

Тема 8. Оптоэлектронные дискретные датчики перемещения.
8.1 Оптико-электронный датчик перемещения накапливающего типа (инкрементный энкодер)
Работа оптико-электронного датчика перемещения накапливающего типа основана на модуляции светового потока от источника света к фотоприемнику при перемещении подвижной части датчика. Основными элементами конструкции датчика являются (рис.76):
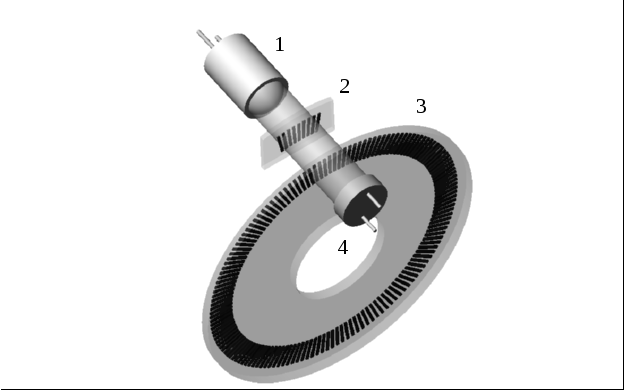
Рис.76.
Схема оптоэлектронного датчика перемещения накапливающего типа.
1 – источник света,
2 – неподвижная растровая решетка,
3 – подвижная растровая решетка,
4 – фотоприемник.
Растровые решетки 2,3 имеют чередующиеся в виде полос с постоянным шагом прозрачные и непрозрачные участки. Излучение от источника света 1 проходит через неподвижную 2 и подвижную 3 растровые решетки на фотоприемник 4. Количество света поступающего на фотоприемник будет изменяться при смещении подвижной растровой решетки относительно неподвижной (рис.77). При совпадении прозрачных участков подвижной и неподвижной решеток световой поток на фотоприемнике достигает максимального значения. При смещении подвижной решетки относительно неподвижной световой поток на фотоприемнике будет уменьшаться, т.к. часть светового потока прошедшего через прозрачные участки неподвижной решетки будет задержана непрозрачными участками подвижной решетки. При смещении подвижной решетки относительно неподвижной на половину шага полос световой поток на фотоприемнике будет теоретически равен нулю. На практике из-за явления дифракции световой волны на границе полос, неточности изготовления полос и их расположения световой поток на фотоприемнике не будет равен нулю, но примет минимальное значение. При дальнейшем перемещении подвижной решетки количество света на фотоприемнике начет возрастать и опять достигнет максимального значения, когда решетка сместится точно на шаг полос. В результате при движении подвижной решетки световой поток на фотоприемнике периодически изменяется. Соответственно выходной сигнал фотоприемника также будет периодически изменяться. Этот сигнал усиливается предусилителем и поступает в схему обработки.
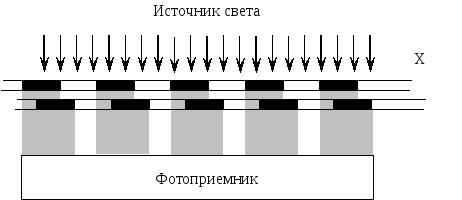
Рис.77
Формирование светового потока на фотоприемник.
Коэффициент электрической редукции датчика определяется числом полос растра на растровом диске. Современные технологии позволяют изготавливать растровые решетки с числом полос до ста и более на миллиметр. Если взять диск диаметром 50 миллиметров и изготовить на нем решетку с 20 штрихами на миллиметр, то количество полос (коэффициент электрической редукции) составит
![]()
Такая
большая величина электрической редукции
у растровых датчиков позволяет при
решении многих задач ограничиться
измерением угла простым методом «подсчета
полос». При N=3000 один шаг соответствует
углу поворота
![]() ,
чего бывает достаточно при решении
многих задач управления.
,
чего бывает достаточно при решении
многих задач управления.
Для реализации алгоритма «подсчета полос» схема обработки сигнала должна содержать формирователь логических сигналов и счетчик (рис.78).

Рис.78
Схема обработки сигнала фотоприемника.
Преобразование сигнала с предусилителя в логический сигнал выполняет компаратор (К). Поскольку с фотоприемника поступает однополярный сигнал, для работы компаратора требуется опорное напряжение равное среднему значению сигнала с фотоприемника. В этом случае на выходе компаратора будут сформированы симметричные импульсы.
Недостатком такой схемы является высокая чувствительность к изменению амплитуды первичного сигнала с фотоприемника. Амплитуда этого сигнала зависит от чувствительности фотоприемника, которая существенно изменяется от температуры, величины светового потока от осветителя, которая зависит от напряжения питания, от изменения прозрачности дисков, вызванной запылением их поверхности и т.д. Изменение амплитуды сигнала с фотоприемника по отношению к опорному напряжению приведет к изменению соотношения длительности импульсов и пауз выходного сигнала компаратора и может привести к пропаданию импульсов, т.е. отказу в работе датчика.
