

4.4 Индукционные рамочные датчики перемещений
Если величина обратного воздействия в проектируемом датчике должна быть минимальной, эффективными могут оказаться индукционные рамочные датчики перемещений. Простейшая схема рамочного датчика показана на рис.54а.

а б
в
Рис. 54.
Индукционный рамочный датчик с одной сигнальной обмоткой.
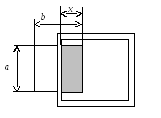
Принцип действия рамочного датчика основан на том, что в рабочем воздушном зазоре, в котором возбуждено переменное магнитное поле, перемещается вторичная обмотка в виде рамки. Величина ЭДС, наводимая в рамке, определяется потоком, проникающим в эту рамку:
![]() , (44)
, (44)
где В=В(t)=ВmSin(ωt), W – число витков обмотки, S – часть площади рамки, пронизываемая магнитным потоком. На рис.54б видно, что при перемещении рамки в направлении ±х величина площади магнитного потока, захватываемая рамкой
![]()
В
рамке наводится ЭДС
![]() ,
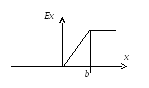
амплитуда которой зависит от перемещениях.
,
амплитуда которой зависит от перемещениях.
Поскольку фаза наводящейся в обмотке ЭДС остается неизменной при перемещениях рамки статическая характеристика рассмотренного варианта датчика (рис.54в) является однотактной (нереверсивной).
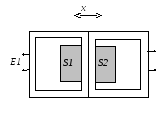
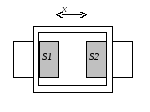
Обеспечение двухтактности (реверсивности) статической характеристики возможно двумя способами. Первый способ заключается в размещении в одном рабочем воздушном зазоре двух жестко связанных между собой рамок (рис.55а). В нейтральном положении подвижной системы площадь рамок, пронизываемая магнитным потоком S1 и S2, одинакова. При смещении рамок в направлении ±х величина магнитного потока через рамки дифференциально изменяется, что приводит к изменению наводимых в них ЭДС Е1 и Е2. Поскольку фазы ЭДС в обоих обмотках совпадают, для получения двухтактной статической характеристики входной сигнал датчика формируется как разность генерируемых в обмотках ЭДС (рис.55б).
