

Современные техника и технологии 2007
Рис.1. Прямоугольная ванна
В среде FEMLAB, используется модуль
Conductive media DC.
1Создается геометрическая модель.
2Задаются параметры граничных условий и электролита.
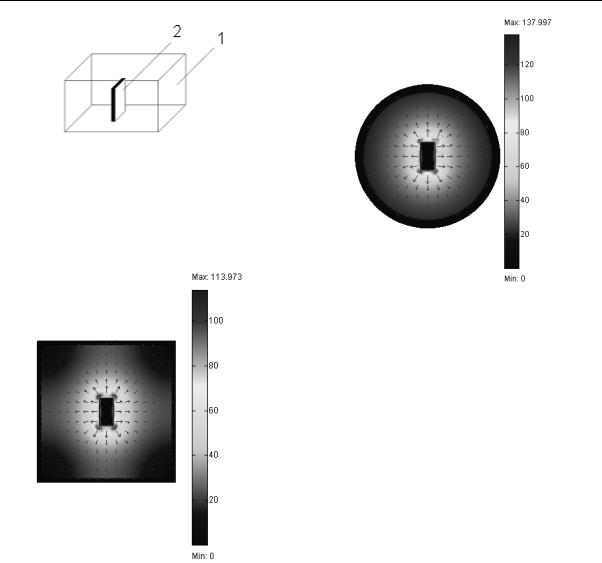
Рис.3. Напряженность электрического поля в прямоугольной ванне
− div(σ × gradϕ × J e ) = Qe ,
где:
σ проводимость электролита 271 ом- 1*г/экв*см2
Je плотность тока
Qe сила тока от источника питания 800А 3 Строится график распределения элек-
триче-ского поля.
На рисунке 3 представлен график рас- пределе-ния напряженности электрического поля в прямо-угольной ванне. На рисунке 4 график распределе-ния напряженности электрического поля в цилин-дрической ванне.
Вывод
Из полученных распределений на рисунках 3 и 4 видно, что напряженность электрического поля больше на углах изделия, в следствии на углах изделия скорость роста оксидного покрытия будет больше, чем на других частях изделия. Напряженность электрического поля в цилин-дрической ванне численно больше напряженности электрического поля в прямоугольной ванне, что видно из максимального значения напряженности представленного на графиках. Отсюда следует что скорость роста оксидного покрытия в цилин-дрической ванне будет больше чем в прямо-угольной.
Благодарности
Данная работа проводилась в рамках выполнения аналитической ведомственной целевой программы “Развитие научного потенциала высшей школы (2006-2008 годы)” РНП 2.1.2.5253. Автор выражает благодарность своему научному руководителю Борикову В.Н. и профессору Мамаеву А.И. за оказанную помощь и содействие при выполнении работы.
ЛИТЕРАТУРА:
1.Тихонов А.Н. Уравнения математической физики: учеб. пособие для физ.-мат. специальностей вузов / А.Н. Тихонов, А.А.Самарский.- 5-е изд. - М.: Наука, 1987, с. 277-283
2.Горчаков А.И. Влияние геометрических параметров микродугового оксидирования на равномерность покрытий, формируемых на алюминиевых сплавах / А.И Горчаков, А.В
145

XIII Международная научно-практическая конференция «СОВРЕМЕННЫЕ ТЕХНИКА И ТЕХНОЛОГИИ»
Семенова, Ю.В. Сыроватская. // Физика и хи- |
3. Мамаев А. И. Сильнотоковые процессы |
мия обработки материалов. – 2004, №1 с. 43- |
в растворах электролитов / А. И. Мамаев, В. |
47 |
А. Мамаева. – Новосибирск: Издательство СО |
|
РАН, 2005. – 255с. |
О МЕТРОЛОГИЧЕСКОМ ОБЕСПЕЧЕНИИ ГИРОСКОПИЧЕСКИХ И МАГНИТНЫХ ИНКЛИНОМЕТРОВ
Бескровных М.А., Голиков А.Н.
