

2760.Практикум по теории механизмов и механике систем машин
..pdfполя будет выполняться условие, что во время работы кулачка угол передачи γ на всех фазах не будет меньше γmin. На рис. 6.12 за центр вращения кулачка взята точка O1. Расстояние O1B0 дает величину в масштабе μS = μl .
Расстояние aw = O1C называется межосевым.
Рис. 6.12. Совмещенный график перемещения кулачка с коромыслом
Построение профиля кулачка показано на рис. 6.13. Из произвольной точки O1 проводят окружность радиусом O1B0. Масштаб построения профиля может быть сохранен или взят другим, тогда новый масштаб
μS1 = μl1 = (O1C)μS ,
O1C0
где (O1C)μS – осевое расстояние (истинное), определяемое согласно рис. 6.12; O1С0 – отрезок, изображающий осевое расстояние в новом масштабе μl1 построения профиля (см. рис. 6.13).
161

Рис. 6.13. Построение профиля кулачка с коромыслом
На этой окружности от точки C0 в сторону, противоположную вращению кулачка, откладывают фазовые углы, которые, в свою очередь, делят на соответствующее число равных частей, как и на графике перемещения. На рис. 6.13 деление нанесено через одно: 0, 2, 4 и т.д. Из точки O1 радиусом Rmin проводят окружность, а из точки C0 радиусом, равным длине коромысла B0C0, – дугу, на которой откладывают дуговой путь согласно графику перемещений. Полученные точки дают положения коромысла при повороте кулачка на соответствующий угол. Из точки O1 как из центра проводят окружности через точки деления дуги B0D. Из точек C1; C2 и т.д. циркулем делают засечки на соответствующих окружностях радиусом B0C0. Полученные таким образом точки принадлежат центровому профилю кулачка. Соединив их плавной кривой, получают центровой профиль.
Радиус ролика и конструктивный (практический) профиль кулачка определяется так же, как и для кулачкового механизма с поступательно движущимся толкателем.
162
6.9.Определение минимальных размеров кулачка
сплоским толкателем
Метод «Задача Геронимуса»
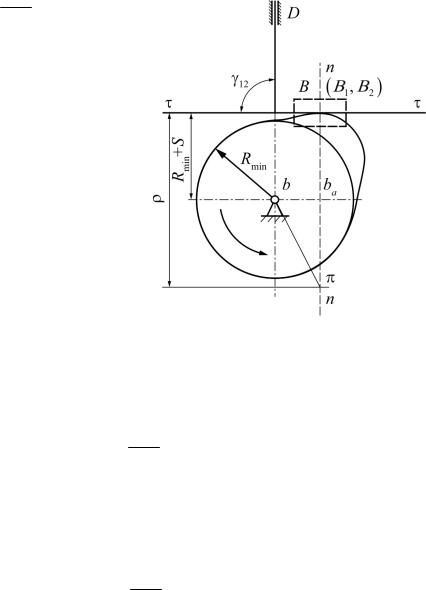
Если толкатель оканчивается плоскостью, то, очевидно, угол передачи остается постоянным во время работы механизма. В нашем случае (рис. 6.14) этот угол γ12 = 90°, мы получаем наивыгоднейшие с точки зрения углов передачи условия работы кулачкового механизма.
Но для таких типов кулачков должно выполняться условие, чтобы контур кулачка был всегда выпуклым. Для этого необходимо, чтобы
Rmin + S > − d 2S .
