

10.6 Асинхронный тахогенератор
Асинхронный тахогенератор представляет собой электрическую машину, на статоре которой размещены две взаимно перпендикулярные обмотки, а ротор – полый немагнитный стакан из электропроводного материала, чаще всего из алюминия. (рис. 111) /1,с.265/.

Рис. 111.
Асинхронный тахогенератор.
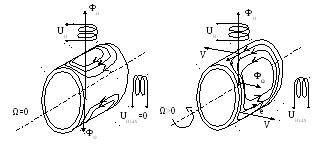
Одна из обмоток статора (обмотка возбуждения) подключается к источнику питания переменного тока частотой ω. Синусоидальный ток этой обмотки возбуждает в статоре пульсирующий магнитный поток, вектор которого совпадает с осью обмотки возбуждения и если ротор неподвижен, то в нем под действием магнитного потока наводятся только токи Фуко. Эти токи создают свое магнитное поле, совпадающее по направлению, но противоположные по знаку магнитному потоку обмотки возбуждения. Этот режим соответствует режиму короткого замыкания вторичной обмотки трансформатора и приводит к увеличению потребления тока от источника питания. Результирующий магнитный поток перпендикулярен оси второй (сигнальной) обмотки, поэтому ЭДС в ней не наводится и выходное напряжение тахогенератора равно нулю (рис.112а).
Если ротор тахогенератора вращается с некоторой угловой скоростью Ω, то в материале ротора наводится ЭДС
![]() , (61)
, (61)
где ВВ= ВВМSinωt – индукция поля возбуждения, lakt – длина ротора, V – окружная скорость ротора, r – радиус ротора, Ω – скорость вращения ротора (рис.071б).
Эта ЭДС вызовет в теле ротора токи, направление которых показано на рис.112б. Протекающие по ротору токи создают еще одно магнитное поле ФΩ, направление которого перпендикулярно вектору магнитного потока возбуждения. По направлению поле ФΩ совпадает с осью сигнальной обмотки. Поле ФΩ является пульсирующим с частотой ω, поэтому в сигнальной обмотке будет наводиться ЭДС, амплитуда которой будет пропорциональна скорости вращения Ω, а частота равняться частоте питающего напряжения ω:
![]() (62)
(62)
Поскольку частота выходного напряжения не зависит от частоты вращения, тахогенератор и называется асинхронным.
а б
Рис.112
Формирование выходного сигнала асинхронного тахогенератора.
Статическая характеристика асинхронного тахогенератора реверсивная, близкая к линейной. При изменении направления вращения ротора фаза выходного напряжения изменяется на 1800. Точность асинхронного тахогенератора уступает точности синхронных тахогенераторов, но простота конструкции и удобство сопряжения с цепями переменного тока обеспечили асинхронным тахогенераторам широкое применение в первую очередь в авиационной технике.
Тема 11. Измерение угловых скоростей летательного аппарата
При измерении угловых скоростей летательного аппарата возникает та же проблема, что и при измерении углового положения летательного аппарата – отсутствие системы координат, относительно которой измеряется скорость.
Если на летательном аппарате установлены гироскопические приборы для определения углового положения (см. Тема 9 «Определение углового положения летательных аппаратов»), можно определять угловые скорости путем дифференцирования сигналов этих приборов (см. Тема 10.1 «Дифференцирование сигнала по перемещению»), но точность получаемой информации будет ограничена.
Для более точного измерения угловых скоростей летательного аппарата используются специальные гироскопические приборы – датчики угловой скорости (ДУСы). Наиболее распространены ДУСы на основе двухстепенного гироскопа (рис.113), в которых используется физическое явление гироскопического момента – если вращающийся с высокой угловой скоростью ротор с кинетическим моментом Н участвует в вынужденном переносном угловом движении с угловой скоростью ω, возникает гироскопический момент
![]()
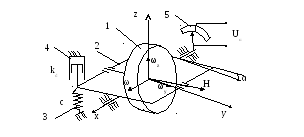
Рис.113
Схема гироскопического датчика угловой скорости.
Гироскопический датчик угловой скорости содержит ротор 1, рамку карданова подвеса 2, пружину 3, демпфер 4 и датчик угла поворота рамки 5. Ротор вращается с высокой угловой скоростью и обладает кинетическим моментом Н. Рамка связана с основанием через пружину с жесткостью с и демпфер с коэффициентом демпфирования кd.
Основание жестко связано с корпусом летательного аппарата и вращается в пространстве с угловыми скоростями ωx, ωy, ωz. Угловая скорость ωx при взаимодействии с кинетическим моментом Н порождает гироскопический момент, направленный по оси z. Этот момент парируется реакциями опор рамки подвеса и не вызывает движения рамки. Вектор угловой скорости ωy практически совпадает по направлению с вектором Н, поэтому вызванный гироскопический момент в первом приближении можно не учитывать.
Угловая скорость ωz при взаимодействии с кинетическим моментом Н порождает гироскопический момент, направленный по оси x и равный
![]() , (63)
, (63)
где α – угол поворота рамки от нейтрального положения.
Рамка имеет степень свободы поворота вокруг оси x и движение рамки описывается уравнением
![]() (64)
(64)
Здесь JX – момент инерции подвижной части (ротора и рамки) вокруг оси х, МВОЗМ – возмущающий момент, действующий на рамку, в основном момент трения.
Считая угол α<<1 (Cos α≈1), выражение (64) с учетом (63) можно записать в виде
![]() (65)
(65)
На основе выражения (65) получим передаточную функцию гироскопического датчика угловой скорости по каналу: входной сигнал - ωz, выходной сигнал - угол α
![]() , (66)
, (66)
где
![]() ,
,![]() ,
,![]() .
.
Следовательно,
ДУС представляет собой колебательное
звено, имеющее частоту собственных
колебаний
![]() .
Выбором величиныξ
можно изменять степень затухания
собственных колебаний датчика.
.
Выбором величиныξ
можно изменять степень затухания
собственных колебаний датчика.
Статическая характеристика ДУС без учета влияния МВОЗМ - реверсивная линейная.
![]()
Следует
отметить, что при появлении угла поворота
рамки
![]() появляется составляющая гироскопического
момента от компоненты
появляется составляющая гироскопического
момента от компоненты
![]() (рис.113), которая исказит результаты
измерения. Для уменьшения влияния этой
перекрестной связи при проектировании
ДУСов стремятся ограничить величину
углаα.
(рис.113), которая исказит результаты
измерения. Для уменьшения влияния этой
перекрестной связи при проектировании
ДУСов стремятся ограничить величину
углаα.
Поскольку рассмотренный ДУС способен измерять только одну компоненту угловой скорости, для измерения всех трех компонент ωx, ωy, ωz приходится применять блок из трех одинаковых ДУС, оси чувствительности которых ориентированы соответственно по осям x,y,z .
Располагая блоком из трех идентичных ДУСов можно снизить требования к малой величине угла поворота рамки. Если не вводить предположение о малости углов, то с трех ДУСов, которые ориентированы соответственно по осям x,y,z , получим три сигнала в виде трех углов поворота соответствующих рамок:
![]()
![]()
![]()
Рассматривая эту совокупность соотношений как систему линейных уравнений относительно неизвестных ωx, ωy, ωz по измеренным величинам углов α1, α2, α3.можно найти значения угловых скоростей без ограничения на величину угла отклонения рамки.
Для
примера –

