

10.2 Центробежный датчик скорости вращения
Для создания датчика скорости необходимо использовать физический процесс, результат которого зависит от скорости движения. Одним из таких физических процессов является возникновение центробежной силы при вращении тела.
Величина центробежной силы определяется выражением
![]() , (54)
, (54)
где m – масса тела, ω – угловая скорость вращения, r – расстояние до оси вращения.
Датчик скорости вращения вала центробежного типа был использован Уаттом в системе управления скоростью вращения паровой машины (регулятор Уатта), обеспечившей устойчивую работу паровых машин. Схема регулятора Уатта показана на рис. 100.
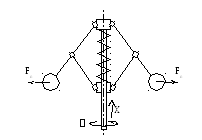
Рис. 100
Центробежный датчик скорости вращения регулятора Уатта.
В регуляторе Уатта центробежные силы, действующие на грузы через систему рычагов, уравновешиваются силой пружины. Поэтому каждому значению скорости вращения соответствует величина сжатия пружины и положение нижней шайбы регулятора. Статическая характеристика центробежного датчика скорости вращения показана на рис. 101.
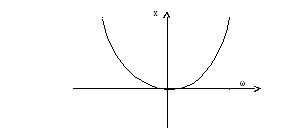
Рис. 101
Статическая характеристика центробежного датчика скорости вращения.
Поскольку величина центробежной силы пропорциональна квадрату угловой скорости вращения, статическая характеристика является нелинейной и однотактной.
Благодаря простоте конструкции и надежности центробежные датчики скорости вращения применяются достаточно широко, но только в тех случаях, когда направление вращения в процессе работы не изменяется.
К недостаткам рассмотренного варианта датчика следует отнести большое количество шарнирных соединений и получение результирующего сигнала (перемещение нижней шайбы) на подвижном элементе конструкции.
Разновидностью центробежного датчика скорости вращения является миниатюрный центробежный насос с манометром для измерения давления (рис. 102). При вращении ротора датчика жидкость увлекается лопастями ротора и участвует во вращательном движении. За счет центробежных сил на периферии ротора увеличивается давление в жидкости, которое регистрируется манометром.
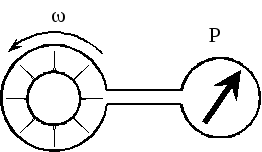
Рис. 102
Датчик скорости вращения с центробежным насосом.
Достоинством такого датчика можно считать отсутствие подвижных частей (кроме самого ротора насоса) и получение сигнала на неподвижной части датчика.
Общим недостатком датчиков с использованием центробежных сил является вид выходного сигнала – механический или гидравлический. В современных системах наибольшее распространение имеют электрические сигналы, поэтому потребуется соответствующее преобразование сигналов центробежных датчиков скорости.
10.3 Электромагнитные датчики скорости перемещения
В электромагнитных датчиках скорости перемещения используются физические эффекты, приводящие к изменению выходного напряжения или тока, что удобно для дальнейшего преобразования и использования.
Одним из таких физических эффектов является электромагнитная индукция. При изменении магнитного поля пронизывающего обмотку в ней наводится ЭДС
![]() ,
(55)
,
(55)
где Ф – магнитный поток через обмотку, w – число витков обмотки.