dϕ2
Это условие вытекает из следующих соображений (см. рис. 6.14). Строим заменяющий механизм и план ускорений с полюсом π. Отрезок πb в масштабе ω12 дает модуль ускорения aB1 . Отрезок πbα представляет собой
аналог ускорения в точке контакта B (точка B1 принадлежит кулачку, а B2 – толкателю) кулачка и толкателя в данный момент:
aB2 = ω12 (πbα ) = |
d 2S |
= |
d |
2S |
ω12. |
dt2 |
dϕ2 |
||||
Рис. 6.14. Кулачковый механизм с плоским толкателем
Так как ω1 = const, то
πbα = d 2S . dϕ2
Следовательно, радиус кривизны профиля в точке соприкосновения ρ = Rmin + S + d 2S / dϕ2. Во всех случаях должно быть р > 0 или
Rmin + S + d 2S > 0,
dϕ2
163

следовательно,
R |
+ S > |
d |
2S |
. |
(6.1) |
d |
|
||||
min |
|
ϕ2 |
|
||
Разделим левую и правую части выражения (6.1) на (Rmin + S ) , получим
− d 2S
dϕ2 < 1
Rmin + S
или
− |
d 2S |
|
|
|
|
|
|
dϕ2 |
|
< tg45°. |
|
|
(6.2) |
|
|
|
|
|
||
Rmin + S |
|
|
|
|||
|
|
|
Последнее условие |
позволяет |
||
|
|
|
провести |
следующее графическое |
||
|
|
|
построение (рис. 6.15). По диаграм- |
|||
|
|
|
мам |
S = f (ϕ) и d 2S / dϕ2 = f (ϕ) |
||
|
|
|
строим |
|
совмещенный |
график |
S = f (d 2S / dϕ2 ).
Для этого производим разметку перемещений звена 2 по оси OS2 и откладываем на проведенных горизонтальных прямых значения d 2S / dϕ2 . Соединив полу-
|
ченные точки плавной кривой, по- |
|
Рис. 6.15. Совмещенный график |
лучаем диаграмму |
|
S = f (d 2S / dϕ2 ). |
||
S = f (d 2S/dφ2) |
||
|
В той части диаграммы, кото- |
рая соответствует отрицательным максимальным значениям d 2S / dϕ2 , проводим под углом 45° к оси S2 касательную τ'–τ' к кривой диаграммы и получаем точку A' и минимальный радиус кулачка при данном угле 45°.
Согласно неравенству (6.2) центр вращения А кулачка должен быть расположен ниже точки A'. Величина отрезка АО в масштабе построения дает величину Rmin.
164
6.10. Алгоритм проектирования кулачкового механизма аналитическим методом
При проектировании кулачкового механизма рекомендуется следующий порядок действий:
1.После ознакомления с исходными данными и условиями работы механизма составить блок-схему для программы на языке РASКAL, BASIК и др. по расчету и проектированию кулачкового механизма. Ознакомившись с инструкцией по вводу данных в программу SK11, исходные данные оформить на бланке ФОРТРАН или ввести их с дисплея. Алгоритм расчета при проектировании кулачкового механизма представлен на рис. 6.16.
2.Для овладения практическими навыками численного и графического интегрирования вычертить на листе графики ускорения, скорости
иперемещения, т.е. выполнить кинематический анализ. Сопоставить с результатами вычислений на компьютере и рассчитать масштабы изображенных величин.
3.На фазовой плоскости (θB ,ω1, SB ) изобразить фазовый портрет для
конкретной схемы механизма, определить область допустимых решений для заданных условий работы кулачкового механизма и выбрать в этой области положение оси O1 вращения кулачка. Сопоставить выбранные размеры с результатами расчетов на компьютере.
4.Построить профиль кулачка по результатам вычислений на компьютере и показать методику определения координат двух–трех точек графическими построениями.
5.Построить график изменения угла давления θ в функции угла поворота кулачка. На профиле кулачка показать максимальные углы давле-
ния θ3 и θ4 при ϕ13 (F13 ) и ϕ14 (F14 ) и сравнить их с допускаемым углом
давления θдоп .
6. Оформить пояснительную записку по разделу «Проектирование кулачкового механизма», показав в ней алгоритм расчетов, методику ввода и вывода данных, и приложить распечатку результатов расчета.
