

Тема 14. Измерение угловых ускорений
Для измерения углового ускорения вала в механизме применяют датчики, которые во вращательном варианте повторяют идею простого осевого акселерометра (рис.131). На валу 1, ускорение которого требуется измерить, соосно устанавливается свободно перемещающийся массивный диск 2 (инерционная масса). Этот диск связан с валом через пружину 3 и не показанный на рисунке демпфер. Угол α – угол поворота диска относительно вала. Датчик угла поворота на рисунке не показан.
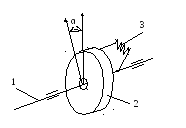
Рис.131.
Схема датчика угловых ускорений.
Уравнение движения диска относительно вала имеет вид аналогичный (75)
![]() (81)
(81)
В этом уравнении α – угол поворота диска относительно вала,
J0 – момент инерции диска,
kd – коэффициент демпфирования,
с – жесткость пружины,
ω – скорость вращения вала.
По аналогии с (76) легко установить, что датчик представляет собой колебательное звено и рассчитать его динамические свойства.
Существенная проблема при создании датчика углового ускорения вала состоит в том, что датчик поворота диска должен размещаться на вращающемся валу, а результат измерения должен быть передан в аппаратуру, установленную на основании механизма.
Иначе решается задача измерения углового ускорения перемещения в пространстве летательного аппарата. Для измерения углового ускорения вокруг оси х на летательном аппарате устанавливают два идентичных датчика линейных ускорений симметрично относительно центра масс летательного аппарата на расстоянии В (рис.132). Оси чувствительности акселерометров направлены перпендикулярно плоскости xOz.
Сигналы акселерометров будут определяться влиянием гравитационного ускорения, линейного ускорения в направлении оси y и угловым ускорением аппарата вокруг оси х.
![]() (82)
(82)
![]()

Рис.132.
Измерение углового ускорения ЛА с помощью датчиков линейных ускорений.
Разность сигналов U1 и U2 содержит информацию только об угловом ускорении аппарата
![]()
![]()
Для получения полной информации обо всех трех компонентах вектора углового ускорения аппарата потребуется шесть попарно работающих акселерометров.
Тема 15. Датчики усилия
Измерение усилий является необходимым для построения многих систем управления, в которых усилие (или вес) выступает регулируемым параметром, а также для контроля нагрузки на элементы конструкции при прочностных испытаниях и в условиях нормальной эксплуатации.
Одним из простых способов измерения усилий является применение упругого тела, которое под действием измеряемого усилия деформируется и по величине деформации можно определить величину усилия.
Связь деформации с действующей нагрузкой описывается законом Гука. В случае растяжения стержня эта связь имеет вид
![]() , (83)
, (83)
где
Δl
– абсолютное удлинение,
l0
– начальная
длина,
![]() - механическое напряжение в материале
стержня (F
– усилие растяжения, S
– площадь сечения стержня), Е
– модуль упругости материала стержня
(дается в справочниках по сопротивлению
материалов).
- механическое напряжение в материале
стержня (F
– усилие растяжения, S
– площадь сечения стержня), Е
– модуль упругости материала стержня
(дается в справочниках по сопротивлению
материалов).
Задача измерения усилия может быть сведена, таким образом, к измерению деформации стержня (перемещению) с помощью подходящего датчика перемещения. Использование деформации растяжения стержня связано с определенными техническими трудностями, т.к. относительная (следовательно, и абсолютная) величина деформации мала (≈10-3 – 10-5).
Необходимо отметить, что закон Гука имеет ограниченную область применимости – область упругой деформации. Для многих материалов с увеличением напряжения деформация из упругой переходит в пластическую, для которой закон Гука неприменим и при снятии напряжений у стержня будет присутствовать остаточная деформация.
Более благоприятное соотношение деформации и усилия дает использование деформации изгиба или кручения. При использовании обычной винтовой пружины растяжения величина деформации может быть соизмерима с исходной длиной ненагруженной пружины (рис.133), что облегчает измерение усилия. Формулы для расчета балок на изгиб и винтовых пружин на растяжение приводятся в справочниках по сопротивлению материалов и в справочниках конструктора.
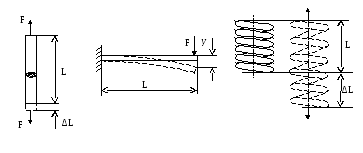
Рис. 133
Деформация упругих элементов.
Использование упругой деформации для измерения усилия позволяет создавать очень простые датчики, и поэтому находят широкое применение (разнообразные пружинные динамометры). При необходимости в конструкцию динамометров включают рычажные и другие механизмы для увеличения перемещения отсчетного устройства (стрелки динамометра).Недостатком рассмотренного принципа построения датчиков усилия является получение первичного эффекта в виде перемещения, что требует введения в конструкцию дополнительно датчика перемещения для получения сигнала в электрической форме.
В системах автоматического управления более удобны датчики с электрическим выходным сигналом, поэтому рассмотрим физические эффекты, в которых приложенное усилие вызывает непосредственно влияние на электрические или электромагнитные процессы.