

2760.Практикум по теории механизмов и механике систем машин
..pdfзвена от нулевого
Рис. 2.6. Алгоритм кинематического анализа
Блок-схема может быть дополнена блоком проверки существования механизма, выводами полученных результатов, печатью графиков и т.п. При проведении кинематического анализа систем известны схема рычажного механизма, размеры звеньев и закон движения входного звена. Для удобства дальнейшего изложения введем ряд допущений и обозначений:
1.Углы, образованные звеньями механизма с осью X системы координат, отсчитываются от положительного направления оси X против часовой стрелки, обозначаются через φk.
2.Входное звено механизма обозначается индексом 1, и, например,
вслучае вращательного движения оно имеет известные угловую скорость φ1 и угловое ускорение ε1.
3.Угловая скорость и угловое ускорение k-го звена обозначаются как ωk и εk, а скорость и ускорение точки этого звена как VSK и aSK.
51

4. Значения угловой скорости и углового ускорения звена k выражают-
ся через аналоги угловой скорости этого звена U = |
ωk |
= |
dωk |
и аналог угло- |
|
ω |
dω |
||||
|
|
|
|||
|
1 |
1 |
|
||
|
|
|
|
|
|
U′ |
= |
dUk1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|||||||
вого ускорения |
|
k |
|
|
|
|
следующим образом |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
dω |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωk |
= uk ω1; |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
d |
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
duk |
|
dϕ |
|
2 |
|
|
|||||
|
|
ε |
k |
= |
|
|
|
|
ω = |
|
|
(u |
k |
ω ) = ε u |
+ ω |
|
1 |
|
|
|
1 |
= ε u |
|
+ ω u |
k |
. |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
dt |
k |
|
dt |
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
k |
|
|
|
1 |
|
dϕ1 |
|
dt |
|
1 k |
1 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Для скорости и ускорения точки С справедливы аналогичные соотно- |
|||||||||||||||||||||||||||||||||||||||||||||||||
шения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V = |
dSC |
= |
dSC |
|
dϕ1 |
= V |
|
ω ; |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
dt |
|
|
|
dϕ1 dt |
|
|
|
|
Cϕ |
1 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
a |
|
= |
dVC |
|
|
= |
d |
|
|
(V |
|
ω ) = |
dVCϕ |
|
ω1 |
+ ε V |
, |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
C |
|
|
dt |
|
|
|
|
|
dt |
|
|
Cϕ |
|
|
1 |
|
|
|
|
dϕ1 |
2 |
|
1 Cϕ |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где V |
и |
dVCϕ |
= d |
Cϕ |
– соответственно аналог скорости и ускорения точки С. |
||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Cϕ |
|
dϕ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
5. Отношение длины k-го звена к длине входящего звена обозначается |
|||||||||||||||||||||||||||||||||||||||||||||||||
через λ с соответствующим индексом. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Например, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
k |
|
|
= λ |
|
|
, |
lAS |
2 |
= λ |
|
|
|
|
и т.д. |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l1 |
|
|
|
|
|
|
|
l1 |
|
|
|
|
AS2 |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
6. Так как угол поворота k-го звена является функцией времени, то верны соотношения
d (cosϕk ) = (cosϕk ) = − sin ϕk ϕk = −ωk sin ϕk , dt
d (sin ϕk ) = (sin ϕk ) = − cos nϕk ϕk = −ωk cosϕk . dt
Рассмотрим ряд приемов определения кинематических характеристик некоторых механизмов, широко применяемых в машинах.
