

Векторная алгебра и аналитическая геометрия
.pdfФедеральное агентство по образованию Уральский государственный технический университет - УПИ
имени первого Президента России Б.Н. Ельцина
Кафедра высшей математики
МАТЕМАТИКА
2. ВЕКТОРНАЯ АЛГЕБРА И АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Курс высшей математики для бакалавров
Екатеринбург
УрФУ
2013
Министерство образования и науки Российской Федерации Уральский федеральный университет
имени первого Президента России Б.Н. Ельцина
Кафедра высшей математики
МАТЕМАТИКА
Часть 2. ВЕКТОРНАЯ АЛГЕБРА И АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Научный редактор – доц., канд. физ.-мат. наук Л.П. Мохрачева
Рекомендовано Уральским отделением Учебно-методического объединения вузов РФ в области строительного образования в качестве учебного пособия для студентов специальностей направления 6533500
«Строительство» всех форм обучения
Екатеринбург
УрФУ
2013
УДК 512.643(075.8) ББК 22.143 я 73, М 33
Рецензенты:
кафедра физики Уральского государственного лесотехнического университета; доктор физ.-мат. наук, проф. А.П. Танкеев, зав. лабораторией ИФМ УрО РАН
Авторы: Соболев А.Б., Вигура М.А., Рыбалко А.Ф., Рыбалко Н.М., Л.Ю.Трояновская Л.Ю., Кассандров И.Н.
М 33 МАТЕМАТИКА. Часть 2. Векторная алгебра и аналитическая геометрия: учебное пособие / Соболев А.Б., Вигура М.А., Рыбалко А.Ф., Рыбалко Н.М., Л.Ю.Трояновская Л.Ю., Кассандров И.Н.
Екатеринбург: УрФУ, 2013. 174 с.
ISBN 978-5-321-01784-5
Данное пособие представляет собой вторую часть базового курса высшей математики и предназначено для бакалавров, программа обучения которых предусматривает равные количества аудиторных часов и часов для самостоятельной работы студентов.
Содержание пособия охватывает следующие разделы программы: векторная алгебра, аналитическая геометрия в пространстве, на плоскости, кривые второго порядка, поверхности.
Пособие включает теоретические сведения, примеры решения задач, тексты домашних заданий, титул и варианты индивидуальной расчетной работы, образец контрольной работы и справочный материал по теме.
Подготовлено кафедрой высшей математики
УДК 512.643(075.8) ББК 22.143 я 73
ISBN 978-5-321-01784-5
© УрФУ, 2013
|
ОГЛАВЛЕНИЕ |
|
1. |
ВЕКТОРНАЯ АЛГЕБРА...................................................................................... |
4 |
|
1.1. Определение вектора..................................................................................... |
4 |
|
1.2. Линейные операции над векторами и их свойства...................................... |
4 |
|
1.3. Базис и координаты....................................................................................... |
6 |
|
1.4. Скалярное произведение векторов............................................................... |
8 |
|
1.5. Векторное произведение векторов ............................................................. |
10 |
|
1.6. Смешанное произведение векторов ........................................................... |
12 |
2. |
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ В ПРОСТРАНСТВЕ ............................... |
14 |
|
2.1. Уравнения поверхностей и линий .............................................................. |
14 |
|
2.2. Плоскость в пространстве........................................................................... |
15 |
|
2.3. Прямая линия в пространстве..................................................................... |
20 |
|
2.4. Прямая и плоскость..................................................................................... |
23 |
3. |
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ НА ПЛОСКОСТИ................................... |
26 |
|
3.1. Простейшие задачи на плоскости............................................................... |
26 |
|
3.2. Прямая линия на плоскости........................................................................ |
26 |
|
3.3. Кривые второго порядка ............................................................................. |
29 |
|
3.4. Преобразования координат......................................................................... |
34 |
|
3.5. Линии в полярной системе координат ....................................................... |
39 |
|
3.6. Параметрическое задание линий................................................................ |
43 |
4. |
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА.......................................................... |
43 |
5. |
ПРАКТИЧЕСКИЕ ЗАНЯТИЯ ........................................................................... |
50 |
6. |
ДОМАШНИЕ ЗАДАНИЯ................................................................................ |
105 |
|
ДЗ № 1. Векторная алгебра.............................................................................. |
105 |
|
ДЗ № 2. Прямая и плоскость ........................................................................... |
109 |
|
ДЗ № 3. Прямая на плоскости ......................................................................... |
111 |
|
ДЗ № 4. Кривые на плоскости ......................................................................... |
113 |
|
ДЗ № 5. Поверхности в пространстве ............................................................. |
119 |
7. |
РАСЧЕТНАЯ РАБОТА ................................................................................... |
122 |
8. |
ПРИМЕР ВАРИАНТОВ КОНТРОЛЬНЫХ РАБОТ....................................... |
148 |
9. |
ОСНОВНЫЕ ПОНЯТИЯ И ФОРМУЛЫ........................................................ |
149 |
10. БИБЛИОГРАФИЧЕСКИЙ СПИСОК ........................................................... |
173 |
|
3
I.ВЕКТОРНАЯ АЛГЕБРА
1.1.Определение вектора
Понятие вектора возникло как математическая абстракция объектов, характеризующихся не только скалярной величиной, но и направлением, например: перемещение, скорость, напряженность электрических и магнитных полей.
