

3.1.3 Функциональные потенциометры.
В некоторых случаях потенциометрический датчик должен иметь не линейную статическую характеристику, а обеспечивать заданную функциональную зависимость между перемещением щетки и величиной выходного сигнала. Например, в некоторых системах управления летательными аппаратами требуется сигнал пропорциональный синусу или косинусу угла крена, тогда как рамка гироприбора поворачивается на угол равный углу крена. В этом случае может быть полезным потенциометрический датчик углового перемещения, щетка которого связана с рамкой гироприбора, а выходной сигнал имеет вид
U(a)=U0 sin(a).
Для обеспечения требуемой функциональной зависимости рассмотрим связь изменения выходного сигнала с распределением сопротивления обмотки по длине каркаса потенциометра (рис.36).
Пусть сопротивление обмотки распределено по длине каркаса по закону r(x) (Ом/м).
Рис.36
Распределение сопротивления потенциометра по длине каркаса.
В этом случае выходное напряжение в схеме однотактного (рис.28 а) потенциометра при RH=¥ имеет вид
![]() (18)
(18)
Отсюда
![]()
![]() ,
(19)
,
(19)
где R – полное сопротивление обмотки, U0 – напряжение питания датчика.
В частном случае для линейного датчика
![]() т.е.
т.е.
![]() и
и![]() ,
где (l
– диапазон перемещения щетки
потенциометра). Для получения линейной
статической характеристики
потенциометрического датчика сопротивление
обмотки должно быть равномерно
распределено по длине каркаса.
,
где (l
– диапазон перемещения щетки
потенциометра). Для получения линейной
статической характеристики
потенциометрического датчика сопротивление
обмотки должно быть равномерно
распределено по длине каркаса.
Реализация заданного распределения сопротивления обмотки по длине каркаса возможна несколькими способами:
- намотка с переменным шагом;
изменение сечения обмоточного провода на различных участках обмотки;
изменение длины витка за счет изменения профиля каркаса.
Наиболее часто применяется третий способ как самый технологичный. В этом случае каркас выполняют прямоугольного сечения постоянной толщины, а ширина каркаса определяется в соответствии с требуемой функциональной зависимостью.
Например,
для датчика с функциональной зависимостью
![]() распределение сопротивления по длине
каркаса принимает вид
распределение сопротивления по длине
каркаса принимает вид![]() ,
,
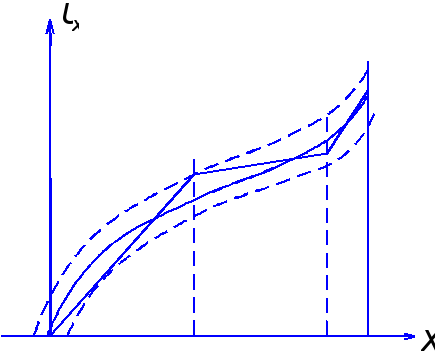
При выполнении намотки на профилированный каркас может возникнуть проблема сползания витков на участках каркаса с большим уклоном. Для устранения этой проблемы применяется другой способ профилирования каркаса. Поскольку воспроизведение требуемой функциональной зависимости возможно с некоторой ограниченной точностью, исходная функциональная зависимость заменяется кусочно-ломаной линией с допустимой погрешностью (рис.37а). В этом случае профиль каркаса состоит из участков постоянной ширины bi (рис.37 б), что упрощает процессы изготовления каркаса и намотки.
 а
а
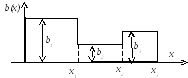 б
б
Рис. 37
Кусочно-линейная аппроксимация функциональной зависимости.
В настоящее время в связи с широким применением мощных вычислительных средств (микропроцессоров и микроконтроллеров) при построении датчиков интерес к функциональным потенциометрам снижается.
3.1.4 Динамические свойства потенциометрических датчиков
Поскольку входным сигналом потенциометрического датчика является механическое перемещение, а выходным – напряжение на нагрузке, динамические свойства зависят не только от самого датчика, но и от характера нагрузки. Для простоты рассмотрим случай, когда нагрузка носит чисто активный (омический) характер. Если принять, что обмотка потенциометра является чисто активной, то по каналу "входное перемещение – выходное напряжение" датчик является безынерционным звеном и имеет передаточную функциюW(p)=k.
При
более подробном рассмотрении динамических
свойств потенциометрического датчика
потребуется учет индуктивности обмотки,
межвитковой емкости и емкости монтажа,
что приведет к появлению запаздывания
выходного сигнала,![]() и динамические свойства датчика будут
описываться передаточной функцией
колебательного звена
и динамические свойства датчика будут
описываться передаточной функцией
колебательного звена
![]() .
.
Для
реальных конструкций потенциометрических
датчиков собственная частота колебаний
![]() выше десятков мегагерц, поэтому при
использовании датчика в системе, где
все процессы происходят в полосе не
выше сотен герц описание динамики
датчика безынерционным звеном вполне
допустимо.
выше десятков мегагерц, поэтому при
использовании датчика в системе, где
все процессы происходят в полосе не
выше сотен герц описание динамики
датчика безынерционным звеном вполне
допустимо.
Для устранения погрешности ступенчатости и уменьшения стоимости разрабатывались конструкции датчиков, в которых резистор изготавливался не намоткой провода на каркас, а напылением высокоомного материала на плоскую подложку (как в производстве электронных микросхем). Однако обеспечить высокую точность, стабильность от экземпляра к экземпляру и линейность статической характеристики таких потенциометрических датчиков оказалось затруднительно. Благодаря своей дешевизне такие переменные резисторы широко применяются в тех случаях когда высокая точность не требуется, например, в ручных регуляторах громкости в бытовой радиоаппаратуре.
Достоинства потенциометрических датчиков:
- простота и гибкость конструкции;
- простая технология изготовления;
- малый вес;
- большая величина и мощность выходного сигнала;
- возможность работы, как на постоянном, так и на переменном токе;
- достаточно высокая устойчивость к климатическим воздействиям (при соответствующем выборе материалов);
- устойчивость к воздействию проникающей радиации;
Недостатки потенциометрических датчиков:
- наличие подвижного контакта обуславливает снижение надежности и срока службы;
- необходимость принимать специальные конструктивные меры при работе датчика в условиях действия ударов, перегрузок и вибрации;
- невозможность измерения очень малых и больших перемещений;
В настоящее время разрабатываются конструкции бесконтактных потенциометрических датчиков на основе фоторезисторов с управлением путем перемещения светового пятна или на основе магниторезисторов, управляемых изменением магнитного поля путем перемещения постоянного магнита /13/.
Эти датчики имеют большой срок службы, но проигрывают классическим датчикам по устойчивости к внешним воздействиям.