

15.1 Магнитоупругие датчики усилия
Некоторые ферромагнитные материалы обладают свойством изменять магнитную проницаемость при воздействии механического напряжения. Для феромагнетиков характерной особенностью является нелинейность кривой намагничивания (зависимость индукции в материале В от напряженности магнитного поля Н). Наличие нелинейности свидетельствует об изменении магнитной проницаемости материала от напряженности магнитного поля. Типичный вид кривой намагничивания В(Н) и зависимость (Н) показаны на рис.134 сплошными линиями.
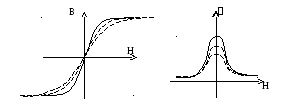
Рис.134
Изменение свойств магнитного материала при действии механического напряжения.
Под действием механического напряжения возникающего при воздействии усилия вид кривой намагничивания и зависимость (Н) изменяются. Магнитная проницаемость уменьшается. Если этот ферромагнетик использовать в качестве магнитопровода и разместить на нем обмотку, то индуктивность этой обмотки будет зависеть от величины механического напряжения. Для примера рассмотрим обмотку с сердечником, показанную на рис.135.

Рис.135
Схема магнитоупругого датчика усилия.
Индуктивность
обмотки можно найти по формуле
![]() ,
где
,
где![]() .
.
Здесь lСР – средняя длина магнитной силовой линии, S – площадь сечения магнитопровода, w – число витков обмотки, 0=410-7 гн/м – константа (абсолютная магнитная проницаемость вакуума), - относительная магнитная проницаемость материала.
Поскольку при действии механического усилия магнитная проницаемость материала уменьшается, увеличивается магнитное сопротивление и, соответственно, уменьшается индуктивность обмотки. Изменение индуктивности можно преобразовать в электрический сигнал. Варианты таких преобразований рассмотрены при изучении индуктивных датчиков перемещения.
Уменьшение магнитной проницаемости материала не зависит от знака механических напряжений – растяжения или сжатия. Поэтому для создания двухтактных (реверсивных) магнитоупругих датчиков усилия требуется специальная конструкция датчика в которой положительное усилие воспринимается одним, а отрицательное усилие – другим магнитоупругим датчиком, обмотки которых включены в дифференциальную схему формирования выходного сигнала. (рис. 136).
В этом датчике используются два идентичных магнитоупругих элемента 1 и 2, на которых установлены обмотки 3,4. Магнитоупругие элементы установлены между основанием 5 и силовой рамой 6. Измеряемая нагрузка прикладывается к раме 6. Если усилие направлено сверху вниз, то воспринимает это усилие верхний магнитоупругий элемент 1, а нижний элемент 2 остается ненагруженным. Индуктивность обмотки 3 верхнего элемента 1 уменьшается и на выходе электрической схемы появляется напряжение соответствующее величине приложенного усилия. Если усилие направлено снизу вверх, то воспринимает это усилие нижний магнитоупругий элемент 2, а верхний элемент 1 остается нена-

Рис. 136
Двухтактный магнитоупругий датчик усилия.
груженным. Индуктивность обмотки 4 нижнего элемента 2 уменьшается и на выходе электрической схемы появляется напряжение, соответствующее величине усилия и отличающееся по фазе на 1800.
К достоинствам магнитоупругих датчиков следует отнести простоту конструкции, отсутствие подвижных частей, надежность, возможность измерения больших усилий.
Основной недостаток – нестабильность магнитных свойств материала и гистерезис при деформации, что снижает точность измерения.