XIII Международная научно-практическая конференция «СОВРЕМЕННЫЕ ТЕХНИКА И ТЕХНОЛОГИИ»
ными требованиями по напряжению - единицы кВ, частоте - сотни Гц и с определенной энергией импульса.
Врезультате проработки выбора элементной базы мы остановились на использовании IGBT (MOSFET) транзисторов в качестве ключевых элементов. Обработка данных, подача стартовых импульсов осуществляется микроконтроллером.
Воснову схемотехнического решения положена схема емкостного накопителя. (Фиг. 1)
VD
L
Реактор
C
VT
Г (СУ) 
Фиг.1. Схема электроразрядного генера-
тора.
Конденсатор достаточной емкости заряжается от внешнего источника напряжение Uп=300-500В. Далее замыканием ключевого элемента происходит разряд конденсатора на нагрузку (в нашем случае реактор с маслом). После чего ключ запирается и процессы повторяются. Поскольку время заряда конденсатора много больше времени разряда и составляет соответственно порядка 1000мкс для заряда и 5-10 мкс для разряда, то в схеме осуществляется резонансный заряда конденсатора, позволяющий зарядить его до двойного напряжения питания (Uc=2Uп) за
время τ = π  LC . Как указано выше время
LC . Как указано выше время
разряда конденсатора мало и таким образом он успевает разрядиться до момента начала запирания ключевого транзистора. Т.о. процесс запирания происходит без наличия на нем напряжения. Благодаря этому энергетические потери состоят в основном из активных потерь за время отпирания транзистора
(tотп ~ 20нс).
В схему заведен датчик обратной связи посредством которого снимаются данные о напряжении электродов и токе реактора.
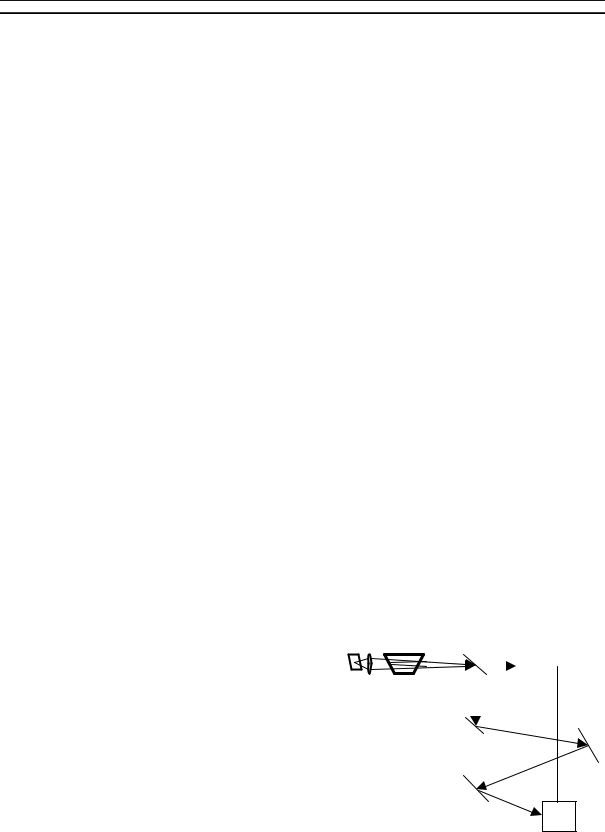
Генератором управляющих импульсов для отпирания и запирания транзистора (Фиг. 2) является микроконтроллер (МК) с выхода которого импульсы подаются на микросхему драйвера, усиливаются до нужного напряжения и тока, после чего подаются на затвор транзистора.
Использование частоты квантования МК
f=8МГц, позволяет с достаточно хорошей точностью опрашивать датчики с реактора и применять широтно-импульсную модуляцию (ШИМ). На данный момент обработка данных с датчика осуществляется 10-разрядным аналого-цифровым преобразователем (АЦП).
|
АЦП |
Датчик |
|
напряжения |
|
|
|
|
МК |
|
Реактор |
|
|
|
|
Драйвер |
Транзисторный |
|
ключ |
|
|
|
Фиг. 2. Структурная схема СУ и заведения обратной связи.
В ходе дальнейшей доработки предполагается установить 24 разрядный сигма-дельта АЦП и вместо МК использовать DSP (Digital Signal Processor), что позволит на несколько порядков повысить эффективность обработки данных и обрабатывать показания одновременно с нескольких датчиков. Что в свою очередь скажется на эффективности регенерации трансформаторного масла, а значит и на качестве конечного продукта.
