

2760.Практикум по теории механизмов и механике систем машин
..pdfR34 = μ p (ac).
3. Реакция во внутренней кинематической паре определяется из условия равновесия звена 5:
n
F = R45 + G5 + Fи5 + F пс + R05 = 0. (3.17)
i−1
Реакция R45 неизвестна ни по величине, ни по направлению.
Так как при построении плана сил для структурной группы 222 были сгруппированы силы по звеньям, то нового плана сил для звена 5 строить не требуется. Достаточно соединить конец силы R05 (точка а) с началом силы G5 (точка m), чтобы получить реакцию R45.
R45 = μ F (am).
Для равновесия звена 4 надо замкнуть многоугольник сил, действующих на звено 4, т.е. соединить конец вектора Fи4 (точка m) с началом векто-
n
ра R34 (точка а).
Иными словами, R45 = – R54 .
3.2.3. Определение реакций в кинематических парах структурной группы 2
Рассмотрев диаду 4–5, переходим к следующей структурной группе 2-го класса 1-го вида, состоящей из звеньев 2 и 3 (рис. 3.6). При этом определенную
нами реакцию R34 поворачиваем на |
|
180°, получаем реакцию R43 и прикла- |
|
дываем ее в точке Е звена 3 как извест- |
|
ную внешнюю силу. |
|
Порядок определения реакций в ки- |
|
нематических парах структурной груп- |
|
пы 222 указан в табл. 3.2, а соответст- |
|
вующие планы сил даны на рис. 3.7. |
|
1. Сумма моментов всех сил, дей- |
Рис. 3.6. Структурная группа 212 |
ствующих на звено 2, относительно |
|
точки С: |
|
81
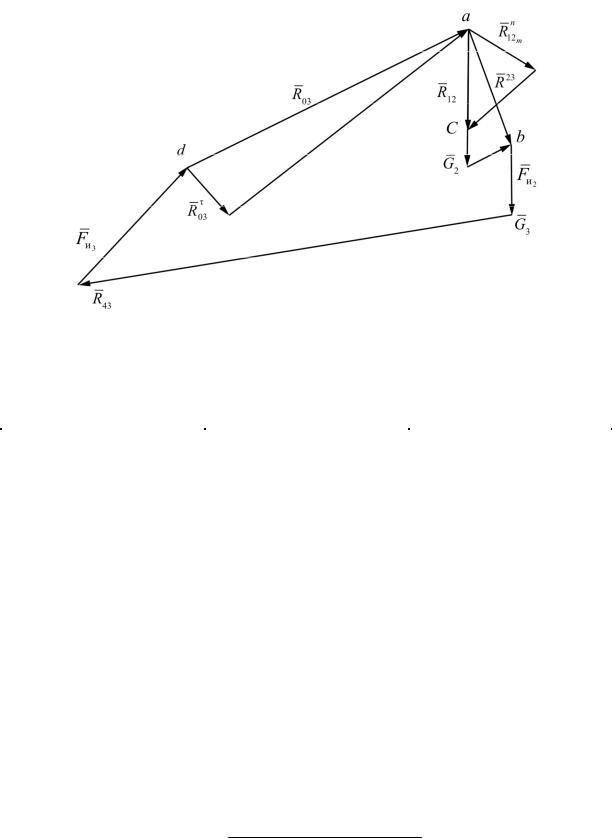
Рис. 3.7. План сил структурной группы 212
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3 . 2 |
Данные для определения реакций в кинематических парах |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Искомый параметр |
|
Уравнение |
|
|
|
|
Звено, для которого |
||||||||||||||||
|
равновесия |
|
|
|
составляется уравнение |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12τ |
|
|
|
|
|
|
|
C (F ) = 0 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
M |
|
|
|
2 |
|||||||||||
R |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
03τ |
|
|
|
|
|
|
|
C (F ) = 0 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
M |
|
|
|
3 |
|||||||||||
R |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C = 0 |
|
|
|
|
|
|
||||||||
R12n и |
|
03n |
|
|
|
F |
|
|
|
|
|
2 и 3 |
|||||||||||
R |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i−1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
32τ |
|
|
|
|
|
|
C = 0 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
2 |
||||||||
R |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
i−1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
n |
|
|
(F) = Rτ |
(BC)μ |
|
+ G h′μ |
|
− F h′′μ |
|
− M |
= 0, |
||||||
|
|
|
|
|
|
M |
C |
l |
l |
l |
|||||||||||||
|
|
|
|
|
|
12 |
|
2 2 |
и2 2 |
|
и2 |
||||||||||||
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
откуда
R12τ = Fи2 h ''2 μl − G2h ''2 μl + Mи .