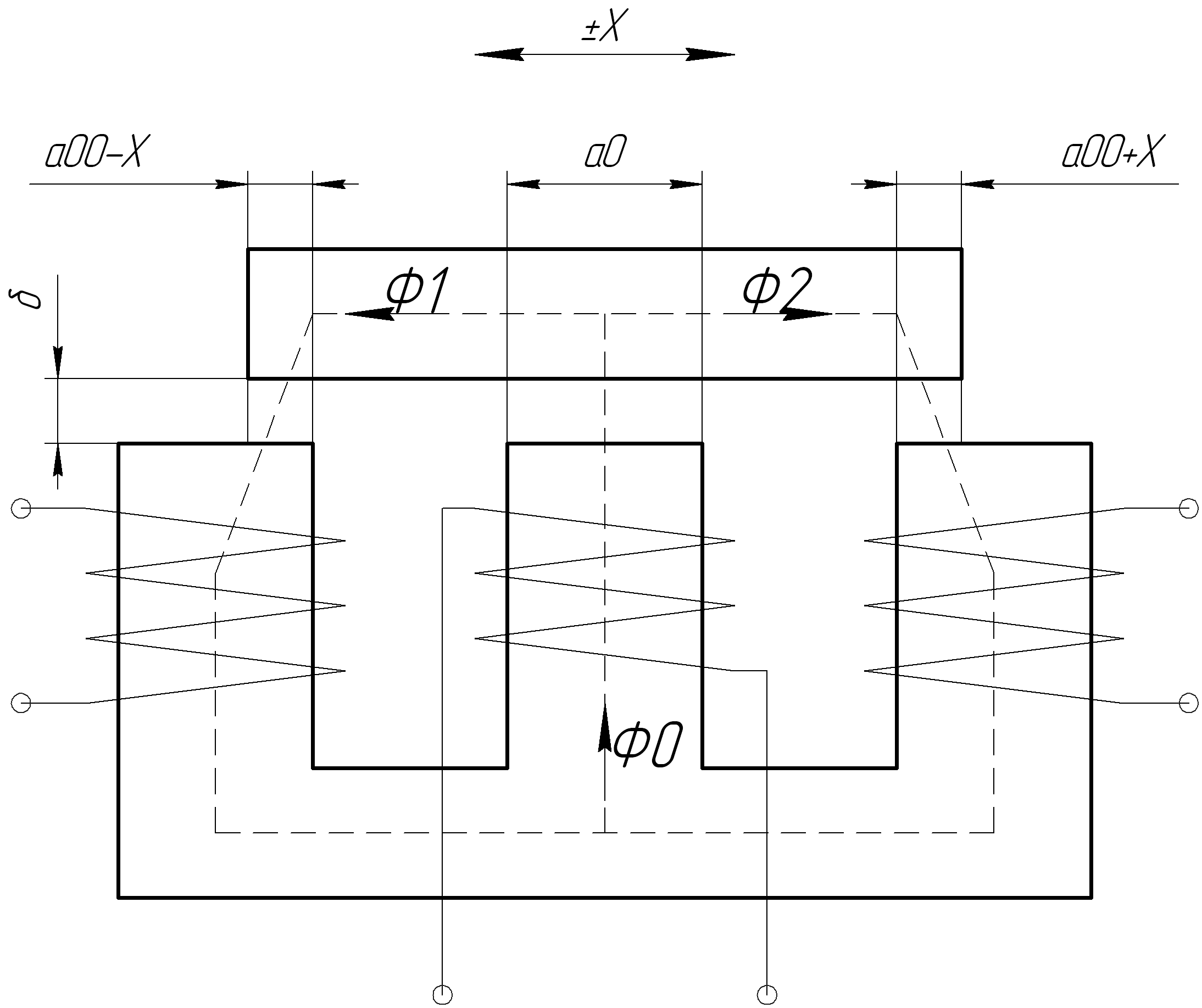
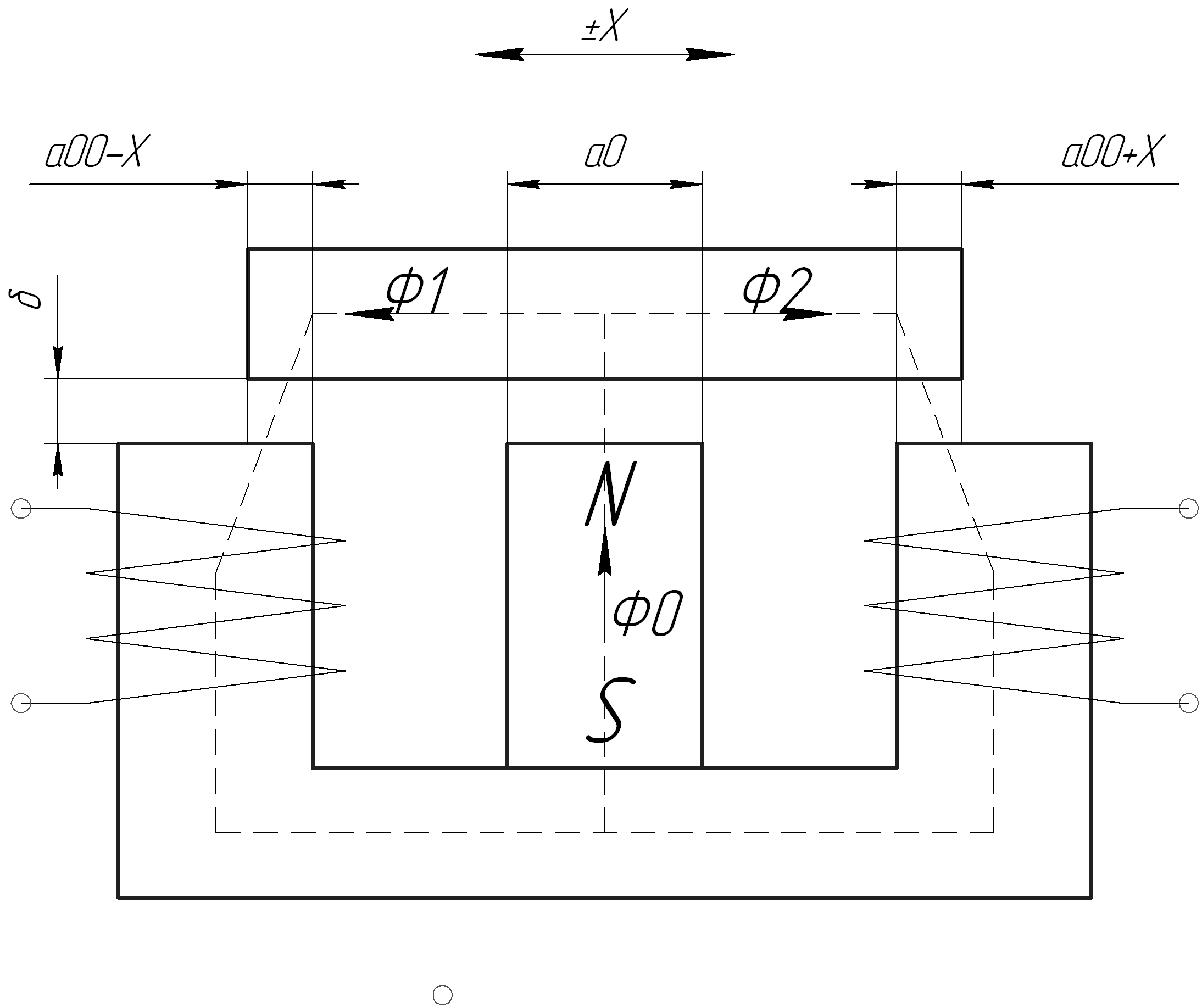
Изменение магнитного потока Ф через обмотку может быть вызвано перемещением деталей, составляющих магнитную цепь датчика. Пример такого датчика показан на рис.103а. Датчик состоит из трехстержневого сердечника, подвижного якоря и обмоток. По своему устройству рассматриваемый датчик подобен трансформаторному датчику перемещения, рассмотренному выше.
а б
Рис.103
Индукционный датчик скорости линейного перемещения.
Обмотка на среднем стержне подключена к источнику постоянного тока и создает намагничивающую силу М=J0w0. Эта намагничивающая сила возбуждает магнитный поток Ф0, разветвляющийся на потоки Ф1 и Ф2, протекающие через боковые стержни сердечника. Величины этих потоков и их зависимость от перемещения якоря определяются соотношениями (40). При неподвижном положении якоря потоки Ф1 и Ф2 остаются постоянными и ЭДС в обмотках w1 и w2 не возникает.
При
перемещении якоря происходит изменение
потоков Ф1
и Ф2
и в обмотках w1
и w2 генерируются
ЭДС пропорциональные скорости изменения
магнитных потоков
![]() и
и![]() ,
которые, в свою очередь, пропорциональны
скорости перемещения якоря
,
которые, в свою очередь, пропорциональны
скорости перемещения якоря![]() .
.
Выходной сигнал датчика формируется последовательным соединением обмоток w1 и w2.
Статическая характеристика рассмотренного датчика двухтактная (реверсивная).
