

.............................
set(hl,’XData’,x,’YData’,p);
set(he,’XData’,x,’YData’,E);
............................
Задание 3. Постройте изображение качающегося (в соответствии с расчетом) маятника, а также зависимость x(t). При изображении качающегося маятника обратите внимание на различия в задании свойства ’EraseMode’ - ’xor’, ’background’ или ’none’. Для построения движущегося отрезка, изображающего маятник, рекомендуется присвоить (с помощью оператора set) свойству ’EraseMode’ значение ’background’ для соответствующего объекта.
Изобразите также (в отдельном окне) зависимость x(t), чтобы можно было видеть движение маятника одновременно в трех разных формах.
Задание 4. Получите зависимость частоты колебаний маятника от амплитуды. Для этого удобно начальную точку фазовой траектории (x0, p0) задавать на оси p = 0 и определять полупериод колебаний T/2, подсчитывая число шагов, необходимых для смены знака у импульса p.
Для представления зависимости ω(x0) удобно выделить отдельное графическое окно.
Задание 5. Включите в программу силу трения, пропорциональную скорости. Коэффициент пропорциональности следует включить в число параметров, доступных оперативному изменению (если вы работаете с графическим интерфейсом).
4.2. Вынужденные колебания
Будем рассматривать только колебания маятника под действием гармонической силы (и с учетом силы трения), а также будем иметь в виду ту модель, которая описана в (1). В этом случае безразмерное уравнение движения имеет вид
x¨ = − sin x − 2λ · x˙ + f · cos x · sin Ωt. |
(3) |
4.2.1.Переходные колебания
Если маятник в начальный момент покоился, а в дальнейшем на него действует периодическая сила, то в течение некоторого времени он раскачивается, происходит нерегулярное движение. При этом возможен не только рост амплитуды, но
30
и ее периодическое нарастание и убывание. Спустя же какое-то время движение становится установившимся, периодическим, причем с частотой внешней силы Ω. Приближение к такому режиму асимптотическое, т.е. происходит, строго говоря, бесконечно долго, тем не менее вполне можно указать интервал времени, спустя который нерегулярные процессы оказываются незаметны (с обусловленной точностью). Обычно для этого нужно примерно такое же время, как для затухания свободных колебаний.
Задание 6. Получите различные режимы переходных колебаний – с монотонным ростом амплитуды и с ее осцилляциями. При этом предпочтительно выбрать небольшое значение амплитуды силы f, такое, чтобы даже попав в резонанс, эта сила не приводила маятник во вращение. Коэффициент в силе трения должен быть не слишком велик, чтобы свободные колебания затухали
втечение многих периодов. Одна из возможностей наблюдения эффекта – выводить зависимость x(t) в таком масштабе, чтобы график был сильно сжат
внаправлении оси t13.
4.2.2.Резонанс
Если уравнение (1) для свободных колебаний математического маятника в принципе решается аналитически (решение выражается через специальные функции), то уравнение вынужденных колебаний с трением не решается и его можно исследовать качественно или численно. До начала численного решения полезно рассмотреть качественные особенности предполагаемого решения. Рассмотрим случай малых колебаний и установившийся (стационарный) режим. При малых углах отклонения маятника (x 1) несложно проанализировать зависимость амплитуды установившихся колебаний маятника под действием гармонической силы F (t) = f cos ωt от частоты силы ω14.
Если заменить sin x на x, то получим линейное относительно x уравнение (гармоническое приближение):
x¨ + 2λx˙ + x = f cos ωt.
Его решение удобно искать в виде
x = Aeiωt + A e−iωt, |
(4) |
13 В этом задании предполагается ограничиться исследованием, не затрагивающим всерьез
особенности переходных процессов, связанные с нелинейными эффектами.
14Множитель cos(x) не играет роли в рассматриваемом нами процессе, поэтому мы этой зависимостью пренебрегаем, тем более, что при x 1 cos(x) ≈ 1.