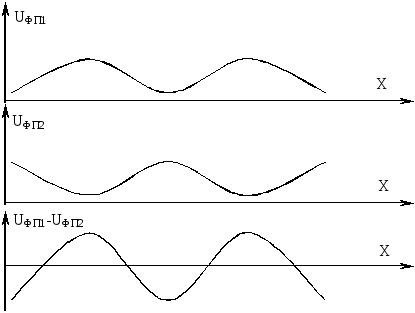
Для исправления этого недостатка необходимо оперативно изменять величину опорного напряжения, подаваемого на компаратор. Наиболее эффективным способом решения этой задачи явилось использование двух идентичных каналов считывания сигналов, содержащих вторую неподвижную растровую решетку и второй фотоприемник. Источник света лучше использовать один на оба канала. Штрихи неподвижной решетки второго канала должны быть смещены на половину шага по отношению к штрихам решетки первого канала. В этом случае фотоприемники будут формировать почти идентичные сигналы, в которых постоянные составляющие практически совпадают по величине, а переменные составляющие сдвинуты на половину периода (рис.79а). Если произвести вычитание сигналов двух каналов получится переменный сигнал удвоенной амплитуды не содержащий постоянной составляющей, что существенно улучшает работу компаратора и снижает влияние различных факторов (изменения температуры и напряжения питания) на качество сигнала (рис.79б).
Каждый сформированный компаратором импульс соответствует перемещению подвижного диска на один шаг растровой решетки. Подсчет перемеще-
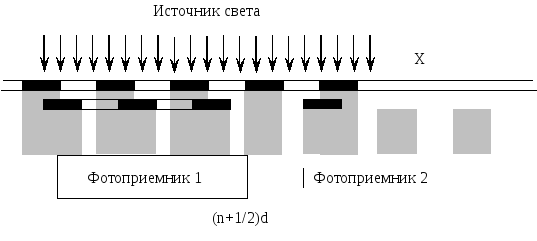
а
б
Рис.79
Использование двух каналов для устранения постоянной составляющей сигналов с фотоприемников.
ния (счет импульсов) производится счетчиком (СЧ), на выходе которого формируется двоичный код соответствующий произошедшему перемещению.
Рассмотренный датчик перемещения обладает рядом недостатков, которые требуется устранить, чтобы получить эффективное средство измерения перемещений.
Первый недостаток иллюстрируется на рис.80. Предположим, что вал, угол поворота которого следует измерить, совершает затухающее колебательное движение. Подвижный диск перемещается, световой поток на фотоприемниках периодически изменяется, электронная схема формирует импульсы, счетчик их подсчитывает. Результат подсчета показан на рис.80 сплошной линией. Видно, что результат подсчета принципиально расходится с измеряемым перемещением.
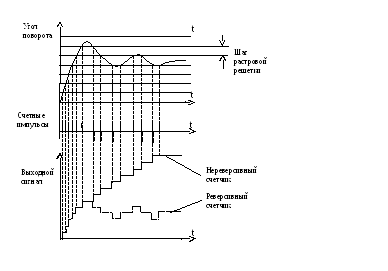
Рис.80
Формирование выходного сигнала датчика накапливающего типа.
Причина этого расхождения в том, что направление движения вала в процессе измерения изменяется на противоположное, но электронная схема этого «не замечает», и продолжает суммировать поступающие импульсы, тогда как некоторые из импульсов следует не прибавлять, а вычитать. Необходимо определять не только величину, но и направление перемещения.
Для определения направления движения подвижной растровой решетки необходимо организовать еще один канал (осветитель, неподвижная растровая решетка, фотоприемники) действующий аналогично первому, но его импульсы должны быть смещены относительно импульсов первого канала на четверть периода полос. Это достигается смещением полос неподвижной решетки второго канала на целое число плюс одна четвертая часть шага полос относительно штрихов неподвижной решетки первого канала. Электронная схема будет содержать два канала формирования импульсов, реверсивный счетчик импульсов и схему управления счетчиком.
Организация реверсивного подсчета импульсов реверсивным счетчиком зависит от структуры счетчика. У некоторых счетчиков есть два счетных входа. Импульсы, поданные на один из входов, увеличивают содержимое счетчика, импульсы, поданные на другой вход, уменьшают. Другие счетчики имеют только один счетный вход и дополнительный управляющий вход, сигнал на котором задает увеличение или уменьшение содержимого счетчика по сигналу счетного входа. На рис.81а представлены сигналы двух каналов формирования импульсов при перемещении подвижной растровой решетки.