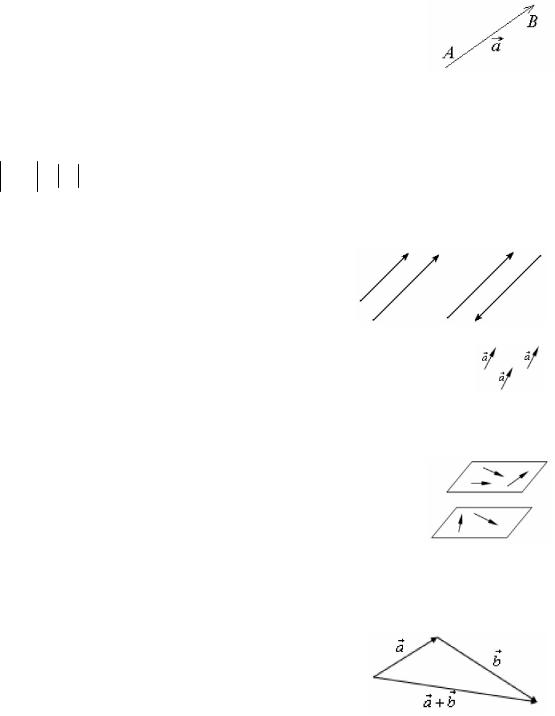
Вектором называется направленный отрезок прямой, у которого один конец (точка A) называется началом вектора, а другой конец (точка B ) – концом вектора.
Вектор обычно обозначается либо двумя прописными буквами AB , либо одной строчной буквой a .
Вектор, начало и конец которого совпадают, называется нулевым вектором: 0 . Нулевому вектору можно приписать любое направление.
Вектор характеризуется модулем (или длиной), который равен длине от-
резка AB : AB a .
Вектор BA a называется противоположным ненулевому вектору
AB a .
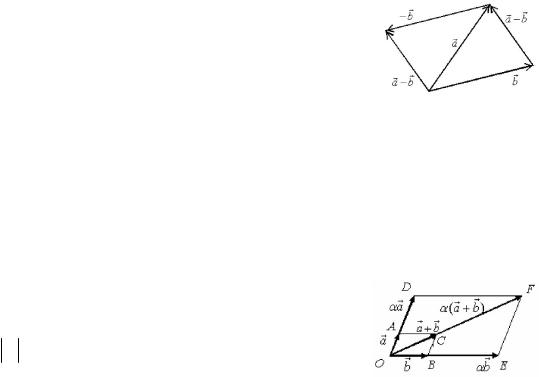
Векторы называются коллинеарными, если они лежат на одной прямой или на параллельных прямых.
Два вектора называются равными, если они коллинеарны, имеют одинаковую длину и направление.
Точка приложения вектора может быть выбрана произвольно, векторы иногда называют свободными.
Векторы называются компланарными, если они лежат в одной плоскости или в параллельных плоскостях.
