

где Gi i =Gi - интенсивности составляющих входного сигнала, Gi j =Gj i - взаимные интенсивности составляющих входного сигнала.
Элементы матрицы (4.13) могут зависеть от времени или быть постоянными для стационарных входных сигналов.
4.2. Спектральный метод расчета установившегося случайного процесса в линейной стационарной системе
Данный аналитический метод, называемый также методом передаточных функций, детально развит в рамках теории автоматического управления [2, 3, 32] и основан на использовании структурно -динамических схем систем и спектральных плотностей случайных процессов. Непосредственное использование спектральных плотностей возможно только для стационарных процессов. Поэтому данный метод позволяет строить модели пр оцессов, соответствующих некоторым установившимся режимам в стационарных системах при стационарных воздействиях.
Применение данного метода основано на использовании двух свойств линейных систем:
1.Реакция линейной системы на совокупность входных воздействий может быть определена как сумма ее реакций на каждое из них в отдельности (принцип суперпозиции).
2.Случайный сигнал на выходе физически реализуемого линейного динамического звена имеет закон распределения, близкий к нормальному (свойство фильтра).
Второе свойство, строго говоря, имеет место при следующем соотно-
шении между порядком знаменателя n и числителя m передаточной функции звена или системы: n – m ≥ 2. Однако его обычно используют во всех случаях, когда выполняется условие физической реализуемости n–m ≥ 1.
Благодаря указанным свойствам оказывается возможным изолированно рассматривать преобразование линейной системой детерминирова нных и центрированных случайных составляющих входных сигналов и ограничиваться для выходного сигнала или ошибки системы нахождением только матем а- тического ожидания и дисперсии, полностью определяющих но рмальный закон распределения. Для оценки корреляционных свойств выходных сигналов используются корреляционные функции и спектральные плотности.
Каждый случайный входной сигнал преобразуется в сумму:
,
G t mg t G t
110
где mg (t) - детерминированная составляющая, или математическое ожидание
входного сигнала; G(t) - центрированная случайная составляющая входного
сигнала (случайный процесс с нулевым математическим ожиданием). Модель преобразования детерминированной составляющей строится на
основе стандартного аппарата передаточных функций:
L[my(t)] = Φ(p)L[mg (t)],
где L[mg (t)], L[my(t)] - изображения по Лапласу детерминированных составляющих соответственно входного и выходного сигналов; - передаточная функция звена или системы.
Выходной сигнал в установившемся процессе может быть определен по теореме о конечном значении:
my |
уст |
limmy (t) lim p p L mg t |
(4.14) |
|
|
t |
p 0 |
|
|
|
|
|
||
Например, при mg(t)=const для асимптотически устойчивой системы
из (4.14) получим: my=Φ(0)mg=const.
Модель преобразования центрированной случайной составляющей
строится для спектральных плотностей |
|
Sy(ω)=|Φ(jω)|2Sg(ω), |
(4.15) |
где спектральная плотность входного сигнала определяется по его корреляционной функции
Sg K g e j d .
По полученной спектральной плотности выходного сигнала находят его дисперсию:
D |
|
1 |
|
S d , |
|
(4.16) |
||||||||||
|
2 |
|
||||||||||||||
|
y |
|
|
|
|
y |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интеграл вида (4.16) обычно удается привести к форме: |
|
|||||||||||||||
In |
|
1 |
|
|
|
|
|
|
h j |
d , |
|
|||||
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|||
|
2 |
g |
n |
j g |
n |
j |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где hn(jω)=b1(jω)2n-2 +b2(jω)2n-4 |
+...+bn, |
|
gn(jω)=a0(jω)n |
+a1(jω)n-1 |
||||||||||||
+...+an.
Тогда:
111

In ( 1) n 1 'n ,
2a0 n
где ∆n - n-й определитель Гурвица для многочлена gn (p) [3], а ∆'n получается из ∆n заменой 1-й строки коэффициентами многочлена hn . Например, при n=4
|
|
a1 |
a3 |
0 |
0 |
|
|
|
b1 |
b2 |
b3 |
b4 |
|
||
4 |
|
a0 |
a2 |
a4 |
0 |
, |
'4 |
|
a0 |
a2 |
a4 |
0 |
. |
||
0 |
a1 |
a3 |
0 |
0 |
a1 |
a3 |
0 |
||||||||
|
|
|
|
|
|
||||||||||
|
|
0 |
a0 |
a2 |
a4 |
|
|
|
0 |
a0 |
a2 |
a4 |
|
||
Для системы с несколькими случайными входными сигналами огр аничимся случаем, когда они не коррелированы между собой.