52
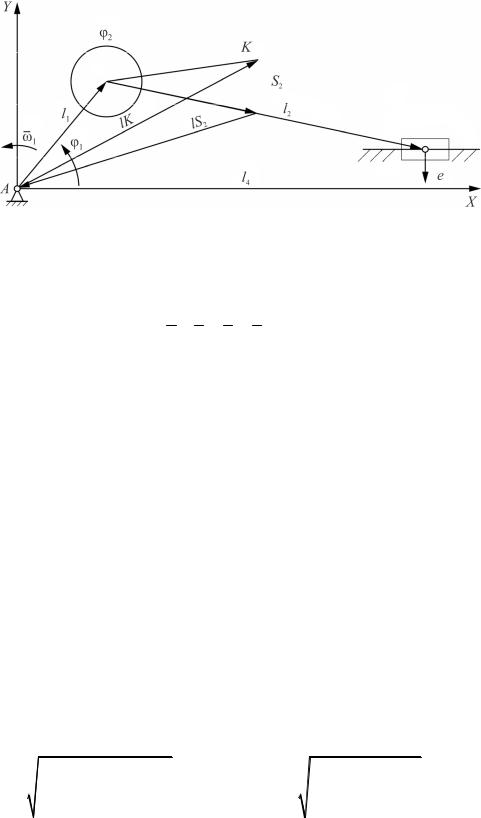
2.9.2. Кривошипно-ползунный механизм
Рассмотрим такой случай сборки механизма, когда при обходе по часовой стрелке сохраняется контур с последовательностью ABCDA (рис. 2.7).
Рис. 2.7. Схема кривошипно-ползунного механизма |
|
Задача о положениях |
|
Уравнение замкнутости векторного контура запишется в виде |
|
l1 + l2 + l3 + l4 = 0. |
(2.7) |
В проекциях на оси системы координат ХАY уравнение (2.7) представляется зависимостями
l |
cosϕ + l |
|
cosϕ |
|
= l |
|
, |
(2.8) |
1 |
1 |
2 |
|
2 |
|
4 |
|
|
l1 sin ϕ1 + l2 sin ϕ 2 = e, |
|
|
||||||
так как φ3 = 270°, φ4 = 180°. Из второго уравнения системы (2.8) определяется угол φ2, характеризующий положение шатуна:
sin ϕ2 |
= |
e − l1 sin ϕ1 |
= |
λe − sin ϕ1 |
, |
(2.9) |
|||
|
|
||||||||
|
|
l2 |
|
|
|
λ2 |
|
||
ϕ2 |
|
|
λ |
|
− sin ϕ |
|
(2.10) |
||
= arcsin |
|
e |
1 |
. |
|||||
|
|
|
|
|
λ2 |
|
|
||
Текущее положение ползуна (точка С) находится по формуле xC = l4 = l1 cosϕ1 + l2 cos ϕ 2 = l1 cosϕ1 + l2 ,
|
|
λ e |
− sin ϕ1 |
|
2 |
|
|
|
|
|
|
λ e |
− sin ϕ1 |
|
2 |
|
|
1− |
|
= l |
|
cosϕ + λ |
|
|
. |
(2.11) |
|||||||||
|
|
|
2 |
2 |
|
|
|
|
|
||||||||
|
|
λ 2 |
|
|
|
1 |
|
λ 2 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
53
Максимальный ход ползуна
H = l |
4 max |
− l |
= (l |
2 |
+ l )2 |
− e2 |
− (l + l2 )2 e2 |
= |
|
|
4 min |
|
|
1 |
|
2 |
|
||
|
= l ( (λ 2 |
+ 1)2 − λ1 |
− (λ 2 |
− 1)2 − λ2 ). |
|
||||
|
1 |
|
|
|
e |
|
|
e |
|
Текущее перемещение ползуна относительно одного из крайних положений, например, левого:
|
+ λ2 |
1 |
− |
(λ |
|
− sin ϕ )2 |
− |
(λ2 − 1) |
2 |
2 |
|
SC = xC − l4 min = l1 cosϕ1 |
|
e |
λ2 |
|
− λe |
. |
|||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача о скоростях
Используя результаты решения задачи о положениях, угловую скорость шатуна можно найти дифференцированием по времени (2.9):
|
|
d |
(sin ϕ |
) = cosϕ ω = − cosϕ1 |
ω ω = − |
|
cosϕ1 |
ω . |
|||||||||
|
|
|
|
|
|||||||||||||
|
|
dt |
2 |
|
2 |
2 |
|
λ2 |
1 |
|
2 |
|
cosϕ2λ2 |
1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Таким образом, |
|
|
|
|
|
ω2 = u21ω1, |
|
|
|
|
(2.12) |