LBC
2. Сумма моментов всех сил, действующих на звено 3 относительно точки С:
82
|
|
|
|
|
|
|
|
n |
|
|
|
|
= |
Rτ (ВС)μ |
|
+ G h′μ |
|
|
− F h′′ − M |
|
|
= 0, |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
M |
C |
l |
l |
|
и2 |
|
|
(3.18) |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
03 |
|
|
|
|
|
2 2 |
|
|
|
|
и2 2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Rτ |
= |
−G3h'3 μl |
− Fи3 h'''3 μl |
+ R43h''3 μl |
− Mи3 |
. |
|
|
|
(3.19) |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LDC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
3. Общее уравнение равновесия всей структурной группы (см. рис. 3.6): |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
n |
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
F = R12 + R12 + G2 + F и2 |
+ G3 + R43 + F и3 + R 03 + R03 |
(3.20) |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Построение начинаем в точке а, в которой заканчивается вектор R12 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
и из которой исходит R12 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Очевидно, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
(3.21) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R12 = R12 |
+ R12 , |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
(3.22) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R03 = R03 |
+ R03. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Отрезок |
|
|
|
|
|
на плане сил (см. рис. 3.7) в масштабе μF |
изображает ре- |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
ad |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
акцию |
|
03; отрезок |
|
|
|
|
– реакцию |
|
12 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
R |
|
ac |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R03 = μp (ad ),
R12 = μp (ac) .
4. Для определения силы R32 составляем уравнение равновесия звена 2:
n |
|
||||||||||||||
|
|
= |
|
|
12 + |
|
2 + |
|
и2 + |
|
32 = 0. |
|
|
|
|
F |
R |
G |
F |
R |
(3.23) |
||||||||||
i=1 |
|
||||||||||||||
Соединив конец вектора |
|
и2 (точка b) с началом вектора |
|
12 |
(точка a), |
||||||||||
F |
R |
||||||||||||||
получим в масштабе μF величину силы R32 и ее направление (см. рис. 3.7). R32 = μp (ab); R23 = −R32 и может быть найдена из уравнения равнове-
сия звена 3.
83
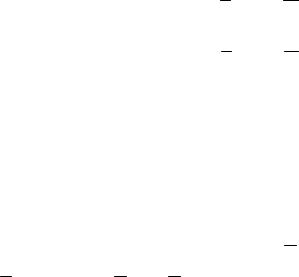
3.3. Силовой расчет ведущего звена
Определив последовательно реакции во всех структурных группах Ассура, переходим к рассмотрению равновесия кривошипа и определяем
реакцию стойки R01 и уравновешивающий момент M y (рис. 3.8). При этом реакция со стороны второго звена
R21 нами уже определена и включена в число из-
вестных сил: R21
Величина уравновешивающего момента определится из уравнения моментов всех сил относительно точки А:
n |
|
|
|
|
||||||
M A = M y + G1h'1 μl |
− R21h'1 μl = 0. |
(3.24) |
||||||||
i=1 |
|
|
|
|
||||||
Отсюда получаем значение уравновешиваю- |
||||||||||
щего момента, Нм: |
|
|
|
|
||||||
M y = −G1h1μl |
+ R21h1μ1. |
(3.25) |
||||||||
Реакция стойки на звено 1 определяется из |
||||||||||
условия равновесия звена 1: |
|
|
|
|
||||||
|
|
+ |
|
+ |
|
+ |
|
= 0. |
(3.26) Рис. 3.8. Первоначальный |
|
|
R21 |
Fи1 |
G1 |
R01 |
||||||
|
|
|
|
|
|
|
|
|||
механизм (входное звено)
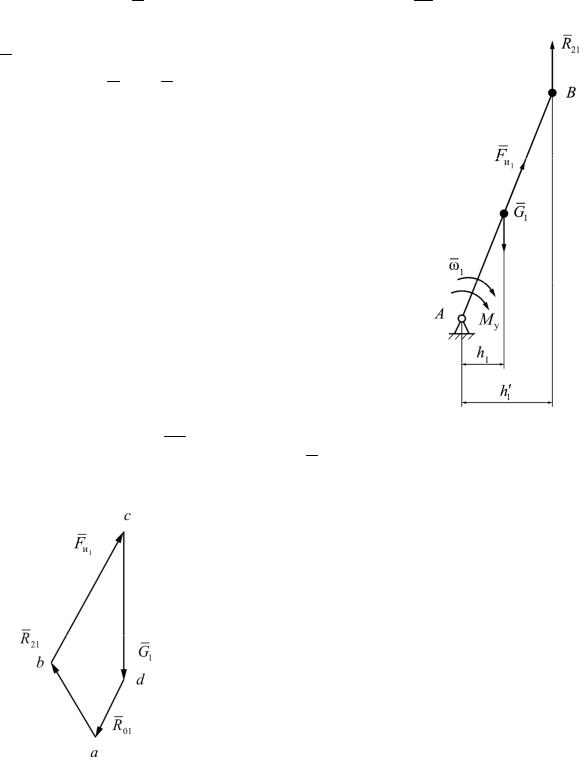
Графическое определение силы R01 , Н, показано на рис. 3.9.
