

Тема 3. Датчики перемещения
Датчики перемещения предназначены для преобразования механического перемещения (линейного или углового) в электрический сигнал. Это одни из самых многочисленных видов датчиков в системах автоматического управления. Кроме применения непосредственно для измерения перемещений, эти датчики широко используются в составе датчиков других физических величин, в которых происходит промежуточное преобразование измеряемой величины в перемещение. Например, в датчиках давления с помощью упругих элементов (мембран, сильфонов и т.п.) изменение давления преобразуется в перемещение, преобразуемое в электрический сигнал с помощью датчиков перемещения.
3.1 Потенциометрический датчик перемещения
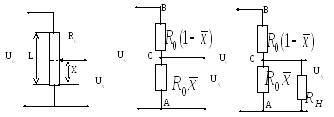
Одним из самых простых является потенциометрический датчик перемещения. Он представляет собой переменный резистор – реостат с подвижным контактом. Если к резистору приложить напряжение питания U0, то при перемещении подвижного контакта («щетки») разность потенциалов между щеткой и одним из полюсов источника питания будет зависеть от положения щетки. Это означает, что такой реостат может выполнять функцию датчика положения (перемещения) щетки.
На
рис 28а показана схема включения
потенциометрического датчика, а на рис
28б эквивалентная расчетная схема. Точка
подключения щетки к потенциометру
(точка С) делит сопротивление резистора
R0
на два участка – от точки А до точки С
и от точки С до точки В. Положение щетки
определяется расстоянием Х
от точки А до точки С.
Полная рабочая длина потенциометра от
точки А до точки В равна L.
Для удобства записи введем относительное
перемещение щетки
![]() .
Если сопротивление потенциометраR0
равномерно
распределено по его длине, то сопротивление
отдельных участков потенциометра
составит
.
Если сопротивление потенциометраR0
равномерно
распределено по его длине, то сопротивление
отдельных участков потенциометра
составит
![]() ,
,![]() .
Рассмотрим сначала работу датчика на
холостом ходу, без под ключения
нагрузочного резистора. В этом случае
ток в нагрузку не ответвляется и на
выход поступает падение напряжения на
участке АС.
.
Рассмотрим сначала работу датчика на
холостом ходу, без под ключения
нагрузочного резистора. В этом случае
ток в нагрузку не ответвляется и на
выход поступает падение напряжения на
участке АС.
![]() .
.
а) б) в)
Рис.28
К расчету статической характеристики потенциометрического датчика перемещения
Учитывая,
что в рассматриваемой схеме
![]() ,
,
получаем
![]() . (12)
. (12)
Из
этой формулы следует, что статическая
характеристика рассматриваемого датчика
должна быть линейной. Однако реально
эта характеристика состоит из ограниченного
отрезка прямой линии, существующей
только при
![]() (рис.29).
(рис.29).
Поскольку входной сигнал Х в рассмотренной схеме не может принимать отрицательных значений (щетка выйдет за пределы рабочего участка потенциометра), этот вариант датчика является однотактным (нереверсивным) элементом.

Рис.29
Статическая характеристика однотактного потенциометрического датчика
В реальных цепях к потенциометрическому датчику подключается нагрузка, имеющая сопротивление RН. (рис.28в). Сопротивление нагрузки RH шунтирует участок RAC потенциометрического датчика, что приводит к увеличению тока через участок RCB и увеличению падения напряжения на этом участке. Поскольку напряжение источника питания остается неизменным, напряжение на выходе датчика уменьшается, т.е. возникает ошибка при формировании сигнала.
Для
схемы на рис 28в ![]() ,
,
где
 .
.
Подставив J в выражение для Ux, получим
![]()
![]() .
.
Разделив числитель и знаменатель на RH*R0, получим
![]()
 .
.
Отношение
![]() называетсякоэффициентом
нагрузки и
обозначается символом β.
называетсякоэффициентом
нагрузки и
обозначается символом β.
С учетом этого обозначения
![]() . (13)
. (13)
Статическая
характеристика потенциометрического
датчика при подключении его к нагрузке
становится нелинейной. Величина этой
нелинейности зависит от коэффициента
нагрузки β.
Нетрудно проверить, что при β=0
статическая характеристика линейна. В
различных точках характеристики
отклонение от линейной зависимости
различное. Отметим, что при
![]()
![]() и
и![]() ошибка обращается в ноль даже при
ошибка обращается в ноль даже при![]() .
Общий вид статической характеристики
потенциометрического датчика при
подключенномRH
показан на
рис. 30.
.
Общий вид статической характеристики
потенциометрического датчика при
подключенномRH
показан на
рис. 30.