Томский политехнический университет, Россия, г. Томск, пр. Ленина, 30 E-mail: nilis@tpu.ru
Геофизические исследование пространственного положения оси скважин проводят с помощью сложных измерительных комплексов – инклинометров, которые состоят из скважинного прибора (СП) и наземной аппаратуры (НА), соединенных между собой каротажным кабелем.
Траекторию скважин определяют в ортогональной, географически ориентированной системе координат (СК), начало которой располагается в устье скважины. Положение линии, касательной к оси скважины в определенной точке, задается двумя углами: зенитным (углом между касательной и вертикалью места) и азимутом плоскости наклонения (углом в горизонтальной плоскости между направлением на Север и проекцией касательной на эту плоскость).
Существуют гироскопические и магнитные инклинометры, основное отличие которых заключается в том, что гироскопические не чувствительны к воздействию магнитных полей.
Измерения азимутов гироскопическими инклинометрами производят относительно географического меридиана, а магнитными – относительно магнитного меридиана, направление которого показывает магнитная стрелка компаса или буссоли. Магнитный и географический меридианы, как правило, не совпадают, так как не совпадают географические (Nг, Sг) и магнитные (Nм, Sм) полюса. Угловое расстояние между меридианами принято называть магнитным склонением D (рис.1). Естественное значение склонения в точке места не постоянно во времени как по величине, так и по направлению. Например, суточное изменение D средней полосе России может достигать 15′ [1].
Рис. 2. Географическая СК XгYгZг и СК XмYмZм, ориентированная относительно магнитного меридиана
В последнее время наибольшее распространение получают гироскопические системы ориентации с принципом гирокомпасирования. Принцип основан на использовании в качестве опорных направлений вектора абсо-
лютной угловой скорости Земли Ωз и вектора ускорения силы тяжести g . Для этого в гиро-
инклинометрах используются высокоточные инерциальные чувствительные элементы – гироскопические измерители угловой скорости и акселерометры.
В магнитных же инклинометрах опорными направлениями служат вектор напряженности
магнитного поля Земли T и также вектор ускорения силы тяжести g . В этом случае ос-
новой, для построения системы, являются магниточувствительные элементы – феррозонды и акселерометры
На рис. 2 показана общая структурная схема скважинного прибора. В зависимости от принципа построения прибора могут применяться гироскопы и акселерометры, либо феррозонды и акселерометры.
146

Современные техника и технологии 2007
Рис.2. Структурная схема скважинного прибора 1-двухкомпанентный гироскопический изме-
ритель абсолютной угловой скорости; 2- трехстепенный гироскоп; 3- трехкомпонентный феррозонд; 4-акселерометр; 5-схемы обработки ЧЭ; 6-датчик температуры; 7- коммутатор; 8-АЦП; 9-микроконтроллер; 10блок питания; 11-источник опорного напряжения.
Значения азимута плоскости наклонения, измеренные магнитными и гироскопическими инклинометрами, должны отличаться на величину магнитного склонения D. Результаты измерений зенитных углов приборами, как правило, совпадают.
Всвязи с возрастающими потребностями
кточности проводки скважин, повышаются требования к метрологическим параметрам измерительных систем и условиям их контроля.
Контроль нормируемой погрешности измерительных каналов приборов осуществляется при их калибровках, путем сравнения значений измеряемых параметров пространственной ориентации СП с задаваемыми значениями. Калибровка проводится в наземных лабораторных условиях на специальных немагнитных наклонно-поворотных установках, одна из которых показана на рис.3. Установки позволяют задавать угловое пространственное положение скважинных приборов с нормируемой погрешностью.