||||||
где u21 = − |
cosϕ1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
λ2 cosϕ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Скорость ползуна |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
V |
|
= |
dSC |
= −l |
(ω sin ϕ + λ ω sin ϕ |
). |
(2.13) |
||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
C |
|
dt |
1 |
1 |
1 |
2 |
2 |
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Задача об ускорениях
Эта задача решается путем дифференцирования первых производных, полученных для определения скоростей:
ε |
|
= |
dω2 |
= − |
|
|
cosϕ1 |
|
(sin ϕ cosϕ |
|
ω − sin ϕ |
|
cosϕ ω ). |
(2.14) |
|||||||||||
|
|
|
|
λ2 cos2 ϕ2 |
|
|
|||||||||||||||||||
|
2 |
|
|
dt |
|
|
|
1 |
|
2 |
1 |
|
2 |
|
|
|
1 2 |
|
|||||||
a |
|
= |
dVC |
= l |
(cosϕ ω2 |
+ λ |
2 |
cosϕ ω2 |
+ ε sin ϕ + λ |
ε |
2 |
sin ϕ |
). |
(2.15) |
|||||||||||
|
|
||||||||||||||||||||||||
|
C |
|
|
dt |
1 |
1 |
1 |
|
2 |
2 |
1 |
1 |
|
2 |
|
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для определения положений центров масс звеньев (например точка S2 шатуна) и других точек звеньев (например точка K) записываем векторные уравнения:
54
l1 + lBS = lS2 , |
|
l1 + lBK = lk . |
(2.16) |
Впроекциях на оси координат перемещения этих точек в соответствии
ссоотношениями (2.16) будут следующими:
xC2 = l1 cosϕ1 +lBS cosϕ2 , |
|
xk = l1 cosϕ1 + lBK cos(ϕ2 + ϕk ), |
(2.17) |
yC2 = l1 sin ϕ1 + lBS sin ϕ2 , |
|
yk = l1 sin ϕ1 + lBK sin(ϕ2ϕk ). |
|
Дифференцируя соотношения (2.16), получим скорости точек S2 и K:
|
|
|
|
xS2 |
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
= −l sin ϕ1ω1 + λ BS2 |
sin ϕ2ω2 |
|
|
|
|||||||
|
|
|
xk |
|
|
|
|
|
|
|
|
|
|
|
(2.18) |
|
|
|
|
= −l ω1 sin ϕ1 |
|
+ λk ϕ2 sin ϕ2ωk , |
|
|
|||||||||
|
|
|
yS2 |
|
|
|
ϕ1 + λ BS2 |
|
|
, |
|
|
||||
|
|
|
= −l1 ω1 cos |
ϕ2 cosω2 |
|
|
||||||||||
|
|
|
|
yk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= −l1 ω1 cos |
ϕ1 + λk ϕ2 cosω2 . |
|
|
|
||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
xk2 |
|
|
2 |
2 |
|
ϕS2 |
= arccos |
xS2 |
|
|
2 |
2 |
|
|
||||
VS2 = |
xS2 |
+ yS2 |
, |
|
|
|
, Vk = |
xS2 |
+ yS2 |
, |
ϕVk = arccos |
|