Рис.30.
Статическая характеристика потенциометрического датчика при подключенном RH
Найдем
величину относительной погрешности
(отклонения от линейной зависимости)
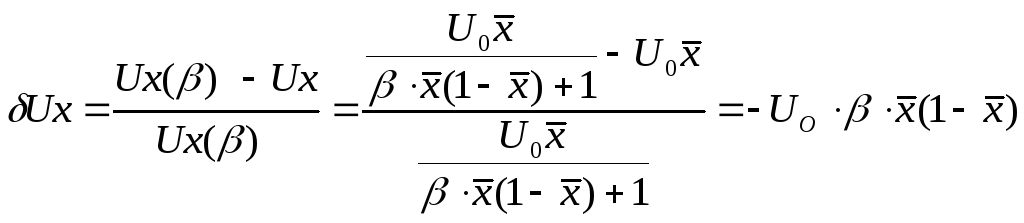 .
.
Максимального
значения относительная погрешность
достигает при значении
![]() ,
при котором
,
при котором![]() .
.
![]() ,
откуда
,
откуда
![]() =0,5.
=0,5.
Подставив
![]() =0,5
в выражение дляδUx
, найдем
=0,5
в выражение дляδUx
, найдем
![]() .Это
означает, что для обеспечения погрешности
от влияния нагрузки не более 0,01 (1%)
величина β должна быть не более 0,04.
Соответственно, сопротивление нагрузки
должно не менее чем в 25 раз превышать
сопротивление потенциометра. В случаеRH=R0
коэффициент
нагрузки β=1
и относительная погрешность составляет
0,25 (25%).
.Это
означает, что для обеспечения погрешности
от влияния нагрузки не более 0,01 (1%)
величина β должна быть не более 0,04.
Соответственно, сопротивление нагрузки
должно не менее чем в 25 раз превышать
сопротивление потенциометра. В случаеRH=R0
коэффициент
нагрузки β=1
и относительная погрешность составляет
0,25 (25%).
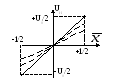
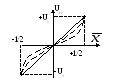
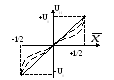
Рассмотренный потенциометрический датчик является однотактным элементом, но в системах управления чаще всего требуются двухтактные (реверсивные) датчики. Для получения двухтактной статической характеристики можно использовать следующий прием – перенести систему координат в середину статической характеристики исходного однотактного датчика (рис. 31). В новой системе координат статическая характеристика становится двухтактной. Реализовать такой перенос системы координат можно различными способами.
Один из способов заключается в присоединении дополнительного вывода к середине обмотки и использовании в качестве выходного сигнала разности потенциалов между выводом от средней точки и подвижной щеткой (вариант 1, таблица 3). Если в конструкции потенциометра вывод от средней точки отсутствует, в схему датчика можно ввести искусственную среднюю точку с помощью делителя напряжения и выходной сигнал снимать между этой искусственной средней точкой и щеткой (вариант 2, таблица 3).

Рис.31
Статическая характеристика двухтактного потенциометрического датчика.
Недостатком рассмотренных схем двухтактных потенциометрических датчиков является уменьшение максимального выходного сигнала до U0/2. Преодолеть этот недостаток можно, используя мостовую схему включения (варианты 3 и 4, таблица 3). В этом случае в состав датчика входят два идентичных потенциометра, у которых движение щеток жестко синхронизировано. Для мостовой схемы максимальная величина выходного сигнала составляет ±U0 .
Таблица 3
|
|
Схема включения |
Влияние нагрузки (β=R/RH) |
Статическая характеристика |
|
1 |
|
|
|
|
2 |
R1 R1 RH xx U0 UH |
где β1=R1/RH |
|
|
3 |
U0 |
|
|
|
4 |
|
|
|
















Для всех схем включения потенциометрических датчиков сохраняется влияние сопротивления нагрузки (коэффициента нагрузки β) на величину погрешности статической характеристики, но количественно величина погрешности для каждой схемы включения подсчитывается по своим формулам, которые можно вывести, рассчитав выходной сигнал по соответствующей эквивалентной электрической схеме.
В таблице 3 для каждой схемы приведены выражения для статической характеристики при RH ≠ 0 и вид статических характеристик.
Кроме
погрешности, вызванной влиянием
сопротивления нагрузки, у потенциометрических
датчиков, имеющих обмотку, присутствует
погрешность, обусловленная конечным
числом витков обмотки – погрешность
ступенчатости (рис.32). Эта погрешность
вызвана тем, что подвижный контакт при
перемещении изменяет сопротивление
![]() и
и![]() (рис 28 б) ступенями, равными сопротивлению
одного витка обмотки. Максимальное
значение погрешности ступенчатости
составляет
(рис 28 б) ступенями, равными сопротивлению
одного витка обмотки. Максимальное
значение погрешности ступенчатости
составляет
![]() ,
(14)
,
(14)
где w – число витков обмотки потенциометра.

Рис. 32
Погрешность ступенчатости статической характеристики потенциометрического датчика.
Поскольку обмотка датчика является практически активным (омическим) элементом (см. пункт «Динамические свойства потенциометрических датчиков»), потенциометрический датчик может питаться как от источника постоянного, так и переменного тока. Все особенности статической характеристики, включая реверсивность для двухтактных схем включения, сохраняются (проверить самостоятельно).