С
точки зрения динамики процесс генерации
ЭДС на выходных обмотках можно считать
безынерционным, но при подключении
нагрузки и расчете токов следует
учитывать индуктивность обмоток. В
результате датчик совместно с цепями
приемника сигнала следует считать
инерционным звеном с постоянной времени
![]() ,
гдеL
– индуктивность обмотки, R
– эквивалентное активное сопротивление
обмотки и входной цепи приемника сигнала.
,
гдеL
– индуктивность обмотки, R
– эквивалентное активное сопротивление
обмотки и входной цепи приемника сигнала.
Поскольку магнитный поток возбуждается в магнитной цепи датчика постоянной намагничивающей силой обмотки возбуждения J0w0 , можно для возбуждения магнитного потока использовать постоянный магнит, размещенный в качестве среднего стрежня сердечника (рис.103б).
Другой способ использования явления электромагнитной индукции состоит в генерации ЭДС при перемещении проводника в магнитном поле. Если проводник, находящийся в постоянном равномерном магнитном поле с индукцией В, за время Δt перемещается на расстояние Δx перпендикулярно направлению проводника, то изменение магнитного потока, пересекающего проводник, составит
![]() ,
,
где lАКТ – активная длина проводника (часть проводника находящаяся в пределах магнитного поля). В соответствии с законом электромагнитной индукции в проводнике возникнет ЭДС равная
![]() (56)
(56)
Рассмотрим пример конструкции датчика скорости перемещения, использующего этот принцип, показанный на рис. 104.
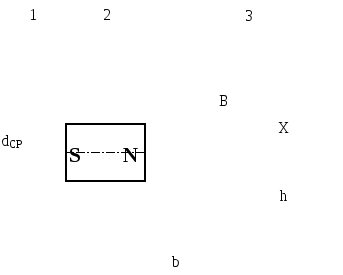
Рис.104.
Схема датчика скорости линейного перемещения.
Датчик содержит постоянный магнит 1, магнитопровод 2 и обмотку 3. Магнитопровод 2 образует кольцевой воздушный зазор, в котором размещена кольцеобразная обмотка, средний диаметр которой равен dСР, толщина h, длина b. Среднее значение индукции в кольцевом магнитном зазоре равно В.
При
перемещении обмотки вдоль оси со
скоростью
![]() в ней наводится ЭДС
в ней наводится ЭДС
![]() (57)
(57)
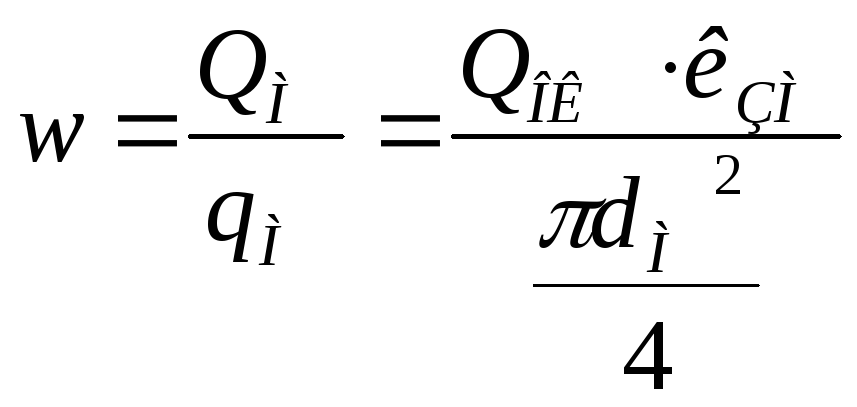
Число витков обмотки w определяется «окном» обмотки QОК= b h , диаметром обмоточного провода dМ и коэффициентом заполнения кЗМ (дается в справочниках), зависящим от диаметра провода, толщины изоляции и вида намотки.
Статическая характеристика двухтактная (реверсивная) и близка к линейной. Динамические свойства, как и у предыдущего датчика, зависят от индуктивности обмотки и сопротивления цепи и могут быть описаны передаточной функцией апериодического (инерционного) звена.
Рассмотренные электромагнитные датчики скорости перемещения могут измерять скорость только в ограниченном интервале перемещения объекта. Для измерения скорости при неограниченном перемещении необходимы другие датчики. Наиболее распространенное неограниченное перемещение – вращение. Датчики скорости вращения с неограниченным углом поворота объединяются общим названием – тахогенераторы.