.6) в качестве ЦФ принимается взвешенная сумма интенсивности изнашивания цапфы и прогиба вала:
где а1, и а2 - весовые коэффициенты; Δ -интенсивность изнашивания цапфы; y0 - прогиб вала в подшипнике. |
Величина Δ находится из выражения
![]()
где
v -
износ цапфы на единицу мощности,
затрачиваемой на трение;
f - коэффициент
трения; F -
радиальная сила, действующая на подшипник;
![]() - радиус подшипника;
ω- угловая
скорость вала.
- радиус подшипника;
ω- угловая
скорость вала.
Коэффициент трения определяется по формуле

где
ψ -
относительный зазор; ε – относительный
эксцентриситет; ![]() .
.
Прогиб вала в подшипнике находится из выражения
![]()
где Е – модуль продольной упругости материала вала.
На оптимизируемые параметры накладывается ограничение
![]()
где
![]() - среднее давление на подшипник;
- среднее давление на подшипник; ![]() - допустимое давление.
- допустимое давление.
Задача состоит в том, чтобы методом геометрического программирования определить параметры оптимального подшипника скольжения, приняв следующую модель оптимизации:
![]()
![]()
Степень трудности этой задачи d = 4-(2+1) = 1.
Двойственная функция V() = (C1/1)1 (C2/2)2 (C3/3)3 C44.
При двойственных ограничениях 0 1, 0 2 0 3 , 0 4 система уравнений, состоящая из условий нормализации и ортогональности, имеет вид
1+2+3 = 1;
1+32-43 - 4 = 0;
-22+33 -4 = 0.
Приняв 3 = r, получим: 1 = 5/4 – r; 2 = -1/4 + 2r; 4 = 0,5 – r.
Уравнение равновесия для данной задачи после подстановки выражений для iимеет вид
4(5-12r)-3 (8r-1)2 r = C22 C3/ (C13 C4),
где
![]() ;
;![]() ;
;
![]() ;
; ![]() .
.
После определения правой части уравнения по заданным исходным данным решается нелинейное уравнение относительно r , а затем вычисляются значения двойственных переменных, что позволяет найти величины оптимизируемых параметров и ЦФ.
3.1.7. Червячно-цилиндрический редуктор
В задаче определения оптимальных значений параметров червячно-цилиндрического редуктора (рис. 3.7) в качестве ЦФ принята суммарная стоимость материалов обеих ступеней:
![]()
где К1´- весовой коэффициент, учитывающий стоимость единицы массы червячного колеса и червяка; К2´- весовой коэффициент, учитывающий стоимость единицы массы колес цилиндрической ступени редуктора; т12 - масса червячного колеса; т21 и т22 – масса соответственно ведущего и ведомого колеса цилиндрической ступени.
В червячной ступени стоимость червяка учитывают при определении весового коэффициента червячного колеса, обод которого в большинстве случаев изготовляют из дефицитных материалов с антифрикционными свойствами.
При введении коэффициента f = К1´/ К2´ параметр К определяется по формуле
![]()
|
b1 b2
d12
Рис. 3.7. Схема червячно-цилиндрического редуктора
|
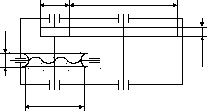 d21d22
d21d22Масса каждого колеса находится из выражения
![]()
где - индекс ступени; - индекс колеса; ρ – плотность материала колеса; В – ширена колеса; d – диаметр делительной окружности колеса.
Конструктивные параметры определяются по формулам
B1=dd11 , d12=z12ms1 , z12=u1z11, d11=qms1 ,
где В1 – ширина червячного колеса; d – коэффициент ширины; d11 – диаметр червяка; d12 – диаметр делительной окружности червячного колеса; u1 – передаточное число червячной ступени; z11 – число заходов червяка; z12 – число зубьев червячного колеса; q – относительная толщина червяка; ms1 – осевой модуль зацепления.
Обозначив:
![]() а также учитывая:
В2 =
aa2
и d22
= u2d21
,
а также учитывая:
В2 =
aa2
и d22
= u2d21
,
первое слагаемое ЦФ имеет вид
![]() ,
,
а сумма второго и третьего слагаемых
![]()
где ρ1 – плотность материала колес цилиндрической ступени; а – коэффициент ширины зуба; d21 и d22 - диаметр делительной окружности соответственно ведущего и ведомого колеса цилиндрической ступени; а2 – межосевое расстояние цилиндрической ступени; и2 – передаточное число цилиндрической ступени.
Из расчёта цилиндрической зубчатой передачи на контактную прочность можно записать
где
е2
= 340·103![]() ;
НР2
– допустимое контактное напряжение
материала зубьев шестерни цилиндрической
ступени; Т21
– крутящий момент на ведущем валу
цилиндрической ступени редуктора; К2
– коэффициент нагрузки.
;
НР2
– допустимое контактное напряжение
материала зубьев шестерни цилиндрической
ступени; Т21
– крутящий момент на ведущем валу
цилиндрической ступени редуктора; К2
– коэффициент нагрузки.
Момент на ведущем валу определяется по формуле
Т21 = и11Т11,
где Т11 – крутящий момент на ведущем валу редуктора; 1 – КПД первой ступени передачи.
Следовательно, сумма масс колеса и шестерни передачи находится из выражения