Тогда математическое ожидание и дисперсия выходного сигнала опр е- деляются на основе принципа суперпозиции:
|
|
|
|
|
|
K |
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( p) L mG |
t , |
|
|||
|
|
|
|
my limp G |
|
||||||||||
|
|
|
|
|
|
k 1p 0 |
k |
|
k |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
1 |
K |
|
|
|
|
|
2 SGk ( )d , |
|
|
|
|
|
|
Dy |
|
|
|
ΦGyk ( j ) |
(4.17) |
||||||
|
|
|
|
|
|||||||||||
где mG t |
|
|
|
|
2 k 1 |
|
|
|
|
|
|
|
|||
|
и SG |
- математическое ожидание и спектральная плотность |
|||||||||||||
|
k |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
k -го |
входного |
сигнала |
(задающего |
|
или |
|
возмущающего |
воздействия); |
|||||||
G t m |
|
|
|
y p |
|
|
|
|
|
|
|
|
|||
|
t Gk t ; |
- передаточная функция системы от k-го |
|||||||||||||
k |
G |
|
|
|
G |
|
|
|
|
|
|
|
|
||
|
|
k |
|
|
k |
|
|
|
|
|
|
|
|
||
входа к выходу. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Таким |
|
образом, |
выходной |
|
сигнал |
определяется |
в форме |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y t my t Y t , причем центрированная случайная составляющая опи- |
|||||||||||||||
сывается дисперсией Dy. |
|
|
|
|
|
|
|
|
|
|
|
||||
|
Аналогичный подход используется при нахождении ошибки системы. |
||||||||||||||
|
|
|
|
|
|
|
|
mx t |
|
|
|
||||
Она определяется в форме: X t |
X t . Пусть на систему действу- |
||||||||||||||
ют детерминированное задающее воздействие g(t) и несколько некоррели-
рованных случайных возмущений k f k , k=1,2,…,K.
F t m k
t
F
t
Тогда математическое ожидание ошибки определяется в виде су ммы:
112

|
|
|
|
|
|
|
|
K |
|
|
|
|
|
K |
|
|
|
|
|
|
|
mx g - my xg |
уст |
mxf |
k |
xg |
уст |
myf |
k |
, |
|||||||
|
|
|
|
|
|
|
k 1 |
|
k 1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
t , Φx(p) - пе- |
|||||
где x |
g |
|
lim p |
p L g t , |
m |
yfk |
lim p y |
p L m |
fk |
|||||||||
|
уст |
p 0 |
x |
|
|
|
p 0 |
F |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
||||
редаточная функция системы по ошибке от задающего воздействия, Fyk p
- передаточная функция системы по k -му возмущающему воздействию, k =1,2,...,K.
Дисперсия ошибки совпадает с дисперсией выходного сигнала, опр е- деляемой в соответствии с (4.17). Примеры использования рассмотренного метода широко представлены в литературе [32, 33].
4.3. Статистическая линеаризация нелинейной стационарной системы
Если моделируемая система включает в себя хотя бы одно нелинейное звено, задача анализа протекающих в ней процессов существенно усложняется. Для нелинейных систем не выполняется принцип суперпозиции. Нелинейное звено вносит существенные искажения в закон распределения преобразуемого сигнала. Тем не менее возможность использования достаточно простых методов анализа случайных процессов, разработанных для линейных систем, удается здесь обеспечить на основе статистической линеаризации системы.
Статистической линеаризацией называется построение линейной м одели нелинейного звена системы управления с учетом характеристик преобразования случайного сигнала линейной частью системы.
Методы статистической линеаризации основаны на допущении о наличии у линейной части системы свойства фильтра. Благодаря этому, сигнал на входе нелинейного звена, то есть на выходе линейной части (рис. 38),
рассматривается |
в |
форме |
|
|
|
X t mx t X t , |
причем для |
|
описания центрированной |
состав- |
|
ляющей ограничиваются дисперсией Dx или среднеквадратическим отклонением σx. При нескольких входных сигналах для каждого использу-
113
ется аналогичное представление, а для описания совокупности центрированных составляющих - матрица моментов (4.12).
