

Тема 9. Определение углового положения летательных аппаратов
Общей особенностью всех рассмотренных датчиков перемещения является наличие двух частей – корпуса и подвижной части датчика. Все эти датчики измеряют положение подвижной части датчика относительно корпуса датчика. При измерении углового положения летательного аппарата (ЛА) в пространстве все рассмотренные типы датчиков непосредственно применены быть не могут. Пространственное положение ЛА принято отсчитывать с использованием осей, ориентированных относительно Земли. На рис. 92 показано произвольное положение ЛА в пространстве и угловые координаты, характеризующие это положение. /2 с.17/
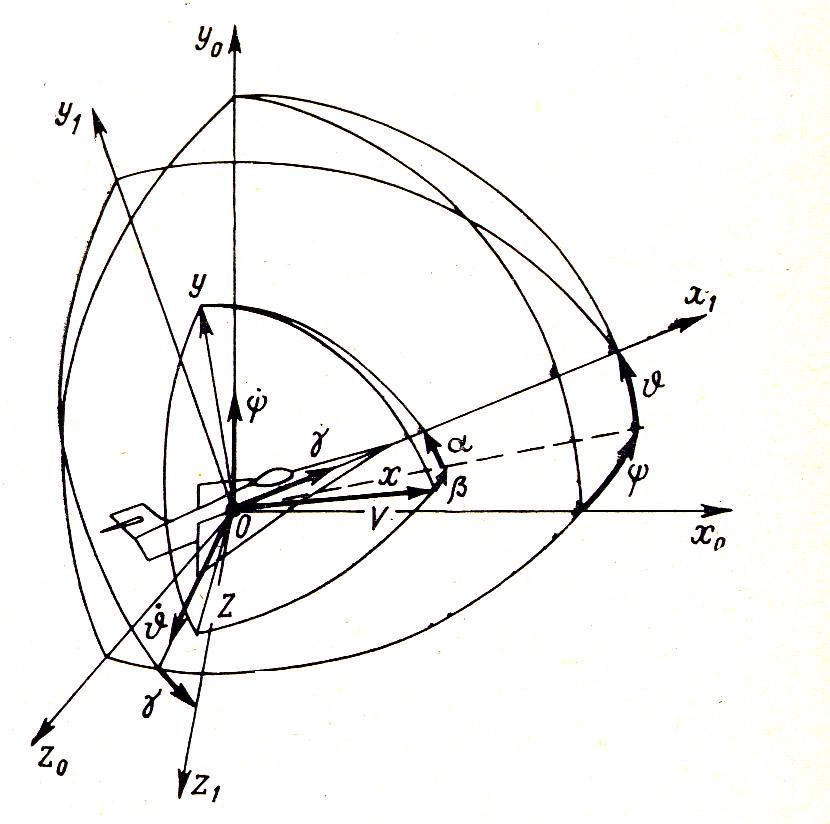
Рис. 92
Системы координат, определяющие положение ЛА в пространстве.
В рассмотрение вводятся две системы координат – «земная подвижная» и «связанная». Начало обеих систем координат расположено в центре масс ЛА (точка О). Оси Оx0 и Оz0 земной подвижной системы координат лежат в горизонтальной плоскости, ось Ox направлена по меридиану на Север, ось – Оy0 вертикальна.
В связанной системе координат оси направлены по главным центральным осям инерции аппарата: ось Оx1 по продольной оси, ось Оy1 вверх в плоскости симметрии, ось Оz1 перпендикулярно плоскости симметрии.
Положение связанной системы координат относительно земной подвижной, т.е. угловое положение ЛА, характеризуется тремя углами:
- угол курса (рыскания) φ – между направлением оси Ox0 и вертикальной плоскостью, проходящей через ось Оx1 ;
- угол тангажа υ – между плоскостью горизонта и осью Оx1 ;
- угол крена γ – угол поворота ЛА вокруг собственной продольной оси Оx1 относительно горизонтального положения.
Из приведенного определения углов следует, что для измерения углов тангажа υ и крена γ необходимо знать направление плоскости горизонта или, что тоже самое, направление вертикали Оy0. Для измерения угла курса φ необходимо знать направление на Север (плоскость меридиана).
