

Контактно – гидродинамическая теория смазки
Т
Рис.
13.5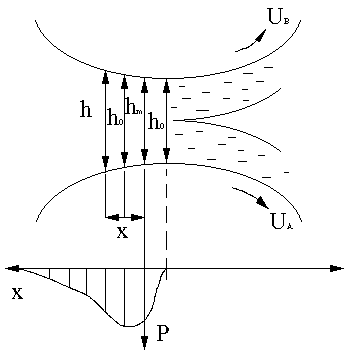
Классическая гидродинамическая теория не позволяет объяснить, почему в самых жестких по уровню напряжений условиях должна существовать смазка, почему она способна противостоять таким давлениям. Однако если допустить зависимость вязкости от давления и упругую деформацию контактирующих твердых тел, то можно показать, что существует удовлетворительная смазка в таких условиях.
Рассмотрим схематично упругий линейный контакт (см. рис 13.5). Здесь мы наблюдаем возникновение клиновидного зазора. Течение смазки в таком зазоре описывается уравнением Рейнольдса
![]() (13.1).
(13.1).
 В
таком контакте возникают огромные
давления и вязкость меняет свою величину
по приближенному закону Баруса:
=0
enp,
где0– динамический коэффициент при
атмосферном давлении,n
–пьезокоэффициент вязкости смазки.
В
таком контакте возникают огромные
давления и вязкость меняет свою величину
по приближенному закону Баруса:
=0
enp,
где0– динамический коэффициент при
атмосферном давлении,n
–пьезокоэффициент вязкости смазки.
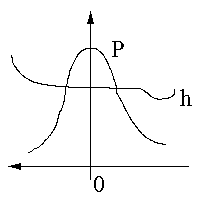
При действии гидродинамического давления происходит деформация поверхностей и меняется форма зазора между ними. Как известно, зазор между двумя круговыми цилиндрами до деформации на узком участке с большой точностью можно представить в виде квадратной параболы (рис.13.6)
Деформацию поверхности (прогиб) можно описать выражением
Рис.
13.7![]()
где А – коэффициент пропорциональности,Е – модуль упругости.
Форма зазора после деформации описывается уравнением
![]() (13.3)
(13.3)
где
![]() - приведенная кривизнаконтактирующих
тел, x
–
координата точки, где определяется
величина зазора.
- приведенная кривизнаконтактирующих
тел, x
–
координата точки, где определяется
величина зазора.
Совместное решение уравнений (13.1) и (13.3) дает распределение толщины смазочного слоя и гидродинамического давления по площадке контакта, в виде представленном на рис 13.7. Контактно-гидродинамическая теория смазки позволила объяснить наличие смазочной пленки достаточной толщины при значительных давлениях в условиях сосредоточенного линейного и точечного контактов. Она позволяет подбирать такие режимы трения, при которых возникает жидкостное трение.
Подшипники скольжения
О
Рис.
13.8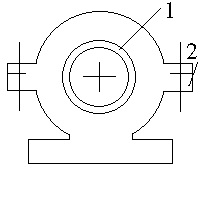
Р

 адиальные
подшипники - воспринимают только
радиальные нагрузки (рис. 13.9, а);
адиальные
подшипники - воспринимают только
радиальные нагрузки (рис. 13.9, а);Упорные подшипники (подпятники) – воспринимают только осевые нагрузки; в авиации к ним относятся ещё шарнирные опоры в механизмах управления (рис. 13.9, б).
Преимущества перед подшипниками качения:
М
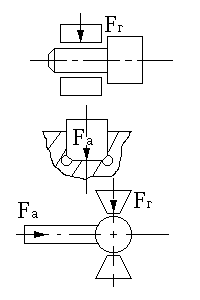
Рис. 13.9
еньше потери на трение при жидкостном трении на больших скоростях.Теоретически бесконечный ресурс при жидкостном трении.
Способность демпфирования.
Н едостатки:
едостатки:
Высокая стоимость и малая технологичность.
Потребность в большом количестве смазки.
Большой пусковой момент.
Самый благоприятный режим работы подшипника скольжения – жидкостный. Он возникает при достаточно больших скоростях скольжения. При пуске или остановке машины может возникнуть режим полужидкостного трения или граничного трения, поэтому вал и вкладыш подшипника должны составлять антифрикционную пару, например: вал стальной, вкладыш бронзовый или баббитовый.