Статистическая линеаризация проводится для стационарных процессов или для фиксированных значений mx и σx нестационарного случайного процесса, соответствующих некоторо-
|
|
|
|
|
му |
|
рассматриваемому |
|
моменту |
|||
|
|
|
|
|
времени. |
|
|
|
|
|
||
|
|
|
|
|
|
|
Если |
|
статическая |
характери- |
||
|
|
|
|
|
стика нелинейного звена (x) одно- |
|||||||
|
|
|
|
|
значна и |
|
дифференцируема |
по |
||||
|
|
|
|
|
крайней мере для отрезка [mx-3σx; |
|||||||
|
|
|
|
|
mx+3σx] и x достаточно мала, |
|||||||
|
|
|
|
|
выполняется прямая линеаризация |
|||||||
|
|
|
|
|
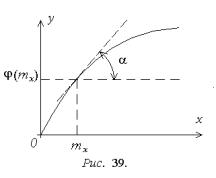
нелинейности в окрестности |
mx |
||||||
|
|
|
|
|
(рис. 39). В этом случае сигнал на |
|||||||
|
|
|
|
|
выходе нелинейного звена рассмат- |
|||||||
ривается в форме: |
|
|
|
|
|
|
x |
|
|
|
|
|
Y m |
|
' m |
|
X , |
' m |
|
|
tg , |
(4.18) |
|||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
x |
|
x |
|
x |
|
x mx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где (mx) и '(mx) - коэффициенты линеаризованной модели нелинейного звена, нелинейно зависящие от mx ; - угол наклона касательной к функции(x) в точке mx. Получаемая приближенная зависимость (4.18) оказывается линейной относительно центрированной составляющей входного сигнала
X , что равноценно замене исходной нелинейной статическо й характеристики звена касательной в точке, соответствующей mx.
Для нелинейного звена с несколькими входами статическая характеристика приводится к виду (x 1 ,x2 ,…,x n ). При выполнении для всех входных сигналов xi указанных выше условий прямая линеаризация осуществляется в следующей форме:
|
|
|
n x , x |
,...,x |
n |
|
|
|
||
|
|
|
|
|||||||
Y (mx |
, mx |
,...,mx ) |
1 |
2 |
|
|
|
X i , |
||
|
xi |
|
|
|
||||||
1 |
2 |
n |
i 1 |
|
|
|
|
x mx |
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X i mx |
X i , i=1,2,...,n, |
|
|
|
|
|||
i
где условие x=mx выполняется для всех аргументов функции .
114

Таким образом, принцип линеаризации стохастических нелинейных систем аналогичен принципу линеаризации детерминированных систем. Но здесь линеаризация производится не в окрестности состояния равновесия, а в окрестности средних значений (математических ожиданий) входных сигналов.
Если нелинейность является неоднозначной или имеет разрывы 1-го или 2-го рода в пределах отрезка [mx-3σx; mx+3σx], применяется статистическая линеаризация, состоящая в приближенной замене нелинейной характеристики звена эквивалентной в вероятностном смысле линеаризованной зависимостью между входными и выходной переменными.
Рассмотрим сначала звено с одним входом и статической характеристикой (x). В зависимости от вида статической характеристики возможны различные варианты получаемой линеаризованной зависимости.
Для однозначной нелинейности общего вида: Y 0 k1 X .
Для однозначной нечетной относительно входного сигнала нелинейности (-x)=- (x) коэффициент 0 выражают через математическое ожидание входного сигнала: 0 = k0 mx.
Для неоднозначной нелинейности линеаризованную зависимость полу-
чают в форме: Y |
|
k |
|
k |
|
|
|
dX |
|
|
X 1 |
|
X 2 , где X1 =X, X |
|
. |
||||
|
0 |
1 |
|
|
2 |
|
2 |
dt |
|
|
|
|
|
|
|
Коэффициент 0 называется средней статистической характеристикой нелинейности; коэффициент k0 - статистическим коэффициентом усиления по математическому ожиданию; коэффициенты k1 и k2 - статистическими коэффициентами усиления по случайным составляющим входных сигналов.
Значения коэффициентов статистической линеаризации определяют на основе критериев вероятностной эквивалентности. Обычно используют два критерия.
