

1.2 Статические свойства элементов
Статические свойства элементов описывают поведение элемента в установившемся режиме. Наиболее удобным для применения вариантом описания статических свойств является статическая характеристика – зависимость выходного сигнала от входного в установившемся режиме. Статическая характеристика может быть представлена в графической, аналитической или табличной форме. Наиболее часто используется графическая форма, как наиболее наглядная и информативная.
По статической характеристике определяются следующие важные свойства элемента, отражающие особенности его работы и пригодность для решения конкретных задач при построении САУ:
- реверсивность,
- линейность,
- однозначность.
Реверсивные (двухтактные) элементы при изменении знака входного сигнала X изменяют знак выходного сигнала Y.
Термин «двухтактные» элементы пришел из электроники, где отображал способность электронной схемы реагировать на сигналы разных полярностей. Термин «реверсивные» более распространен в технике автоматического управления, где он обозначает возможность правильно реагировать на управляющий сигнал. Например «реверсивный электропривод» может поворачивать выходной вал в обоих направлениях – по часовой стрелке и против в зависимости от управляющего сигнала.
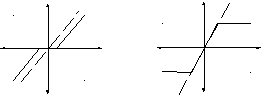
На рис.4 приведены примеры нереверсивных (однотактных) (4б,.4г, 4е) и реверсивных (двухтактных) (4а, 4в, 4д) статических характеристик.

Рис.4
Примеры нереверсивных и реверсивных статических характеристик
Линейной статической характеристикой обладает элемент, для которого зависимость выходного сигнала от входного описывается формулой
Y = k*X + Y0
Наиболее удобны в применении характеристики, для которых Y0 =0 и характеристика проходит через начало координат.
У реальных элементов линейных статических характеристик не существует, поэтому может возникнуть проблема аппроксимации реальной, т.е. нелинейной статической характеристики, наиболее «подходящей» линейной зависимостью.
Вопрос о том, что считать «подходящей» зависимостью существенно зависит от решаемой задачи.
Для замены реальной нелинейной статической характеристики искусственной линейной характеристикой применяется процедура линеаризации.
Один из основных приемов линеаризации статической характеристики состоит в разложении нелинейной зависимости в ряд Тейлора и отбрасывании членов ряда второго и выше порядков малости. Если нелинейная статическая характеристика описывается выражением
Y = f(X),
то, выбрав точку «номинального режима» Xn, найдем Yn = f(Xn) и проведем разложение нелинейной функции f(X) в ряд Тейлора в малой окрестности около точки номинального режима
![]() …
…
Учитывая, что Y-Yn=ΔY и отбрасывая члены ряда порядка выше первого, получим
ΔY=k ΔX,
где
k=![]() в точке номинального режима.
в точке номинального режима.
В новой системе координат ΔX, ΔY, т.е. в области малых отклонений от номинального режима статическая характеристика – линейная.
Если статическая характеристика задана в графической форме, процедура линеаризации по Тейлору состоит в проведении касательной к графику статической характеристики в выбранной точке номинального режима и переносе системы координат в точку номинального режима на характеристике, как показано на рис.5.

Рис.5
Линеаризация статической характеристики
Другой прием линеаризации заключается в выборе линейной аппроксимации исходной нелинейной статической характеристики по методу минимума СКО (средне–квадратической ошибки). На рис.6 показан этот прием линеаризации.

Рис.6
Линеаризации нелинейной статической характеристики по методу минимума СКО
Проводится прямая линия с углом наклона, величину которого следует найти. Определяются отклонения исходной характеристики Y =f(X) от искомой линейной зависимости
dY=f(X) – k X
и записывается функционал в виде интеграла от квадратов отклонений δY
Funk(k)
=
![]() dY2
dX.
dY2
dX.
Отыскивается значение k, при котором функционал достигает минимума. Полученная таким образом величина k и принимается за коэффициент пропорциональности в искомой линейной зависимости
Y=k X
Иногда применяется очень простой и грубый прием линеаризации нелинейной статической характеристики, допустимый лишь при самых предварительных исследованиях системы. Прием состоит в «отбрасывании» нелинейной составляющей статической характеристики.
а) б)
Рис.7
Линеаризация статических характеристик
На рис.7а показано применение этого приема к статической характеристике одной из типовых нелинейностей – «зона нечувствительности». На предварительной стадии исследований принимается линейная статическая характеристика, показанная пунктирной линией, т.е. зона нечувствительности просто исключается из рассмотрения. Другой пример показан на рис.7б, где пунктиром показана «аппроксимация» другой типовой нелинейности – характеристики с насыщением. Естественно, полученные при такой линеаризации результаты исследования поведения системы требуют в дальнейшем уточнения, например путем математического моделирования, с учетом реальных нелинейностей или экспериментальной отработки на макетах.
Выбор метода линеаризации определяется содержанием всего объема исследований проектируемой системы. Если есть основания полагать, что отклонения от линейности статической характеристики вызваны ошибками измерений или влиянием шумов, то рационально применять линеаризацию по минимуму СКО.
Если линеаризация проводится для того, чтобы исследовать динамику всей проектируемой системы в рамках линейной теории автоматического управления, то линеаризацию следует выполнять только по методу разложения в ряд Тейлора. Только в этом случае результаты, полученные с помощью линейной теории можно распространить на свойства исходной нелинейной системы, применяя известные теоремы Ляпунова об устойчивости и неустойчивости систем по линейному приближению.
Существуют нелинейные статические характеристики, которые не могут быть линеаризованы ни одним из рассмотренных приемов. Такие нелинейные статические характеристики относятся к нелинеаризуемым статическим характеристикам. Такими характеристиками являются, в частности, разрывные (релейные) характеристики (см. рис. 4е).
Однозначность статической характеристики - каждому значению входного сигнала X соответствует одно значение выходного сигнала Y. Примером неоднозначной статической характеристики служит характеристика, в которой присутствует петля гистерезиса (рис. 4д). Влияние неоднозначности статической характеристики на динамику системы требует специальных методов исследований, которые изучаются в нелинейной теории автоматического управления.
В некоторых случаях бывает полезно иметь краткое, из одной – двух цифр описание статических свойств элемента, пусть достаточно грубое и приближенное. Для линейной статической характеристики эта проблема решается автоматически, т.к. линейная статическая характеристика описывается всего одним числом, которое называется коэффициентом передачи, чувствительностью, крутизной или коэффициентом усиления.
В случае нелинейной статической характеристики вводят понятия статического и дифференциального коэффициентов передачи, чтобы кратко, но несколько полнее описать статические свойства элемента. Для выбранной точки на статической характеристике величина статического коэффициента передачи определяется как отношение выходного сигнала Y к входному сигналу X:
KСТ=Y/X
В качестве дифференциального коэффициента передачи принимается величина производной в выбранной точке характеристики.
KДИФ= dY/dX
На рис.8 показано графическое представление статического и дифференциального коэффициентов передачи для нелинейной статической характеристики.
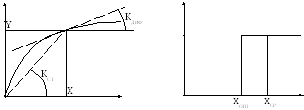
Рис.8 Рис.9
Статический и дифференциальный Релейная статическая характеристика
коэффициент передачи
Для релейных статических характеристик в качестве кратких числовых описаний используются значения величины входного сигнала, при котором происходит переключение выходного сигнала – XСР и XОТП, показанные на рис.9.