, |
|||
VS2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Vk |
|||
где ϕS2 , ϕVk – направляющий угол вектора полной скорости относительно
оси АХ. Следует учесть, что φk – const. Аналогичным способом находятся ускорения точек S2 и K:
xS2 |
= −l1 ω12 cosϕ1 + λBS 2 ϕ22 cosω2 + ε1 sin ω1 |
+ ε2λBS2 |
sin ϕ2 , |
|
|
|
|
|||||||||
xk = −l ω12 cosϕ1 |
+ λk ϕ22 cos(ϕ2 + ϕk ) + ε1 sin ϕ1 + ε2λk sin(ϕ2 + ϕk ) , |
|
||||||||||||||
yS2 |
|
2 |
|
|
2 |
|
ϕ2 + ε1 cosω1 |
+ ε2λ BS2 |
|
|
|
|
|
|||
= l1 −ω1 |
sin ϕ1 + λBS2 ϕ2 sin |
cosϕ2 , |
|
|
|
|
||||||||||
|
|
|
+ λBS2 |
ϕ2 sin(ϕ2 + ϕk ) + ε1 cosϕ1 |
+ ε2λk cos(ϕ2 + ϕk ) |
|
, |
|||||||||
yk = l1 −ω1 sin ϕ1 |
|
|||||||||||||||
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
xk2 |
|
|
|
|
2 |
2 |
|
|
|
xS2 |
|
|
2 |
2 |
|
|
|
|
||
aS2 = |
xS2 + |
yS2 |
; |
ϕaS2 |
= arccos |
|
|
; ak = |
xk + |
yk ; ϕk = arccos |
|
|
. |
|
|
|
aS2 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ak |
|
|
||
55
П р и м е ч а н и е . В некоторых механизмах длина шатуна существенно больше длины кривошипа, т.е. λ2 < < 1. В этом случае для определения кинематических характеристик используют приближенные, более простые по сравнению с соотношениями (2.9)–(2.8) формулы, полученные на основе разложения радикалов в ряд по формуле бинома Ньютона.
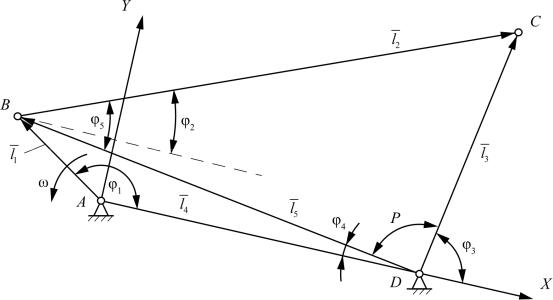
2.9.3. Шарнирный четырехзвенник
Кинематический анализ проводим для схемы механизма, представленной на рис. 2.8. Система координат выбирается так, чтобы ось АХ была направлена от точки 1 до D.
Рис. 2.8. Схема шарнирного четырехзвенника
Уравнение замкнутого векторного контура АВСD имеет вид
|
l |
1 + |
l |
2 + |
l |
3 + |
l |
4 . |
(2.19) |
В проекциях на оси координат это уравнение записывается следующим образом:
l1 cos ϕ1 + l2 cosϕ2 = l3 cosϕ3 + l4 , |
|
l1 cos ϕ1 + l2 cos ϕ2 = l3 cos ϕ3 , |
(2.20) |
так как φ3 = 0.
Соотношение (2.20) удобно использовать при решении задач о скоростях и ускорении. При определении же положения звеньев пользуются более удобными для решения на компьютере формулами.
56

Задача о положениях
Из треугольника АВD находится длина вспомогательного вектора l5.