Первый критерий состоит в равенстве математических ожиданий и дисперсий сигналов на выходе статистически линеаризованного и исходного нелинейного звеньев. Для однозначной исходной нелинейности имеем:
|
|
|
|
|
my x f x dx , |
|
|
|
|
|
|
Dy |
x my 2 f x dx x 2 f x dx my2 , |
|
|
|
|
где f(x) - ПРВ сигнала X на входе нелинейного звена.
115

Математическое ожидание выходного сигнала линеаризованного звена M[Y] равно 0 (или k0 mx для нечетной нелинейности), а его дисперсия D[Y] связана с дисперсией и среднеквадратическим отклонением вхо дного сигнала в соответствии с (4.15):
D[Y ] k12 Dx k12 2x .
В результате получим:
|
|
|
|
x f x dx |
или k |
|
|
1 |
x f x dx , |
||||
|
|
|
m |
|
|||||||||
|
0 |
|
|
|
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
x |
|
||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
12 |
|
|
|
|
k1 |
|
x 2 |
f x dx 02 |
. |
|||||
|
|
|
|
|
|||||||||
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Знак в формуле (4.20) соответствует знаку производной x
(4.19)
(4.20)
в точке,
соответствующей mx.
Второй критерий состоит в минимизации среднего квадрата ошибки аппроксимации выходного сигнала нелинейного звена выходным сигналом линеаризованного звена:
|
|
|
|
|
|
2 |
|
|
|
x |
|
k |
|
|
2 |
, k min . |
|
2 M |
0 |
X |
||||||
|
|
1 |
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Раскроем скобки в выражении для 2 и применим к нему первое необходимое условие экстремума по 0 и k 1 :
|
|
|
2 |
2 x 0 |
|
|
|
|
|
|
|
||
2 M x 2 |
02 k12 |
X |
|
2 x k1 X 2 0k1 |
X |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
M x 2 2 k 2 D 2m 2k M x X |
, |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
x |
y |
0 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 0 2my 0 , |
|
|
|
|
|
||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
0 . |
|
|
|
|
|
2k D |
x |
2M |
x X |
|
|
|
|
|
||||
|
k1 |
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение полученных уравнений дает выражения для определения 0 и k 1 , доставляющих минимум 2:
116

k1 1 Dx
|
|
|
|
|
|
|
0 my x f x dx , |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
M x X |
|
|
|
x x mx f x dx . |
(4.21) |
|
|
|
|||||
|
|
|
Dx |
|
||
Отметим, что для 0 (и соответственно k0 ) оба критерия дают одинаковую расчетную формулу (4.19). Для k 1 получены различные расчетные формулы. Поскольку оба критерия считаются равноценными, обычно рекомендуют вычислять k1 как среднее арифметическое:
k |
k 1 k |
2 |
||
1 |
1 |
, |
||
|
|
|||
1 |
|
2 |
|
|
|
|
|
|
|
где k11 - значение, получаемое на основе первого критерия по (4.20); k12 -
значение, получаемое на основе второго критерия по (4.21).
Для нелинейного звена с несколькими входами линеаризация пр оизводится в форме:
n
Y 0 ki X i .
i 1
Здесь обычно ограничиваются использованием критерия минимума среднего квадрата ошибки, дающего наиболее простые расчетные соотношения:
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x , x |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
min . |
|
||||||||||
2 M |
,...,x |
n |
0 |
k |
i |
X i |
, k , k |
2 |
,...,k |
n |
|
|||||||||||||||||||
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Повторим выполненную ранее процедуру: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
n n |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
n |
|
|
|
|
||
2 M 2 |
02 ki X i k j X j |
2 0 2 ki X i |
2 0 ki |
X i |
|
|||||||||||||||||||||||||
|
|
|
i 1 j 1 |
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
i 1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M 2 2 |
|
n |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
||
|
|
k |
k |
M |
X i |
X j |
|
2m |
|
0 |
2 |
k |
M |
X i |
|
, |
|
|
||||||||||||
|
|
0 |
|
i |
|
j |
|
|
|
|
|
|
y |
|
|
i |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
i 1 j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
||
2 2 0 2my 0 ,0
117

2ki
|
|
где ij M X |
|
|
|
n |
|
|
2M |
|
x , x |
|
,...,x |
|
|
|
0 , i=1,2,...,n, (4.22) |
2 k |
ij |
|
2 |
n |
X i |
|
|||||
j |
|
|
1 |
|
|
|
|||||
j 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- корреляционные моменты связи входных сигналов. |
|
i X j |
||
|
|
|
В результате средняя статистическая характеристика нелинейности о п- ределяется как математическое ожидание сигнала на выходе звена:
0 = my =M[ (x1 ,x2 ,…,xn )],
акоэффициенты усиления по случайным составляющим входных сигналов
k i - из системы уравнений (4.22).