Рис. 3.9. План сил ведущего звена
R01 = adμF .
3.4. Определение уравновешивающего момента с помощью рычага Жуковского
Уравновешивающий момент M у можно оп-
ределить с помощью рычага Жуковского.
Для этого надо план скоростей рассматриваемого положения механизма повернуть на 90° в любую сторону (в нашем примере план скоростей повернут по направлению вращения часовой стрелки) и все внешние силы, включая и силу
84
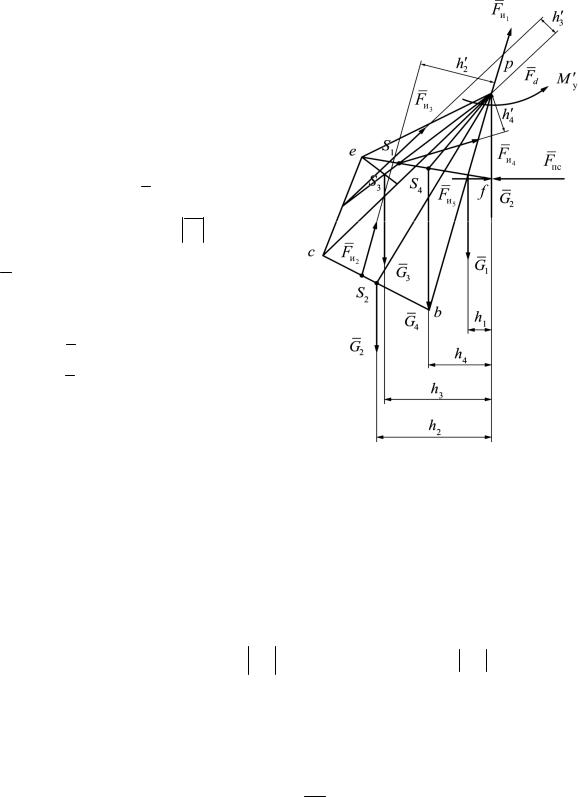
инерции звеньев, перенести параллельно самим себе в соответствующие точки плана (рис. 3.10).
Повернутый план скоростей рассматривается как жесткий рычаг с опорой в полюсе, который уравнове-
|
|
′ |
. Здесь |
|
|
|
– |
шивается моментом М |
М′ |
||||||
|
|
y |
|
|
|
y |
|
момент, приложенный на плане скоро-
стей. Знак момента М′ сохраняется, ес-
y
ли направление отрезка pb – порядок букв – совпадает с направлением отрез-
ка RAB , и будет противоположным, если эти направления не совпадают.
В рассматриваемом примере знак
момента М′ противоположен знаку
y
|
′ . |
|
момента |
Мy |
Составляем уравнение |
моментов всех сил относительно полюса р плана скоростей. Получаем:
Мy = − |
1 1μl |
− 2 2μl |
+ |
и2 2μl |
− 3 3μl + |
||||||
′ |
G h |
G h |
|
F h′ |
|
G h |
|
||||
+ F h′μ |
l |
− G h μ |
l |
− (F |
− F |
)(ρf )μ |
H. |
||||
и3 |
3 |
|
4 4 |
|
и5 |
пс |
|
l |
|
||
Рис. 3.10. Определение уравновешивающего момента с помощью рычага Жуковского
Если знак момента получится отрицательный, то направление действия момента следует сменить на обратное.
3.5. Определение потребной мощности двигателя
Сумма полезной мощности Ny и мощности трения NT дает минимальное потребное значение мощности привода механизма:
Nпривода ≥ Ny + NT
или
Nпривода ≥ Ny ,
η
где η – коэффициент полезного действия механизма.