Предположим, что счетчик реагирует на передний фронт счетных импульсов, в качестве которых приняты импульсы первого канала. Отметим, что при движении подвижной растровой решетки слева направо передние фронты импульсов первого канала приходятся на единичное состояние сигнала второго канала, а при движении подвижной растровой решетки справа налево передние фронты импульсов первого канала приходятся на нулевое состояние сигнала второго канала. Если использовать реверсивный счетчик с одним счетным (СЧ) и дополнительными управляющими входами (V и R), схема управления реверсивным подсчетом импульсов примет вид, показанный на рис.81б. счетчик изменяет свое состояние на единицу по переднему фронту импульса UC. Направление счета – увеличение или уменьшение содержимого счетчика (кода на выходе) определяется состоянием управляющего входа V, на который подается сигнал US.
При движении в положительном направлении в момент появления переднего фронта импульса UC на входе V будет состояние «1» и содержимое счетчика увеличивается на единицу. При движении в отрицательном направлении в момент появления переднего фронта импульса UC на входе V будет состояние «0» и содержимое счетчика уменьшается на единицу.
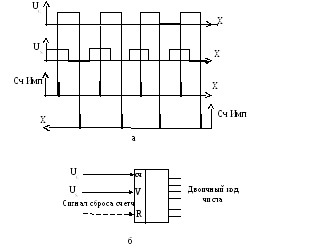
Рис.81
Учет направления перемещения в датчике накапливающего типа.
Второй недостаток рассматриваемого датчика состоит в том, что он не имеет начала отсчета. Фактически он измеряет приращение угла поворота вала. В системах управления чаще необходимо измерять на приращение, а абсолютное
значение угла. Для исправления этого недостатка в датчике перемещения накапливающего типа приходится создавать еще один оптико-электронный канал, который выдает импульс при прохождении валом определенного положения относительно корпуса прибора (реперной точки). Этот канал имеет источник света и по одной узкой прозрачной щели на подвижном и неподвижном диске. При совпадении этих прозрачных щелей на фотоприемник поступает свет, и схема обработки выдает сигнал на вход R счетчика. По этому сигналу показания счетчика импульсов обнуляются (операция Reset).
Процессы в новой электронной схеме иллюстрируются рис.80 пунктирными линиями.
Основными показателями качества датчика является количество «дискрет», т.е. элементарных приращений угла поворота вала регистрируемого датчиком и точность – соответствие результата измерения действительному углу поворота. Точность определяется, прежде всего, конструктивными и технологическими показателями – точностью нанесения штрихов растровой решетки и обеспечения точности позиционирования диска на валу (эксцентриситет растровой решетки и люфт подшипников вала). Количество дискрет может быть увеличено за счет увеличения количества штрихов (изменение конструкции растрового диска увеличением диаметра диска или уменьшением шага растровой решетки) или за счет более полной обработки получаемой от фотоприемников информации без увеличения количества штрихов.
На рис.80 видно, что электронная схема регистрирует приращение на один дискрет при повороте вала на целый шаг растровой решетки. Это обеспечивает количество дискрет равное числу полос решетки. Если точность изготовления штрихов растровой решетки позволяет, можно без увеличения количества штрихов увеличить число дискрет. Простейший вариант, позволяющий вдвое увеличить количество дискрет – построить схему управления реверсивным счетчиком реагирующую не только на передние, но и на задние фронты счетных импульсов.
Для того чтобы вчетверо увеличить количество дискрет, необходима схема управления реверсивным счетчиком реагирующая на передние и задние фронты обоих сигналов, сформированных компараторами (рис.82). Такая схема формирует четыре счетных импульса на один шаг растровой решетки, что и дает увеличение в четыре раза разрешающей способности датчика.
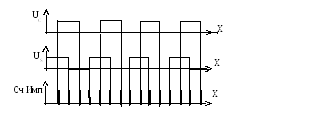
Рис. 82.
Увеличение разрешающей способности растрового датчика.
Еще больший эффект увеличения количества дискрет можно получить с помощью «электронного дробления фазы» - приема, позволяющего измерять долю шага решетки. Из рис.79б видно, что сигналы на входе в компараторы по форме близки к напряжениям на синусоидальной и косинусоидальной обмотках СКВТ в амплитудном режиме. Поэтому можно использовать те же методы обработки сигналов, которые были рассмотрены при рассмотрении СКВТ.
При достаточно хорошей форме сигналов, когда их форма мало отличается от синусоидальной, в настоящее время с помощью микропроцессорной техники удается реализовать «электронное дробление фазы» на 100 – 200 частей, увеличив количество дискрет в 100 – 200 раз по сравнению с числом полос растровой решетки.