1.2. Линейные операции над векторами и их свойства
Линейными операциями над векторами называются сложение векторов и умножение вектора на вещественное число.
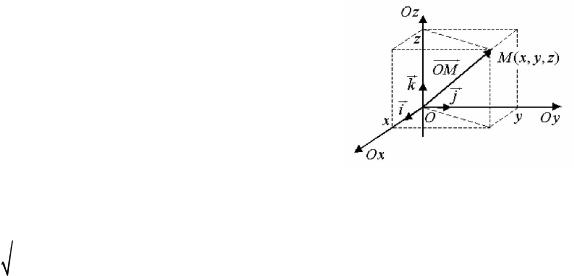
Суммой a b двух векторов a и b называется вектор, проведенный из начала вектора a в конец вектора b при условии, что вектор b приложен к концу вектора a .
4
Правило сложения векторов, изложенное в этом определении, обычно на-
зывают правилом треугольника.
|
называется вектор |
|
|
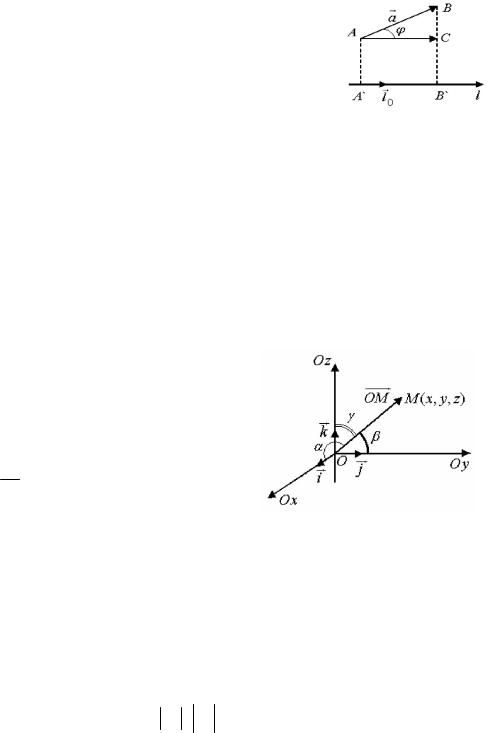
Разностью a b |
x , такой, что x |
b a . |
Операция сложения векторов обладает свойствами:
1)a b b a ;
2)a b c a b c ;
3)a 0 a ;
4)a a 0.
|
|
|
|
|
Произведением a вектора a на вещественное число |
|
|||
0, |
|
|
|||||||
a 0 называется вектор, коллинеарный вектору a , имеющий длину |
|||||||||
|
|
|
|
|
a |
|
|
и имеющий направление, совпадающее с направлением вектора |
a в |
|
|
|
|
||||||
случае 0 и противоположное направлению вектора a в случае 0. Если
a 0, то a 0 .
Геометрический смысл операции умножения вектора на число:
при умножении вектора a на число вектор a "растя-
гивается" в раз.
Операция умножения вектора на число обладает свойствами:
1)a a ;
2)+ a a a ;
3)a b a b ;
4)1 a a .
Линейная зависимость векторов
Линейной комбинацией векторов a1, |
a2 , ..., an называют выражение: |
||||
|
|
|
n |
|
, |
1a1 |
2a2 |
... nan |
iai |
||
|
|
|
i 1 |
|
|
где 1 , 2 , ..., n - произвольные действительные числа. |
|
||||
Система векторов a1 , a2 , ..., |
an называется линейно зависимой, если суще- |
||||
ствуют действительные числа 1 , 2 , ..., n , такие, что хотя бы одно из них отлично от нуля, и выполняется равенство:
|
|
|
0 . |
(*) |
1a1 |
2a2 |
... nan |
В противном случае, т.е. если линейная комбинация (*) обращается в ноль только при всех i 0, i 1, ..., n , то система векторов называется линейно независимой.
5

Если векторы линейно зависимы, то любой вектор может быть выражен в виде линейной комбинации остальных.
Геометрические критерии линейной зависимости
Система двух ненулевых векторов a1 , a2 линейно зависима тогда, и только тогда, когда векторы коллинеарны.
Система трех ненулевых векторов a1, a2 , a3 линейно зависима тогда и только тогда, когда векторы компланарны.