165
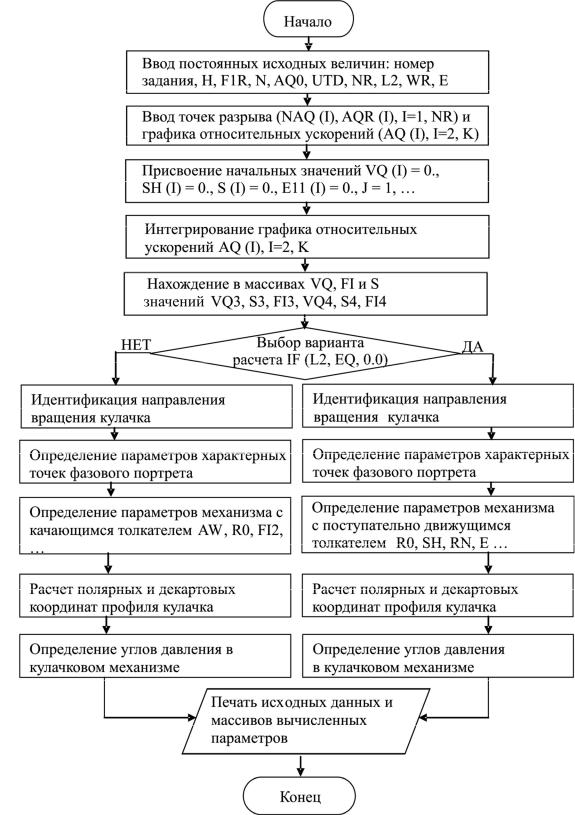
Рис. 6.16. Алгоритм расчета кулачкового механизма
166
Задачи для выполнения практической работы по проектированию кулачкового механизма
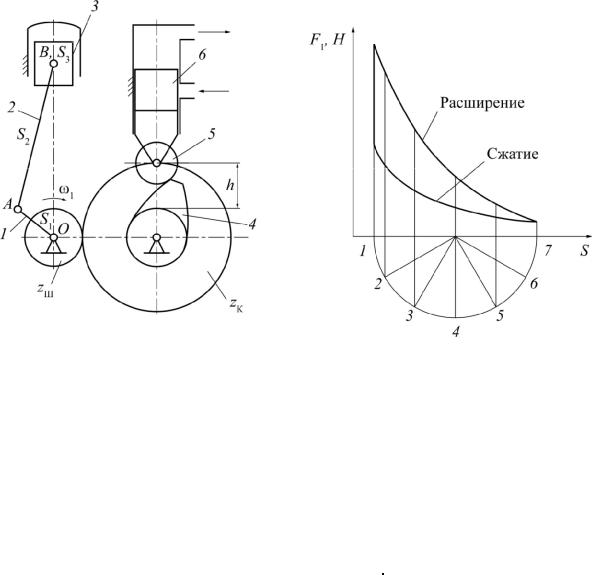
Задание 1. Двухтактный одноцилиндровый двигатель
Кинематическая схема. Двухтактный двигатель содержит кривошипноползунный механизм, состоящий из звеньев 1, 2, 3, и кулачковый привод гидроклина, состоящий из звеньев 4, 5, 6. Кулачок получает вращение через зубчатые колеса zш и zк.