l = |
l2 |
− 2l l |
cosϕ = l |
1+ λ2 |
− 2λ |
4 |
cosϕ . |
(2.21) |
|
5 |
1 |
1 4 |
1 |
1 |
4 |
|
1 |
|
|
Далее в соответствии с рис. 2.8 определяются дополнительные углы:
ϕ = arcsin |
|
yB |
|
= arcsin |
l1 |
|
sin ϕ1 |
|
|
|
= arcsin |
sin |
ϕ |
, |
|||
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
λ |
1 |
|||||||
|
l |
|
|
|
l |
5 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
5 |
|
|
|
5 |
|
|
|
|
|
|
|
|
|||
ϕ5 |
= arccos λ22 + λ52 + λ32 |
, |
|
|
(2.22) |
||||||||||||
|
|
|
|
|
|
2λ2λ2 |
|
|
|
|
|
|
|||||
|
p = arccos |
λ32 + λ52 + λ22 |
. |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
2λ3λ5 |
|
|
|
|
|
|
|||
Тогда значения углов поворотов звеньев ВС и CD с учетом рис. 2.8 определяются соотношениями
ϕ2 |
ϕ − ϕ |
при y |
|
≥ 0, |
= 5 |
|
B |
|
|
|
ϕ5 + ϕ |
при yB < 0, |
||
|
|
|
|
(2.23) |
ϕ3 |
π − ϕ |
при yB ≥ 0, |
||
= |
при yB < 0. |
|||
|
π + ϕ − p |
|||
Задача о скоростях
Дифференцируя уравнения (2.20), получаем систему уравнений, из которых находим угловые скорости ω2 и ω3.
|
− sin ϕ1ω3 = λ2ω2 sin ϕ2 − λ3ω3 sin ϕ3 , |
|
|||||||||
|
cos ϕ1ω3 = −λ2ω2 cos ϕ2 + λ3ω3 cos ϕ3 , |
(2.24) |
|||||||||
|
ω2 = − |
|
sin(ϕ1 − ϕ3 ) |
ω1 |
или ω2 = u21ω1, |
(2.25) |
|||||
|
λ |
2 |
sin(ϕ |
2 |
− ϕ ) |
||||||
|
|
|
|
|
3 |
|
|
|
|
||
где u21 = − |
sin(ϕ1 − ϕ3 ) |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
λ2 sin(ϕ2 − ϕ3 ) |
|
|
|
|
|
|
|
|
|
||
|
ω3 = − |
|
sin(ϕ1 − ϕ2 ) |
ω1 |
или ω3 = u31ω1, |
|
|||||
|
λ |
3 |
sin(ϕ |
2 |
− ϕ ) |
|
|
||||
|
|
|
|
|
3 |
|
|
|
|
||
57
где u31 = − |
|
sin(ϕ1 − ϕ3 ) |
||||
|
|
|
|
|
. |
|
λ |
3 |
sin(ϕ |
2 |
− ϕ ) |