Рис. 3. Установка поверки инклинометров УПИ-1
Как правило, геофизические предприятия имеют одну или несколько установок, на которых могут выполнять калибровку каналов измерения углов ориентации как гироскопических, так магнитных инклинометров. При этом могут возникать проблемы при согласовании начала отсчетов шкал азимутов в зависимости от калибруемого прибора, так как выставку шкал азимутов установок, в основном, осуществляют с помощью магнитных буссолей, стрелки которых устанавливаются в направлении магнитного меридиана. И для того, чтобы привести шкалу к отсчетам относительно географического меридиана, ее необходимо довернуть на величину угла местного магнитного склонения D, значение которого дается геодезическими службами для данного района без учета локальной магнитной обстановки, которая постоянно меняется
[2].
Неоднородности магнитного поля является проблемой при калибровке магнитных инклинометров. Поэтому предприятия определяют магнитную обстановку в области рабочих углов СП, задаваемых наклоноповоротной установкой, чтобы исключить погрешности от неоднородности магнитного поля из показаний калибруемых приборов. Существуют методы оценки неоднородности магнитного поля, один из которых (СТ ЕАГО- 033-01) заключается в определении однородности в лаборатории (в зоне рабочих улов СП) с использованием калибровочной установки с теодолитом, буссоли и имитатора скважинной части инклинометра. Метод заключается в измерении направления горизонтальной составляющей магнитного поля в зоне возможных положений чувствительных элементов азимута испытываемого инклинометра. Измерения проводят во всем диапазоне азимутов по показаниям буссоли, которую закрепляют на имитаторе.
Другой метод применяется на кафедре точного приборостроения Томского политехнического университета. Он, позволяет определять фактические значения магнитного склонения с точностью не более 18 угловых минут в горизонтальной сетке с шагом 1×1 м на разных уровнях от пола. При измерениях применяются теодолит с буссолью и наземный гирокомпас. По получаемым данным узловых значений склонения строится диаграмма изменения магнитного склонения по высоте помещения, в виде D-поверхности. На Рис. 4, в качестве примера, приведена одна из таких диаграмм, показывающая характер изменения склонения относительно плоскости магнитного меридиана.
147

XIII Международная научно-практическая конференция «СОВРЕМЕННЫЕ ТЕХНИКА И ТЕХНОЛОГИИ»
Рис. 4. D-поверхность
Измерения, выполняемые приведенными методами в помещениях, где выполняются калибровки магнитных инклинометров, показывают, что однородность магнитного поля порой далеки от требуемых норм, которые устанавливают разброс значений склонения не более 15'. Фактически разброс значений D может достигать нескольких градусов. Такие искажения определяться наличием скопления электроизмерительной аппаратуры,
стального инструмента, стальных элементов конструкций других СП, например, гироскопических и других ферромагнитных предметов вносимых в помещение.
Поэтому в качестве неотъемлемой части условий метрологического обеспечения гироскопических и магнитных инклинометров, а так же для повышения точности и достоверности выполняемых работ при их калибровке необходимо уделять особое внимание магнитной обстановке внутри лаборатории и периодически определять значение магнитного склонения и характера его изменения.
ЛИТЕРАТУРА:
1.Передерин В.М., Чухарева Н.В., Антропова Н.А. Основы геодезии и топографии: Учебное пособие. – Томск: Изд – во ТПУ, 2005. – 127с.
2.Белянин Л.Н., Голиков А.Н. О метрологическом обеспечении систем гирокомпасирования в каналах азимутов инклинометров// Автоматизация и информационное обеспечение технологических процессов в нефтяной промышленности: Сб. трудов ОАО НПФ “Геофит” ВНК. Т.2. Томск: Изд-во Том. Ун-та, 2002. с.70-77.
СПОСОБ КОМПЕНСАЦИИ ДЕЙСТВИЯ ВЕРТИКАЛЬНОЙ ГАРМОНИЧЕСКОЙ ВИБРАЦИИ НА ГИРОМАЯТНИК
Бочкарева Е.С., Иванова В.С.