1.3. Базис и координаты
Базисом B на прямой будем называть любой ненулевой вектор этой прямой. Если a – произвольный вектор какой-либо прямой, то любой вектор на
этой прямой b может быть записан в виде b a .
Базисом B на плоскости будем называть два неколлинеарных вектора на этой плоскости, взятые в определенном порядке. Если a и b – произвольные неколлинеарные векторы на плоскости, то любой вектор на этой плоскости
ńможет быть записан в виде ń a b , .
Базисом B в пространстве будем называть три некомпланарных вектора, взятые в определенном порядке.
Каждый вектор пространства может быть разложен по базису в пространстве.
Если a , b , с – три некомпланарных вектора в пространстве, то любой вектор d может быть за-
|
|
писан в виде d a b c , , . |
|
Геометрически вектор |
d представляет собой |
пространственную диагональ параллелепипеда, построенного на векторах a , b и с .
Числа , , называются координатами вектора в соответствующем базисе.
Разложение вектора по базису единственно.
Базис, состоящий из единичных взаимно перпендикулярных векторов (ортов), называется ортонормированным (ОНБ).
Два вектора равны тогда и только тогда, когда равны их соответствующие координаты в одном и том же базисе. Линейные операции над векторами сводятся к линейным операциям над их координатами.
6
Рассмотрим векторы a a1 , a2 , a2 и b b1 ,b2 ,b3 , заданные своими ко-
ординатами в произвольном базисе B e1,e2 ,e3 . Для них справедливы следую-
щие утверждения:
1) |
|
тогда и только тогда, когда a1 b1 , |
a2 b2 , |
a3 b3 (равные |
a b |
вектора имеют равные координаты),
2)a a1 , a2 , a3 (при умножении вектора на число все координаты умножаются на это число),
3) a b a1 b1 , a2 b2 , a3 b3 (при сложении векторов соответствую-
щие координаты складываются).
4) векторы a a1 , a2 , a3 и b b1 ,b2 ,b3 коллинеарны (при b 0 ), если
a b и их соответствующие координаты пропорциональны:
|
|
|
|
a |
b , a |
b , a b |
или |
a1 |
|
a2 |
|
a3 |
. |
|||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 |
1 |
2 |
|
2 |
3 |
|
3 |
|
b1 |
b2 |
|
b3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Декартова прямоугольная система координат |
||||||||||||||
|
Декартова система координат в пространстве определяется заданием |
|||||||||||||||||
точки О – начала координат и базисных векторов i , j , k |
(трех взаимно перпен- |
|||||||||||||||||
дикулярных векторов единичной длины). |
|
|
|
|
|
|
|
|
||||||||||
|
Вектор OM , идущий из начала координат в |
|
|
|
|
|
|
|||||||||||
точку M , называется радиус-вектором точки M . |
|
|
|
|
|
|
||||||||||||
|
Координаты радиус-вектора OM x, y,z и |
|
|
|
|
|
|
|||||||||||
координаты точки M x, y,z |
совпадают. |
|
|
|
|
|
|
|
|
|||||||||
|
Если |
известны координаты |
точек |
|
начала |
|
|
|
|
|
|
|||||||
A (ax ,ay ,az ) |
и конца |
B (bx ,by ,bz ) вектора, |
то коор- |
|
|
|
|
|
|
|||||||||
динаты вектора AB bx |
ax ,by ay ,bz az . |
|
|
|
|
|
|
|||||||||||
|
Расстояние между точками А и В в пространстве равняется длине векто- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bx ax 2 |
by ay |
2 |
|
|
|
|
|
|
|
|
|
|
||||
ра |
AB |
|
bz az 2 . |
|
|
|
|
|
|
|
||||||||
Проекция вектора на ось
Осью называется прямая с лежащим на ней единичным вектором l0 (ортом), задающим положительное направление на прямой.
7
Проекцией прl a вектора a на ось l называется направленный отрезок на оси l , алгебраическое значение ко-
|
|
|
cos |
|
|
- |
торого равно числу прl a |
a |
a |
cos(a , l0 ) , где |
угол между вектором и осью l .