Перспективы
Поскольку нагрузочный характер реактора мало предсказуем и имеет ярко выраженные индуктивные свойства, то достаточно весомой проблемой является создание генератора электрических импульсов для данного реактора. По предварительным оценкам данная проблема может быть решена в течении 8-12 месяцев. И таким образом, с условием проведения последующих исследований и испытаний срок завершения работы над установкой не превышает 4 года.
На данный момент на мировом рынке не присутствует мобильного оборудования подобного типа.
ЛИТЕРАТУРА:
1.Топлива, смазочные материаллы, технические жидкости. Ассортимент и применение: Справочник / И.Г. Анисимов, К.М. Бадыштова, С.А. Бнатов и др.; под ред. В.М. Школьникова. Изд. 2-е перераб. и доп. - М.: Издательский центр "Техинформ", 1999. - 596с.: ил.
2.Изучение состава и кинетики образования продуктов эрозии металлической загрузки электроразрядного реактора / Н.Б Даниленко, Г.Г.Савельев, Н.А. Яворовский, Т.А. Юрмазова, А.И. Галанов. П.В. Балухтин / Журнал прикладной химии. 2005. Т. 78. Вып. 9
/стр. 1463-1468
3.http://www.master-oil.com/theory/2/
162

Современные техника и технологии 2007
ПРОМЫШЛЕННОЕ ОБОРУДОВАНИЕ ОБРАБОТКИ МАТЕРИАЛОВ С ЧАСТОТНО-ПРОГРАМНЫМ УПРАВЛЕНИЕМ
Волынцев А.А.
Томский Политехнический Университет, г. Томск, пр. Ленина, 30 E-mail: icewind@sibmail.com
На данный момент Российский рынок технологического оборудования для обработки материалов (фрезерная обработка древесины и металлов, установки плазменной и лазерной резки) заполнен станками с ЧПУ иностранного производства. Бесспорно, можно найти множество достоинств импортного оборудования, однако цена его значительно завышена, и далеко не каждое предприятие желающее наладить обрабатывающее производство способно приобрести станки в ценовой категории 50 000 - 210 000 евро и более.
Всвязи с этим перед нами была встала задача разработки станков с ЧПУ не уступающих по техническим характеристикам образцам иностранного производства, и в тот же момент стоимость которых была бы более приемлема для Российского потребителя.
Входе проработки проблемы были соз-
даны:
-система управления шаговыми двигателями (СУ) от Персонального Компьютера (ПК) для трех координат обработки материала.
-Макет станка для 2.5 координат. Поскольку поставлено требование о сни-
жении стоимости оборудования при сохранении его функциональных свойств, то было принято решение об использовании шаговых двигателей (ШД) для перемещения обрабатывающей головки.
Основной проблемой в создании такого оборудования является создание системы управления шаговыми двигателями от управляющей программы, установленной на ПК. Так как первоначальные макеты создаются в основном в CAD пакетах, Solid Works, Компас пакетах, то в идеальном случае необходимо, чтобы файлы имеющие разрешение данных пакетов воспринимались управляющей программой, автоматически составлялся файл G- кода, по которому этой же программой посылаются на станок импульсы управления. Такой вариант вполне имеет право на сущест-
вование при обработке простых деталей. Однако при сложных 3-D макетах алгоритмы программ допускают серьезные ошибки трассировки, приводящие в итоге к нерациональной траектории прохождения обрабатывающего инструмента. Таким образом, при обработке сложных деталей избежать оптимизации G-кода в дополнительных пакетах инженером избежать на данный момент не представляется возможным. С учетом того, что разработка программных пакетов является весьма долгим, дорогостоящим процессом, а также с учетом того, что Российская реальность не позволяет окупить трудозатраты и финансовые вложения в разработку ПО, то данный аспект разработки был отложен и внимание сконцентрировано на разработку СУ двигателями станка и связью с ПК.
Поскольку стоит задача максимально уменьшить стоимость СУ и не потерять ее функциональных свойств, то для разработки макета было принято решение использовать в основе СУ специализированные контроллеры шаговых двигателей в нестандартном схемотехническом исполнении. На данном этапе разработок принято решение использовать для связи LPT порт персонального компьютера, т.к. он осуществляет параллельную передачу данных и совместим по уровню токов и напряжений с выбранной элементной базой. Благодаря этому отпала необходимость в установке дополнительного микроконтроллера и согласования уровней, что было бы неизбежно при использовании последовательных интерфейсов таких как: RS-232, RS-432, USB 1.0, USB 2.0 и т.д. Возможность применения беспроводной связи отсутствует по причине наличия мощных электромагнитных помех в производственных цехах, что приводит к сбою систем приемо-передачи.
Структурная схема СУ представлена на Рис. 1.
163