Аналогично можно получить выражения для ωy, ωz.
Современные вычислительные средства (микроконтроллеры) позволяют легко реализовывать подобные вычисления. Снятие ограничений на величину угла поворота рамок ДУСов облегчает измерение этих углов.
Кроме гироскопических датчиков угловой скорости с быстро вращающимся ротором в последнее время стали применяться датчики, действие которых основано не на свойствах вращающегося тела, а на использовании колебательного движения тела.
Если тело на упругом стержне привести в колебательное движение в одной плоскости с постоянной амплитудой, то при неподвижном основании траектория движения тела будет плоской дугой (рис.114а). Скорость движения колеблющегося тела изменяется по гармоническому закону
![]()
где Vm – амплитуда изменения скорости, а Ω – частота колебаний.
Если основание, на котором закреплен стержень, вращается в пространстве с угловой скоростью ωz., то на тело, которое одновременно участвует в линейном относительном движении со скоростью V и вращательном переносном движении с угловой скоростью ωz.будет действовать Кориолисово ускорение
![]()

V
z z
Рис.114
Вибрационный датчик угловой скорости.
Поскольку скорость V знакопеременна, то и Кориолисово ускорение будет изменяться по направлению с частотой Ω. Под действием Кориолисовых сил колеблющееся тело будет описывать не плоскую траекторию, а пространственную эллипсоидальную траекторию (рис 114б). Величина поперечной оси эллипса 2yМАХ будет определяться угловой скоростью ωz. Измерив с помощью соответствующего датчика величину 2yМАХ можно определить угловую скорость ωz.
Основные достоинства устройства, называемого вибрационным гироскопом, состоят в простоте конструкции, малом потреблении энергии и возможности миниатюризации.
Рассмотренное устройство имеет большое количество недостатков, но современные технологии позволяют создавать приборы для измерения угловых скоростей применимые в случаях, когда высокая точность и стабильность измерений не требуется.