В стационарных наземных условиях направление вертикали определяется с помощью отвеса – маятника. На летательном аппарате маятник как средство определения вертикали неприменим по причине, рассмотренной в разделе «датчики ускорения». Поэтому необходимо другое средство для определения вертикали, способное работать на борту ЛА.
Удобным инструментом для решения задачи построения вертикали (горизонтальной плоскости) стал гироскоп. Схематически устройство трехстепенного астатического гироскопа показано на рис. 93. Гироскоп состоит из ротора (1), внутренней (2) и внешней (3) рамок карданова подвеса. Оси подвеса рамок и ось вращения ротора пересекаются в одной точке, которая остается неподвижной.
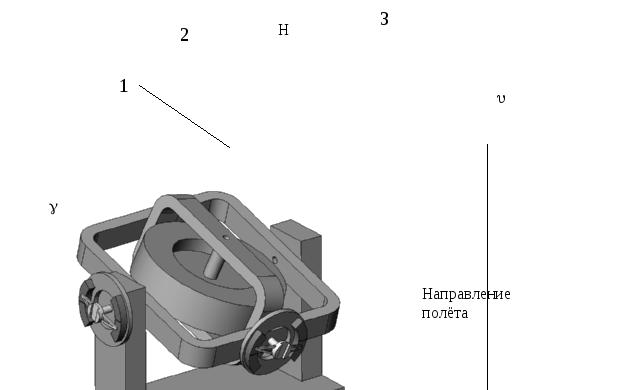
Рис. 93.
Трехстепенной гироскоп.
Ротор имеет три степени свободы – поворот вокруг собственной оси и осей рамок. Кинетический момент ротора выражается формулой /8/.
![]() , (50)
, (50)
где
Jx,
Jy,
Jz
– моменты
инерции гироскопа относительно
соответствующих осей, а
![]() ,
,![]() и
и![]() проекции угловой скорости вращения
ротора на оси гироскопа.
проекции угловой скорости вращения
ротора на оси гироскопа.
Если ротору придать большую угловую скорость вращения вокруг собственной оси ωy= Ω во много раз превышающую угловые скорости вокруг других осей
Ω>> ωx, ωz,
то практически весь кинетический момент ротора будет сосредоточен в его собственном вращении
![]()
По известной теореме о производной от кинетического момента по времени можно записать
![]() , (51)
, (51)
где
![]() -
вектор внешнего момента, действующего
на ротор. Если внешний момент отсутствует
(
-
вектор внешнего момента, действующего
на ротор. Если внешний момент отсутствует
(![]() ),
то
),
то![]() ,
т.е. вектор
,
т.е. вектор![]() остается
неизменным в инерциальном пространстве
(сохраняет свое направление).
остается
неизменным в инерциальном пространстве
(сохраняет свое направление).
В
конструкции гироприбора обеспечиваются
минимально возможные моменты трения
на осях подвеса и принимаются меры по
начальной установке вектора
![]() в вертикальное положение. Теперь на
борту ЛА будет присутствовать опорное
вертикальное направление – направление
оси собственного вращения ротора.
Гироскоп устанавливается на борту ЛА
так, что ось наружной рамы подвеса
ориентирована по продольной оси ЛА.
в вертикальное положение. Теперь на
борту ЛА будет присутствовать опорное
вертикальное направление – направление
оси собственного вращения ротора.
Гироскоп устанавливается на борту ЛА
так, что ось наружной рамы подвеса
ориентирована по продольной оси ЛА.
При эволюциях ЛА основание гироприбора поворачивается в пространстве вместе с корпусом ЛА, а ось ротора остается стабилизированной в вертикальном направлении. С помощью датчика угла поворота установленного на основании и связанного с наружной рамой можно измерить угол крена, а с помощью датчика угла поворота установленного на наружной раме и связанного с внутренней рамой – угол тангажа.
В реальных гироприборах под действием остаточных моментов трения в опорах подвеса и других факторов ось ротора будет постепенно отклоняться от начального вертикального положения, и поэтому необходимы специальные средства для коррекции положения оси ротора.
В настоящее время именно гироскопические приборы позволяют измерять угловое положение объектов в авиационной, ракетной, космической и морской технике.