

12.2 Корреляционно-экстремальная система навигации
Новый способ определения путевой скорости с помощью автономной бортовой аппаратуры, не демаскирующий летательный аппарат в полете, использован в корреляционно-экстремальной системе навигации.
На борту летательного аппарата установлен объектив ОБ, который в фокальной плоскости строит изображение подстилающей поверхности, над которой движется летательный аппарат. В фокальной плоскости объектива в продольной плоскости летательного аппарата на определенном расстоянии друг от друга установлены два идентичных фотоприемника ФП1 и ФП2 (рис.121).
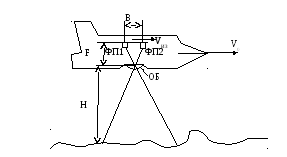
Рис.121
Схема корреляционно-экстремального измерителя скорости полета.
При движении летательного аппарата со скоростью V0 изображение подстилающей поверхности перемещается в фокальной плоскости объектива со скоростью VИЗ
![]() , (71)
, (71)
где F - фокусное расстояние объектива, H – высота полета.
Если измерить скорость движения изображения VИЗ, то, зная высоту полета Н, можно определить скорость полета.
Поскольку фотоприемники расположены в продольной плоскости летательного аппарата, изображение зарегистрированное фотоприемником ФП1 через некоторое время попадет на фотоприемник ФП2. Сигналы, формируемые фотоприемниками, является случайными функциями времени, но между собой эти сигналы сильно коррелированны. На рис.122а показано, что сигнал второго фотоприемника U2(t) близок по форме к сигналу первого фотоприемника U1(t), но сдвинут по времени на величину τ. Если измерить величину этого временного сдвига, можно найти скорость движения изображения
![]() , (72)
, (72)
где В – база прибора (расстояние между фотоприемниками).
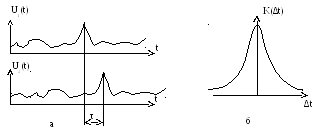
Рис.122.
Обработка сигналов корреляционно-экстремального измерителя скорости полета.
Для измерения неизвестного промежутка времени τ можно использовать свойство взаимно корреляционной функции /5/.
![]() (73)
(73)
На практике реализуется приближенное значение K(Δt), получаемое при конечном времени интегрирования Т. Вид взаимно корреляционной функции показан на рис.122б. Эта функция имеет экстремум при совпадении двух случайных функций, т.е при Δt =0.
Упрощенная схема вычисления корреляционной функции показана на рис.123. Поскольку интервал τ, на который смещен по времени сигнал U2(t) неизвестен, сигнал U1(t) искусственно смещается на время τх с помощью линии задержки ЛЗ. В соответствии со свойством корреляционной функции максимум K(Δt) будет достигнут при τх= τ. Поиск требуемого значения τх осуществляется с помощью экстремального регулятора ЭР.

Рис.123.
Схема вычисления корреляционной функции.
Построение экстремальных регуляторов – отдельный и достаточно сложный раздел теории автоматического управления. Один из простых вариантов экстремального регулятора использует свойство унимодальности корреляционной функции – наличие одного экстремума в точке, где τх=τ. Для определения этого единственного экстремума регулятор добавляет к текущему значению τх пробное гармоническое изменение Δτ = ΔτМ Sin(ωt). Если τх<τ, то в выходном сигнале интегратора K(Δt) появится гармоническая составляющая, которая совпадает по фазе с изменением Δτ (рис.124).

Рис.124.
Поиск экстремума корреляционной функции.
Если τх>τ, то в выходном сигнале интегратора K(Δt) появится гармоническая составляющая, которая находится в противофазе с изменением Δτ. В случае τх= τ в выходном сигнале интегратора K(Δt) исчезает гармоника частотой ω и появляется составляющая двойной частоты 2ω. Полученные соотношения гармоник в сигналах τх и K(Δt) легко детектируются с помощью электронных схем или алгоритмов, записанных в управляющий микроконтроллер, и используются для целенаправленного изменения τх.
Экстремальный регулятор непрерывно отслеживает изменение τ, что позволяет вычислять текущее значение путевой скорости летательного аппарата.
Рассмотренный метод измерения скорости может применяться и в других случаях, когда измерение должно происходить дистанционно, например, при измерении скорости движения раскаленного листа при прокатке. Близкий к этому метод использован в конструкции оптоэлектронного компьютерного манипулятора (мыши).
Основными достоинствами корреляционно-экстремального способа измерения скорости полета является полная скрытность работы (отсутствие демаскирующего излучения) и получение сигнала о путевой скорости без использования метеоинформации.
Недостатком метода является необходимость получения сигнала от земной поверхности случайно изменяющегося, но в достаточной степени стабильного за время τ. Поэтому аппаратура, использующая этот метод, не может устойчиво работать при полете над визуально абсолютно однородной поверхностью (например, заснеженной тундрой) или над быстро изменяющейся поверхностью (волны на поверхности акватории). При использовании фотоприемников работающих в видимой части спектра работу аппаратуры могут нарушить облака, если полет происходит выше облаков.