Параметр |
Обозна- |
|
|
|
|
|
|
|
|
|
|
|
|
кулачкового |
|
|
|
|
|
Вариант |
|
|
|
|
|
||
механизма |
чение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ход движения |
h, мм |
10 |
9 |
8 |
11 |
12 |
8 |
9 |
10 |
11 |
12 |
8 |
10 |
толкателя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ0у |
60 |
80 |
100 |
60 |
80 |
100 |
60 |
120 |
80 |
1000 |
80 |
60 |
Фазовые углы |
|
|
|
|
|
|
|
|
|
|
|
|
|
φ0дс |
10 |
20 |
10 |
20 |
10 |
20 |
20 |
20 |
30 |
10 |
30 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φс |
80 |
100 |
60 |
120 |
100 |
80 |
120 |
60 |
80 |
80 |
80 |
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Закон движения |
параболический |
синусоидальный |
косинусоидальный |
параболический |
синусоидальный |
косинусоидальный |
параболический |
синусоидальный |
косинусоидальный |
синусоидальный |
параболический |
косинусоидальный |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
167
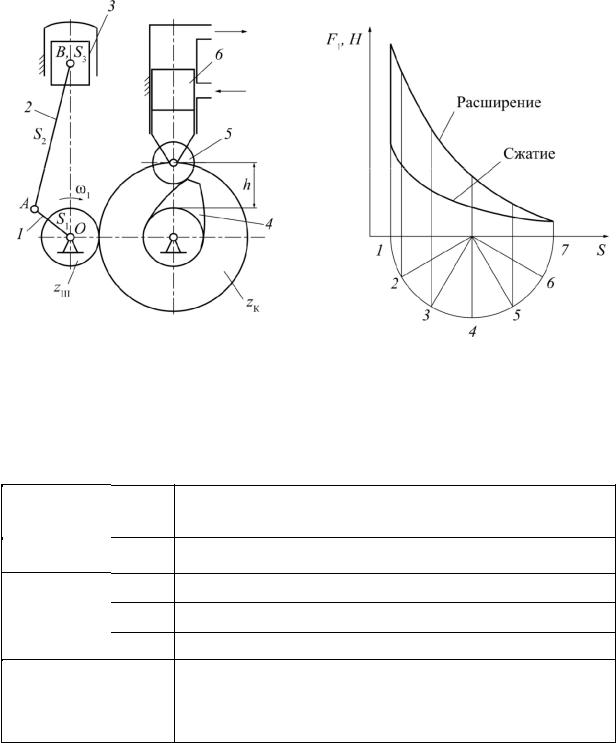
Задание 2. Двухтактный одноцилиндровый двигатель
Кинематическая схема. Двухтактный двигатель содержит кривошипноползунный механизм, состоящий из звеньев 1, 2, 3, и кулачковый привод гидроклина, состоящий из звеньев 4, 5, 6. Кулачок получает вращение через зубчатые колеса zш и zк.
Параметр |
Обозна- |
кулачкового |
|
механизма |
чение |
|
|
Ход движения |
h, мм |
толкателя |
|
|
φ0у |
Фазовые углы |
φ0дс |
|
φс |
|
|
Закон движения
Вариант
8,0 |
9,0 |
10 |
11 |
12 |
8,0 |
9,0 |
10 |
11 |
12 |
8,0 |
10 |
120 |
100 |
80 |
60 |
60 |
80 |
100 |
120 |
80 |
100 |
80 |
100 |
20 |
30 |
10 |
20 |
30 |
10 |
20 |
30 |
10 |
20 |
10 |
20 |
80 |
60 |
80 |
100 |
120 |
80 |
60 |
100 |
120 |
60 |
60 |
80 |
параболический |
синусоидальный |
косинусоидальный |
параболический |
синусоидальный |
косинусоидальный |
параболический |
синусоидальный |
косинусоидальный |
синусоидальный |
параболический |
косинусоидальный |
|
|
|
|
|
|
|
|
|
|
|
|
168
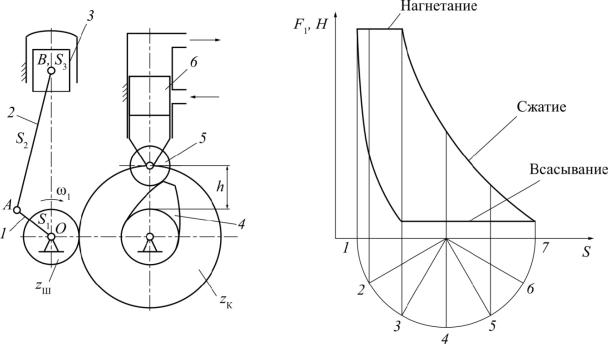
Задание 3. Воздушный одноступенчатый компрессор
Кинематическая схема. Воздушный компрессор содержит кривошип- но-ползунный механизм 1, 2, 3 и кулачковый привод выпускного клапана, состоящий из звеньев 4, 5, 6. Кулачок получает вращение через зубчатые колеса zш и ZK.