Проекции обладают свойствами:
1)прl a b прl a прl b ;
2)прl a прl a .
|
Декартовы прямоугольные координаты вектора OM |
|
, ay |
,az рав- |
||||||||||||||||||
|
a ax |
|||||||||||||||||||||
ны проекциям этого вектора на оси Ox , Oy , Oz соответственно: ax |
|
|
|
a |
|
cos , |
||||||||||||||||
|
|
|||||||||||||||||||||
ay |
|
|
|
|
cos |
, az |
|
a |
|
cos , |
где |
, , – углы, |
которые составляет |
|||||||||
|
|
|
|
|
||||||||||||||||||
|
|
a |
|
|
|
|||||||||||||||||
вектор a с координатными осями Ox , |
Oy , |
Oz . |
|
|
|
|
|
|
|
|||||||||||||
|
Косинусы углов ( cos , |
cos , cos ) |
|
|
|
|
|
|
|
|||||||||||||
вектора |
|
ax , ay |
,az с векторами базиса |
i , j , k |
|
|
|
|
|
|
|
|||||||||||
a |
|
|
|
|
|
|
|
|||||||||||||||
называются направляющими косинусами век- |
|
|
|
|
|
|
|
|||||||||||||||
тора a . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
||||
|
Вектор a0 |
|
|
|
cos , |
cos , cos |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
представляет собой вектор единичной длины в |
|
|
|
|
|
|
|
|||||||||||||||
направлении вектора a . |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
1.4. Скалярное произведение векторов |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скалярным произведением a b |
ненулевых векторов a č b называется |
||||||||||||||||||||
число, равное произведению длин этих векторов на косинус угла между ними:
a b a b cos .
Скалярное произведение обладает свойствами:
1.a b b a ;
2.a b a b ;
3. |
|
|
|
|
|
|
; |
a |
b c |
a |
c |
b c |
|||
4. |
a a 0 , если |
|
|
; |
|
||
a 0 |
|
||||||
8
|
b 0 |
|
|
5. a |
, лишь если a 0 |
или (и) b 0 , или a b . |
Выражение скалярного произведения векторов в декартовых координатах
Теорема. Если два вектора a и b |
определены своими декартовыми прямо- |
||
угольными координатами |
|
,ay |
,az , b bx ,by ,bz , то скалярное произве- |
a ax |
|||
дение этих векторов равно сумме произведений их соответствующих координат, то есть
a b axbx ayby azbz .
|
|
|
|
|
|
|
Доказательство. a b axi |
ay j azk bxi |
by j |
bzk axbx ( i |
i ) |
||
axby i j axbz i k aybx j i ayby j j aybz j k azbx k i azby k j azbz k k .
|
2 |
|
|
|
2 |
1, аналогично j j 1, |
k k 1; |
Но i i |
|i | |
cos i ,i |
|
|i | |
|||
|
|
|
|
|
|
|
|
i j i k |
j i j k k i k j 1 1 cos 90o 0; |
||||||
a b axbx ayby azbz .
Геометрические приложения скалярного произведения векторов в декартовой системе координат
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
|
|
|
|
|
|
|
|
|
|
2 |
ay |
2 |
|
2 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
a |
|
|
a |
a |
|
= ax |
|
az |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
axbx ayby azbz |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
a b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
2. |
cos a , b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
2 |
2 |
|
|
2 |
|
2 |
2 |
2 |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
b |
|
|
|
|
|
ax |
ay |
az |
|
bx |
by |
bz |
|
|
|
|
|
||||||||||||||
Проекция ďđ a вектора a на вектор |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ax bx ay by |
az bz |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a b |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прb a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
bx2 by2 bz2 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
3. |
Направляющие косинусы вектора a : |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
cos |
|
|
|
|
|
ax |
|
|
|
|
|
, cos |
|
|
|
|
ay |
|
|
, cos |
|
|
az |
|
. |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ax2 ay2 az2 |
|
|
|
|
|
|
|
|
|
ax2 a2y az2 |
|
|
|
|
|
|
ax2 ay2 az2 |
|
|
|||||||||||||||||
4. Для направляющих косинусов справедливо соотношение
cos2 cos2 cos2 1.
9