

12.1 Измерение путевой скорости с помощью эффекта Доплера
Эффект Доплера проявляется в изменении принимаемой частоты fПР по сравнению с передаваемой fПЕР при наличии относительной скорости передатчика и приемника:
![]() , (69)
, (69)
где VОТН – относительная скорость, с – скорость распространения волны, излучаемой передатчиком (для радиоволн с=300000 км/сек), ΔfДОП. – доплеровское смещение частоты.
Для определения путевой скорости полета самолета на нем устанавливается передатчик с узконаправленной антенной, ориентированной в направлении на поверхность земли (рис.119).
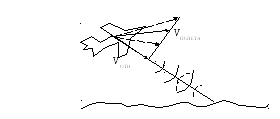
Рис.119
Измерение скорости полета с помощью эффекта Доплера.
Радиоволна с частотой fПЕР, излученная антенной, распространяется в направлении поверхности земли, отражается от поверхности земли и часть отраженных радиоволн достигает антенны и воспринимается приемником на частоте fПР, равной
![]()
![]() , (70)
, (70)
т.к. эффект Доплера проявляется дважды – при распространении радиоволны от антенны передатчика до поверхности земли и обратно.
Замерив доплеровское смещение частоты ΔfДОП , можно определить проекцию скорости полета на направление оси диаграммы направленности антенны
![]()
Относительное смещение ΔfДОП / fПЕР величина очень малая. Так при относительной скорости полета 800 км/час (≈222 м/с) отношение ΔfДОП / fПЕР = 7,4 10-7. Так, если fПЕР= 1000 Мгц, то ΔfДОП=7,4 10-7*109=740 Гц. Обнаружить слабый отраженный сигнал на частоте 1000,000740 Мгц на фоне существенно большего по мощности передаваемого сигнала частотой 1000,000000 Мгц обычными методами фильтрации практически невозможно.
Но в электронике и радиотехнике найден способ решения этой задачи. Он основан на использовании явления «биений», которое возникает при сложении гармонических колебаний с близкими частотами.
Пусть передаваемый сигнал имеет амплитуду U1 и частоту ω, а принимаемый сигнал имеет амплитуду U2 и частоту ω+Δω, причем U2 << U1 и Δω << ω . Если амплитуды слагаемых колебаний постоянны, то
![]()
и получаются колебания на частоте ω модулированные по амплитуде синусоидой с частотой Δω. Благодаря большой разности частот ω и Δω, огибающая этого сигнала, представляющая собой сигнал на частоте доплеровского сдвига, легко выделяется с помощью амплитудного детектора.
Одной антенны недостаточно для измерения путевой скорости полета, т.к. относительная скорость, измеренная доплеровским методом, может быть одинаковой при различных значениях скорости полета (пунктирные векторы на рис.119).
Для измерения всех трех компонент путевой скорости по осям X, Y и Z необходимо проводить измерения доплеровских смещений частоты, по крайней мере, по трем некомпланарным направлениям. На практике наиболее часто применяется четырехлучевая система излучения и приема сигналов, показанная на рис.120.
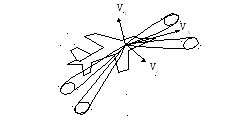
Рис.120.
Четырехлучевая система Доплеровского измерителя скорости и сноса (ДИСС).
Достоинством доплеровской системы является то, что она измеряет непосредственно путевую скорость полета и не требует дополнительной метеоинформации.
Основной недостаток доплеровской системы состоит в необходимости излучения мощного радиосигнала с борта самолета в направление земли. Это требует мощной бортовой аппаратуры и демаскирует самолет в полете.