Параметр |
Обозна- |
|
|
|
|
|
Вариант |
|
|
|
|
|
|
кулачкового |
чение |
|
|
|
|
|
|
|
|
|
|
||
механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ход движения |
h, мм |
7,0 |
7,0 |
7,0 |
8,0 |
8,0 |
8,0 |
9,0 |
9,0 |
9,0 |
10 |
10 |
10 |
толкателя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ0у |
60 |
80 |
100 |
120 |
120 |
100 |
80 |
60 |
100 |
80 |
120 |
80 |
Фазовые углы |
|
|
|
|
|
|
|
|
|
|
|
|
|
φ0дс |
10 |
20 |
30 |
10 |
20 |
30 |
10 |
20 |
30 |
10 |
20 |
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φс |
120 |
100 |
80 |
60 |
80 |
100 |
120 |
100 |
80 |
60 |
100 |
120 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Закон движения |
параболический |
синусоидальный |
косинусоидальный |
параболический |
синусоидальный |
косинусоидальный |
параболический |
синусоидальный |
косинусоидальный |
синусоидальный |
параболический |
косинусоидальный |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
169
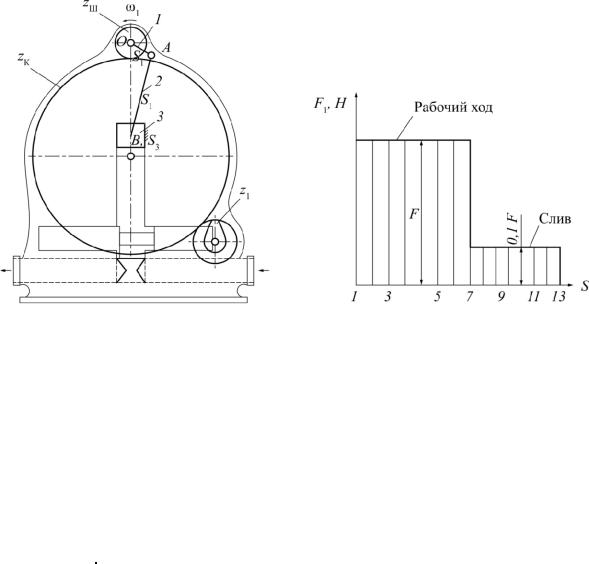
Задание 4. Гидромотор
Кинематическая схема. Гидромотор состоит из кривошипно-ползун- ного механизма 1, 2, 3. Распределительный золотник выполнен в виде толкателя кулачкового механизма, состоящего из звеньев 4, 5. Кулачок получает вращение от главного вала 1 через зубчатую передачу zш, zк, z1.
Параметр |
Обозна- |
|
|
|
|
|
Вариант |
|
|
|
|
|
|
кулачкового |
|
|
|
|
|
|
|
|
|
|
|||
механизма |
чение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ход движения |
h, мм |
8 |
9 |
10 |
12 |
14 |
15 |
14 |
12 |
10 |
8 |
10 |
12 |
толкателя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ0у |
60 |
80 |
100 |
60 |
80 |
100 |
80 |
60 |
100 |
80 |
60 |
100 |
Фазовые углы |
|
|
|
|
|
|
|
|
|
|
|
|
|
φ0дс |
10 |
20 |
30 |
10 |
20 |
30 |
10 |
20 |
30 |
10 |
20 |
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φс |
100 |
120 |
80 |
100 |
60 |
80 |
100 |
120 |
60 |
80 |
100 |
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Закон движения |
параболический |
синусоидальный |
косинусоидальный |
параболический |
синусоидальный |
косинусоидальный |
параболический |
синусоидальный |
косинусоидальный |
синусоидальный |
параболический |
косинусоидальный |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
170