

Лекция №3 Зубчатые передачи
Зубчатая передача является механизмом, который с помощью зубчатого зацепления передаёт или преобразует движение с изменением угловых скоростей и моментов. Это самый распространённый вид механических передач благодаря следующим преимуществам:
Высокая нагрузочная способность. Мощность, передаваемая парой колёс, достигает 50000 кВт;
Малые габариты. При одинаковом Ткр зубчатая передача по габаритам в10раз меньше ремённой;
Надёжность и большая долговечность;
Постоянство передаточного числа;
Высокий КПД. В прецизионных передачах =0,99;
Относительная простота эксплуатации.
Недостатки зубчатых передач:
1. Вибрация и шум при высоких скоростях. Это связано с точностью изготовления;
2. Большая трудоёмкость изготовления колёс высокой точности (шлифование и хонингование поверхностей).
Классификация зубчатых передач
Зубчатые передачи подразделяются:
1. По скорости:
а) тихоходные Vокр <3м/с;
б) быстроходные Vокр <15м/с;
в) скоростные Vокр >15 м/с; Vокр max =150м/с.
2. По типу колёс:
а) цилиндрические (рис. 3.1, а, б, в);
б) конические ( рис. 3.1, г, д, е).
3. По направлению зуба:
а) прямозубые, если направление зуба параллелельно образующей цилиндра или конуса;
б) косозубые, если направление зуба составляет постоянный угол с направлением образующей цилиндра или конуса (правый или левый наклон)(рис. 3.1, a, б);
в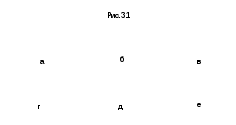 )
с криволинейным или круговым зубом
(рис. 3.1, б, е).
)
с криволинейным или круговым зубом
(рис. 3.1, б, е).
4. По положению валов:
а) с параллельными валами (цилиндрические);
б) с пересекающимися валами (конические);
в) с перекрещивающимися валами (винтовая, гипоидная).
Самостоятельно изучить: Конструкции зубчатых колёс, посадки на валы, материалы, изготовление колёс [1-5].
Понятие об эвольвенте
К зацеплению предъявляют три основных требования:
1. Во все фазы зацепления окружные скорости точек колёс должны быть постоянными, то есть должно выполняться условие U = const;
2. Направление усилия, действующего на зуб, должно быть постоянным;
3
Рис. 3.2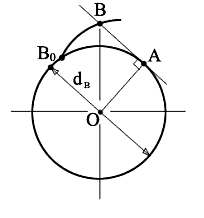
Этим условиям наиболее полно удовлетворяет эвольвентное зацепление.
Эвольвентой окружности называется кривая, описываемая точкой, лежащей на прямой, обкатываемой по окружности без скольжения (рис. 3.2).
Прямая, обкатываемая по окружности, называется производящейпрямой. Окружность, по которой обкатывается производящая прямая, называетсяосновнойокружностьюи обозначается dВ.
Свойства эвольвенты:
1. Нормаль к эвольвенте в любой точке является касательной к основной окружности.
2. Длина отрезка АВнормали к эвольвенте равна длине дугиАВ0основной окружности.
3. Точка Аосновной окружности есть центр кривизны эвольвенты в точкеВ.
Основная теорема зацепления
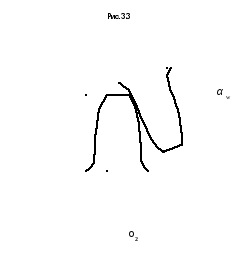
Рассмотрим эвольвентное зацепление (рис. 3.3). NN– общая нормаль двух эвольвент и для той и другой является производящей прямой, таким образом, во все фазы зацепления точка контакта лежит на прямойNN, поэтому линияNN называетсялинией зацепления.
Угол между линией зацепления и нормалью к линии, соединяющей центры колёс, называется углом зацепленияW.
Точка “W”пересечения линии зацепления и линии, соединяющей центры колёс, называетсяполюсом зацепления. Видно, что во все фазы зацепления полюс остаётся на месте. Участок линии зацепленияР1Р2, заключённый между окружностями головок зубьев, называетсяактивным участкомлинии зацепления.
Проведём векторы скоростей точек М (М1; М2)зацепленияV1 и V2 (они проводятся перпендикулярно своим радиусам - векторам в точкеМ). Из схемы разложения в прямоугольной системе координат скоростейV1 и V2 видно, что нормальная работа зацепления возможна только приVn1 = Vn2 :
![]() ;
;![]() .
.
Откуда
![]() или
или![]() ,
,
т. е. первое условие выполнено.
Последнее равенство называется основной теоремой зацепления. Эта теорема может быть сформулирована так: нормаль в точке соприкосновения элементов высшей пары качения и скольжения делит линию центров на части, обратно пропорциональные угловым скоростям.
Важно отметить, что в точке W нет взаимного скольжения зубьев, т. е.
![]() .
.
Это означает, что в процессе работы зацепления окружности с диаметрами dW1 иdW2 обкатываются без скольжения. Эти окружности называютсяначальными.
Из подобия
![]() и
и![]() следует,
что
следует,
что![]() .
Отсюда следует важное соотношение
.
Отсюда следует важное соотношение![]() .
.
Усилие в зацеплении направлено по общей нормали, то есть по линии зацепления, и, значит, постоянно по направлению (второе условие).