31
представив при этом силу в форме F = (f/2)(eiωt + e−iωt). Приравняв слагаемые |
|||||||||||
с одинаковой зависимостью от времени, получим |
|
|
|
|
|
|
|||||
|
|
f |
|
|
|
|
|
|
|
|
(5) |
откуда |
|
A = 2(1 − ω2 + 2iλω) , |
|
|
|
|
|
||||
|
x = a · cos(ωt + δ), |
|
|
|
|
|
|
||||
где |
|
|
|
|
|
|
|
||||
|
a = 2 · |A| = f/ (1 − ω2) + 4λ2ω2 , |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||
|
|
δ = arcctgω2 − 1. |
|
|
|
|
|
|
|||
|
|
|
2λω |
|
|
|
|
|
|
||
Учтем теперь следующий (ангармонический) член разложения sin x, по-прежнему |
|||||||||||
считая угол x малым: |
|
|
|
|
|
|
|
|
|
|
|
|
|
x¨ − 2λx˙ + x − x3/6 = f cos ωt. |
|
|
|
|
|
||||
Дополнительные слагаемые, получаемые за счет подстановки (4) в член x3/6, бу- |
|||||||||||
дут иметь вид |
|
|
|
|
|
|
|
|
|
|
|
x3/6 = (A3e3iωt + 3A2A eiωt + 3AA 2e−iωt + A 3e−3iωt)/6, |
|
|
|||||||||
Слагаемые, пропорциональные e±3iωt, при- |
2 |
|
|
|
|
|
|
||||
ведут к появлению в (4) малых добавок бо- |
|
|
1.8 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
лее высокого порядка. Это можно предста- |
|
|
1.6 |
|
|
|
|
|
|
||
|
|
1.4 |
|
|
|
|
|
|
|||
вить себе как появление в правой части урав- |
|
|
|
|
|
|
|
|
|||
|
|
1.2 |
|
|
|
|
|
|
|||
нения силы, пропорциональной cos 3ωt, а по- |
a |
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
скольку их частота далека от резонанса, то и |
|
|
0.8 |
|
|
|
|
|
|
||
|
|
0.6 |
|
|
|
|
|
|
|||
вклад их будет мал. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
|
Теперь, как и раньше, собирая и прирав- |
|
|
|
|
|
|
|
|
|||
|
|
0.2 |
|
|
|
|
|
|
|||
нивая члены, имеющие одинаковую зависи- |
|
|
0 |
0.7 |
0.8 |
|
0.9 |
1 |
1.1 |
||
|
|
0.6 |
ω |
||||||||
мость от времени, например при eiωt, вместо |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
(5) получаем (1 −ω |
2 |
2 |
|
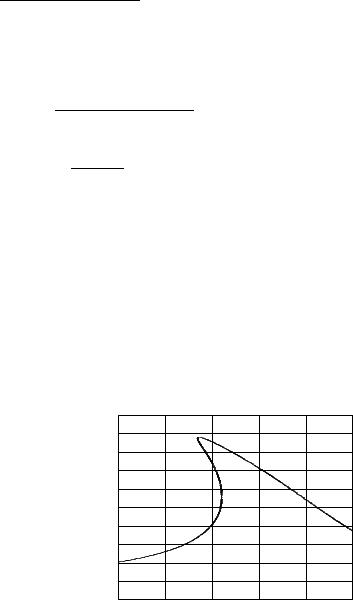
Рис. 6. Резонансная кривая при на- |
|||||||
|
+ 2iλω + |A| /2)A = |
|
личии гистерезиса |
|
|
|
|
||||
f/2, откуда получаем уравнение |
|
|
|
|
|
||||||
[(1 − ω2 + |A|2/2)2 + 4λ2ω2]|A|2 = f2/4. |
|
|
|
(6) |
|||||||
Это уравнение разрешаем относительно ω2, после чего зависимость a(ω) легко |
|||||||||||
представить с помощью MATLAB графически (рис 6). Аналитическое исследо- |
|||||||||||
вание этой зависимости приведено, например, в [7]. |
|
|
|
|
|
|
|||||
32

Зависимость a(ω) представляется существенно разной при различных значениях λ и f. Однако при относительно больших амплитудах сделанное нами при выводе (3) предположение о малости добавок к гармоническому колебанию нарушается, так что следует ожидать отклонения от этих кривых тех значений амплитуд, которые мы можем найти в компьютерном эксперименте (и которые являются, разумеется, истинными).
Появляются такие участки кривой, которые могут быть достигнуты при непрерывном изменении частоты либо только путем ее повышения, либо только путем понижения.
Для наблюдения такого явления нужно обеспечить, чтобы при изменении частоты Ω на малую величину ∆Ω не происходило резких скачков силы f ·cos x·sin Ωt. Тогда переходной процесс будет завершаться быстро и точка x0(ω) будет перемещаться вдоль одной ветви резонансной кривой (разумеется, исключая тот случай, когда скачок на другую ветвь становится неизбежен).
Чтобы задать такое плавное изменение силы, нужно избежать скачка фазы силы Ωt при изменении частоты Ω → Ω + ∆Ω. Для этого в программе достаточно ввести переменную, равную этой фазе, скажем wt, и на каждом шаге по времени наращивать именно эту фазу: wt=wt+dwt, где dwt=w*dt – приращение фазы. При изменении же частоты dw= ∆Ω следует просто изменять приращение фазы: dwt=dwt+dw*dt15.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Программа отрисовки зависимости стационарной амплитуды
%от частоты вынуждающей силы
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Обратите внимание на то, что lam -- это половина коэффициента
%при импульсе в выражении силы трения!
clear; |
|
f=0.26; |
% Амплитуда вынуждающей силы |
lam=0.095; |
% Половина коэффициента при импульсе |
|
% в выражении силы трения! |
a=0.05:0.001:1.0; aa=a.^2; d=4*lam^4-4*lam^2*(1-0.5.*aa)+f^2./(4*aa); k=find(d>=0);
aa=aa(k);
t
15 Тем самым в качестве фазы будет использована величина ω(t)dt.
0
33