Итак, ЦФ имеет вид
![]()
где
В качестве ограничений на параметры оптимизации и1, и2, t и а2 примем ограничения на контактные напряжения, возникающие в зацеплениях червячной и цилиндрической передач, и на общее передаточное число и:

Так как d21 = 2а2/(1+ и2), то, обозначив:
![]()
 С7
= и,
С7
= и,
получим следующие нелинейные ограничения в виде неравенств:
![]()
![]()
![]()
Таким образом, задача оптимизации двухступенчатого червячно-цилиндрического редуктора сведена к решению задачи геометрического программирования со степенью трудности задачи:
d = 7 – (4 + 1) = 2.
Соответствующая этой задаче двойственная программа состоит в максимизации двойственной функции:
![]()
где
![]() i = 1,2,
. . . , 7;
i = 1,2,
. . . , 7; ![]()
![]() k
= 1, 2, 3.
k
= 1, 2, 3.
В
этих выражениях ![]() j
= 0, 1, 2.
j
= 0, 1, 2.
Условия неотрицательности на вектор r:
![]() i
= 1,2, . . . , 7.
i
= 1,2, . . . , 7.
Базисные постоянные находятся из выражения
![]() j
= 0, 1, 2,
j
= 0, 1, 2,
где Сi > 0 – коэффициенты, зависящие от исходных данных.
Вектор нормализации b(0) удовлетворяет условию соответственно нормализации и ортогональности:
![]()
![]() j
= 1, 2, 3, 4.
j
= 1, 2, 3, 4.
Векторы невязки b(j) (j = 1, 2) образуют базис пространства решений однородной линейной системы:
![]()
![]() j
= 1, 2, 3, 4.
j
= 1, 2, 3, 4.
где аij – матрица экспонент исходной задачи геометрического программирования.
Векторы b(0), b(1) и b(2), найденные в результате преобразований матрицы экспонент по методу Бранда, имеют вид
Несложно проверить, что полученные векторы нормализации и невязки удовлетворяют необходимым условиям.
Следовательно, двойственные переменные находятся по формулам
1 = 1 – r1 – r2;
2 = -0,5 + r1 + 0,5r2;
3 = 0,5 + 0,5r2;
4 = 2 – 2r1 – 2r2;
5 = r1;
6 = r2; 7 = 1.
Значения r1 и r2, максимизирующие двойственную функцию, определяются из решения системы
![]()
![]()
где базисные постоянные находятся по формулам
![]()
![]()
После определения максимизирующих значений r1 и r2 максимальное значение двойственной функции можно найти из выражения

Это значение определяет одновременно и минимум ЦФ.
Оптимальные значения u1, u2, t и a2 находятся из решения системы уравнений
Решив эту систему, получим формулы для вычисления оптимизируемых параметров
![]()
![]()
![]()
![]()
Следует отметить, что аналогичный подход можно применить для многоступенчатых редукторов и других типов, когда из рекомендуемого диапазона передаточных чисел необходимо выбрать единственное решение, минимизирующее значение ЦФ.