Е2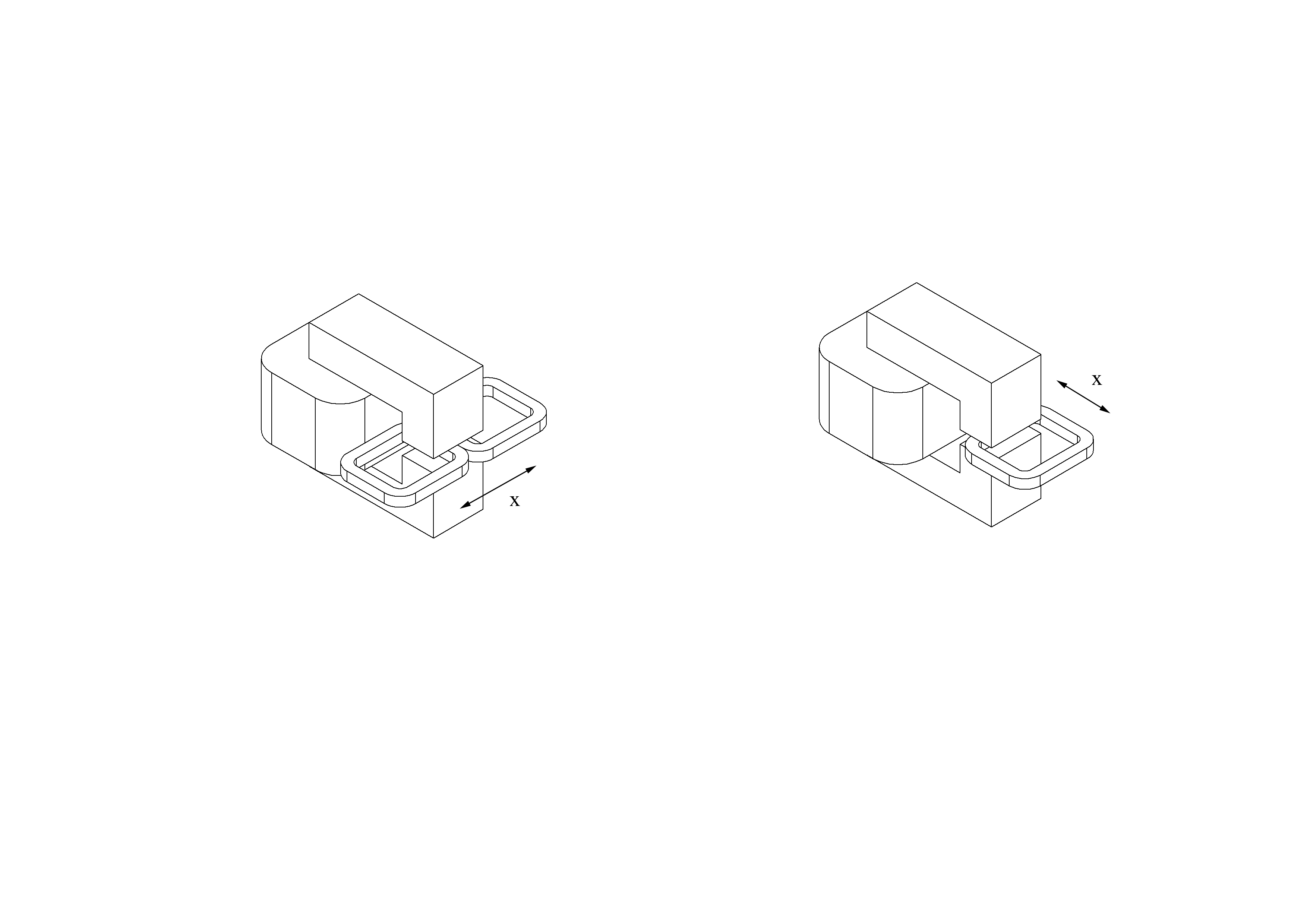
а б
Рис.55
Индукционный рамочный датчик с двумя сигнальными обмотками.
По второму способу магнитопровод имеет два рабочих воздушных зазора, в которых располагается одна обмотка в виде рамки (рис.56а). В нейтральном положении величины магнитных потоков, проходящих через рамку в левом и правом воздушных зазорах одинаковы. Следовательно, одинаковы будут амплитуды наводимых в рамке ЭДС от правого и левого потока. Поскольку потоки, проходящие через рамку в левом и правом воздушных зазорах, всегда направлены встречно, две ЭДС в рамке будут генерироваться в противофазе (со сдвигом фаз равном 1800) (рис.56б). При смещении рамки одна из ЭДС будет преобладать по величине, что обеспечивает формирование двухтактной статической характеристики.
а б
Рис. 56.
Двухтактный индукционный рамочный датчик с одной сигнальной обмоткой.
При расчете конструктивных параметров датчика необходимо учитывать, что для свободного перемещения рамки между рамкой и поверхностями магнитопровода образующими рабочий воздушный необходимо предусматривать технологический зазор не менее 0,1 – 0,2 мм с каждой стороны. Это увеличивает воздушный зазор и требует более мощного возбуждения для создания магнитного поля.
Основное достоинство рамочных датчиков – возможность обеспечить малую величину обратного воздействия датчика. Сила обратного воздействия определяется величиной тока в сигнальной обмотке (в рамке) и если использовать в качестве приемника сигнала устройство с большим входным сопротивлением, можно существенно уменьшить ток сигнальной обмотки и, соответственно, силу обратного воздействия.
К недостаткам рамочных датчиков следует отнести наличие электрических цепей на подвижной части датчика, что усложняет его применение и может приводить к снижению надежности.