Вчастном случае при взаимно независимых входных сигналах звена ( i j
=0 при i≠j) из (4.22) получаем:
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
i |
|
|
M |
|
x .x |
2 |
,...,x |
n |
X i |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
Dx |
|
1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
mxi f1 |
x1 ... fn xn dx1...dxn , i=1,2,...,n, |
|||||||
|
... x1, x2 ,..., xn xi |
|||||||||||||||
|
||||||||||||||||
Dx |
||||||||||||||||
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Dxi = i i .
Все полученные расчетные соотношения для определения коэффициентов статистической линеаризации предусматривают использование ПРВ сигналов на входе линеаризуемого звена. В силу допущения о наличии у линейной части системы свойства фильтра, обычно используется ПРВ нормального закона распределения. Рассмотрим некоторые примеры.
Пример 1. Нелинейное звено (рис. 40) с идеальной релейной характеристикой (x)=c sign x.
Линеаризация |
выполняется |
в |
|
|
|
форме |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Y k0mx k1 X . Для определения k0 применим |
||||||||||||
формулу (4.19): |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
x mx 2 |
||
|
|
|
|
|
|
|
|
|
||||
k0 |
1 |
x f x dx |
1 |
|
csignx |
|
e |
|
2 2x dx |
|||
|
|
|
|
|
|
|||||||
|
|
2 |
|
|||||||||
|
mx |
|
mx x |
|
|
|
|
|
||||
118

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
0 |
|
1 |
|
|
|
x mx 2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
x mx |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 2x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 2x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
mx 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
x |
|
|
u |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
2 du |
|
|
|
|
2 |
|
du |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где u |
x mx |
|
|
|
- стандартизованная нормальная величина. И далее: |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
u |
2 |
|
|
|
|
mx |
x |
|
|
|
u |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
u |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
u |
2 |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
k0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
2 du |
|
|
|
|
e |
|
|
|
|
2 du e |
|
|
2 du |
|
|
|
e |
|
2 du |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
mx |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
x |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2c |
|
|
|
|
|
|
mx |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
mx |
0,5 |
|
x |
|
|
|
0,5 |
|
x |
|
|
|
|
mx |
|
|
|
x |
|
|
, |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
где Ф(u) - интеграл вероятностей, рассмотренный в разд. 3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Аналогично на основе (4.20), (4.21) можно получить: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
c2 |
|
|
|
|
|
x mx 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
c |
|
|
|
|
|
|
|
|
2 mx |
|
1 |
2 |
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 2x |
|
|
|
|
|
|
|
|
|
|
|
2 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx k0 mx |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
k1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
c x |
|
mx |
|
|
x mx 2 |
|
|
|
|
|
|
c x mx |
|
|
|
x mx 2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 2x |
|
|
|
|
|
|
|
|
|
|
|
|
2 2x |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
dx |
|
|
|||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
x |
|
|
|
x |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 x |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x mx |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x mx 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx2 |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
2c |
|
|
|
|
|
e |
|
|
|
2 2x |
|
|
d |
|
x mx |
|
|
|
|
|
|
|
|
2c |
|
|
|
|
|
|
e |
|
|
|
2 2x |
|
|
|
|
|
|
0 |
|
|
|
|
|
2c |
|
|
|
|
e 2 2x . |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
x |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Пример 2. Нелинейное звено имеет релейную характеристику с гистерезисом (рис. 41). Неоднозначную зависимость можно формально зам енить однозначной:
(x1 |
с |
при |
x1 b |
или |
x1 b |
и |
x2 |
0, |
|
, x2 ) |
при |
x b |
или |
x b |
и |
x |
|
0, |
|
|
c |
2 |
|||||||
|
|
|
1 |
|
1 |
|
|
|
|
119