||
|
|
|
3 |
|
||
Линейные скорости точек:
xB = −l1ω1 sin ϕ1, yB = l1ω1 cos ϕ1,
VB = l1ω1,
xC = xB − l1λ2ω2 sin ϕ2 , yC = yB + l1λ2ω2 cos ϕ2 , VC = l1λ Bω3.
Задача об ускорениях
Продифференцировав выражение (2.24) для проекции скоростей, получаем уравнение для определения угловых скоростей ε2 и ε3:
− cosϕ1ω12 − sinϕ1ε1 = λ2 cosϕ2ω22 + λ2ε2 sinϕ2 − λ3 cosϕ3ω32 − λ3ε3 sinϕ3,
−sinϕ1ω12 + cosϕ1ε1 = λ2 sinϕ2ω22 + λ2ε2 cosϕ2 − λ3 sinϕ3ω32 − λ3ε3 cosϕ3,
ε2 = u21ε1 + |
|
|
ω1 |
|
|
× |
λ |
2 |
sin2 (ϕ |
2 |
− ϕ ) |
||
|
|
|
3 |
|
×[cos(ϕ1 − ϕ3 )sin(ϕ2 − ϕ3 )(ω1 − ω3 ) − cos(ϕ2 − ϕ3 ) sin(ϕ1 − ϕ3 )(ω2 − ω3 )],
|
|
ε3 = u31ε1 + |
|
ω1 |
|
× |
|
|
λ |
sin2 (ϕ − ϕ ) |
|||
|
|
3 |
2 |
3 |
|
|
|
− ϕ2 ) sin(ϕ2 |
− ϕ3 )(ω1 − ω2 ) |
|
|
|
|
× cos(ϕ1 |
− cos(ϕ2 − ϕ3 ) sin(ϕ1 − ϕ3 )(ω2 − ω3 ) . |
|||||
Линейное ускорение точек будет следующим:
xB = −l1ω12 cosϕ1 − l1ε1 sin ϕ1,yB = −l1ω12 sin ϕ1 + l1ε1 cosϕ1,
aB = l1ω14 + ε12 ,
xC = xB − l1λ2 (ω22 cosϕ2 − ε2 sin ϕ2 ),yC = yB − l1λ2 (ω22 sin ϕ 2 −ε2 cosϕ2 ),
58
a = l λ |
3 |
ω4 |
+ ω3 . |
1 |
3 |
3 |
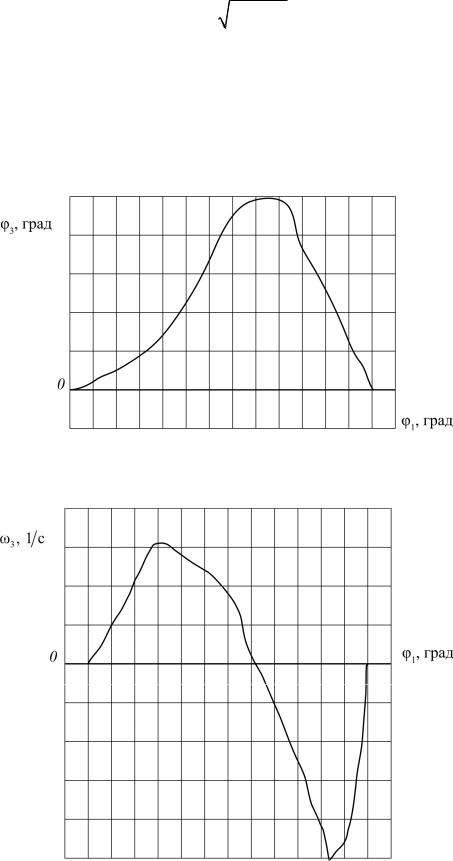
Значения кинематических характеристик центров масс звеньев и других точек звеньев определяются по методике, аналогичной методике использования кривошипно-ползунного механизма. Фрагмент результатов расчетов на компьютере кинематики шарнирного четырехзвенника представлен на рис. 2.9–2.12.
Рис. 2.9. Угловое перемещение коромысла
Рис. 2.10. Изменение угловой скорости коромысла
59
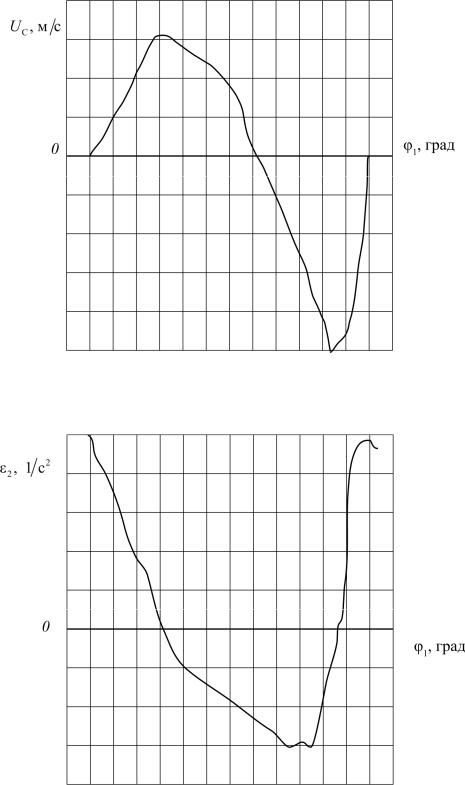
Рис. 2.11. Изменение скорости точки С
Рис. 2.12. Изменение углового ускорения коромысла
60