Томский политехнический университет, Россия, г. Томск, пр. Ленина, 30 e-mail: dtps@lcg.tpu.ru
Вибрация влияет на точность и надежность гироскопических приборов. Устранение вибрации – это одна из актуальных тем со дня создания гироскопических приборов до настоящего времени. Т.к. вибрация прибора на объекте является причиной повышенного ухода гироскопа, то снижается ресурс работы гироскопических устройств, надежность и стабильность показаний. До настоящего время проблема полного или частичного устранения вибрации гироскопических приборов так и не решена.
В данной статье, представлены результаты исследований возможности использования метода компенсации действия вертикальной гармонической вибрации на гироскоп со сме-
щенным центром масс, на примере гиромаятника.
Метод основан на возможности замены действия вибрации – вибрационной силой, которая эквивалентна действию вибрации основания.
Для простоты исследуются укороченные уравнения движения гиромаятника с компенсирующими моментами, более подробно их составление и решение [1]:
& |
|
m (S0 |
ω)2 |
|
||||
H ψ |
+ (m g l + |
|
2 |
|
|
− Mкв) ϑ = 0 |
, |
|
|
|
|
m (S0 |
ω)2 |
|
|||
|
ϑ& + (m g l + |
|
||||||
− H |
|
|
|
|
− Mкс) ψ = |
0 |
||
|
2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
где m, l – конструктивные параметры гиромаятника;
148

Современные техника и технологии 2007
S0, ω – амплитуда и частота вибрации; H – кинетический момент;
g – ускорение свободного падения; Mкв и Мкс – корректирующие моменты
Mк = 1 m (S0 ω)2 ϕ0 ,
H 2
где ϕ0 – угол неперпендикулярности рамок.
После определения закона движения гиромаятника установлено, что действие вибрации основания гиромаятника, может быть устранено системой межрамочной коррекции по осям подвеса гироскопа. Моменты межрамочной коррекции по осям подвеса гиромаятника ВВ и СС одинаковой величины, и при учете их в системе уравнений, они компенсируют действие вибрационной силы на гиромаятнике. Вследствие, чего гиромаятник ведет себя так же, как на неподвижном основании.
Уравнения движения гиромаятника на неподвижном основании имеют следующий вид:
& |
|
|
m g l |
|
|
+ |
|
|
|
ϑ = 0 |
|
ψ |
|
H |
|||
|
|
|
|
||
|
|
m g l |
|
||
& |
|
|
|||
ϑ |
− |
|
H |
ψ = 0 |
|
|
|
|
|
||
Предлагаемая схема компенсации вредных моментов на гиромаятнике представлена на рисунке 1. В гиромаятник вводится система межрамочной коррекции по осям подвеса.
В состав схемы коррекции входят: акселерометр (Az),установленный на основании и следит об отклонении главной оси, датчики угла (ДУ1 и ДУ2), информация с которых также, как и с акселерометра поступает на интегратор (Инт.), затем на вычислительные устройства (ВУ1, ВУ2) и полученная величина, в виде цифрового сигнала поступает на датчики моментов (ДМ1 и ДМ2), расположенные по осям ВВ и СС, создаются компенсирующие моменты, равны по величине и противоположно направленные вредным моментам, тем самым происходит компенсация.
Рисунок 1.Схема компенсации вредных моментов
Следовательно, моменты межрамочной коррекции Mкв и Mкс устраняют действие вибрационной силы на гиромаятнике. Таким образом, использование предлагаемого метода позволяет компенсировать действие вибрации и перевести вибрационную погрешность из случайной в методическую. Тем самым погрешность можно рассчитать и эффективно устранить.
ЛИТЕРАТУРА:
1.Иванова В.С. Вибрационные силы и их проявление в гироскопе со смещенным центром масс при вибрации основания. Диссертация на соискание уч. ст. канд.тех.наук. –
Томск,2003.
2. Павловский М.А. Теория гироскопов. – К.: Вища школа. Головное изд-во,1986.– 303с 3.Пельпор Д.С. Гироскопические системы. Элементы гироскопических приборов. Ч.3 –
М.:”Высшая школа” 1972 4.Сайдов П.И. Теория гироскопов, Ч.1,М:
”Высшая школа”,1965. –472с.
149