На практике для определения мощности привода находят значения Ny и NT для нескольких положений механизма. Строят графики зависимости
85
Nпривода = N (t)
или
Nпривода = N (ϕ) ,
где ϕ – угол поворота ведущего звена, и выбирают оптимальное значение потребной мощности привода.
Порядок выполнения работы
Задание 1
1.Проанализировать кинематическую схему плоского рычажного механизма.
2.Определить значения и направления внешних и теоретических силовых факторов, действующих на звенья механизма, т.е. сил тяжести, сил инерции и моментов пар сил инерции.
3.Составить расчетную модель (схему), установив для механизма квазистатическое равновесие.
4.Используя кинетостатический метод обеспечения эквивалентности динамической модели, построить динамическую модель механизма, пригодную для выполнения силового анализа.
5.Построить повернутый план скоростей.
6.Используя теорему В.И. Жуковского, определить значение уравновешивающей силы или уравновешивающего момента.
7.Рассчитать величину уравновешивающего момента пары сил.
Задание 2
1.Проанализировать кинематическую схему плоского рычажного механизма.
2.Определить значения и направления внешних силовых факторов, действующих на звенья механизма, т.е. сил тяжести.
3.Составить расчетную модель (схему) механизма.
4.Используя энергетический метод обеспечения эквивалентности динамической модели, построить динамическую модель, пригодную для выполнения динамического анализа механизма.
5.Построить повернутый план скоростей.
6.Используя теорему В.И. Жуковского, рассчитать значение приведенной силы.
7.Определить величину приведенного момента пары внешних сил.
8.Вычислить значение постоянной части приведенной массы.
86
9.Вывести уравнение для расчета переменной части приведенной массы и определить ее значение.
10.Найти величины приведенного момента инерции и приведенной массы механизма.
Задание 3
Сравнить динамические модели, полученные по результатам выполнения заданий 1 и 2, и сделать соответствующий вывод.
После выполнения всех пунктов задания лабораторной работы необходимо оформить отчет в соответствии с предъявляемыми требованиями и подготовиться к ее защите.
Контрольные вопросы
1.Поясните цели и задачи раздела «Динамика». Какие основные динамические параметры механизмов вы знаете?
2.Какие виды анализа механизмов раздела «Динамика» вам известны?
3.Дайте определение понятия «динамическая модель». Какие методы обеспечения эквивалентности динамических моделей механизмов вы знаете?
4.Поясните принцип построения динамической модели, пригодной для выполнения силового анализа.
5.Дайте определения понятий «уравновешивающая сила» и «уравновешивающий момент пары сил».
6.Какие параметры динамической модели, пригодной для выполнения силового анализа, вам известны?
7.Поясните принцип построения динамической модели, пригодной для выполнения динамического анализа.
8.Дайте определения понятий «приведенная сила» и «приведенный момент пары сил».
9.Дайте определения понятий «приведенная масса» и «приведенный момент инерции».
10.Какие параметры динамической модели, пригодной для выполнения динамического анализа, вам известны?
11.Запишите выражение для определения суммы мгновенных мощностей, развиваемых приводимыми силами, и поясните все составляющие этого выражения.
12.Представьте равенство для определения суммы кинетических энергий, развиваемых приводимыми силами, и поясните все составляющие этого равенства.
87
13.Чем отличаются динамическая модель механизма для выполнения силового анализа и динамическая модель механизма для выполнения динамического анализа?
14.Приведите классификацию силовых факторов, действующих на звенья механизмов.
15.Дайте определение внешних силовых факторов, действующих на звенья механизмов, и поясните, как определить их значения.
16.Дайте определение внутренних силовых факторов и поясните, как найти их значения и направления действия.
17.Дайте определение теоретических силовых факторов и поясните, как вычислить их значения и направления действия.
18.Поясните формулировку принципа Даламбера и область его использования.
19.Дайте определение теоремы Н.Е. Жуковского и поясните область ее применения.
20.Какие режимы движения технической системы вы знаете?
21.Поясните суть метода приведения.
88

ПРАКТИЧЕСКОЕ ЗАНЯТИЕ 4. ОСНОВНЫЕ ПОНЯТИЯ ДИНАМИКИ И РЕЖИМОВ ДВИЖЕНИЯ МЕХАНИЗМОВ. РАСЧЕТ МАХОВИКА
Цель работы
Рассмотреть динамику машинного агрегата. Используя данные для динамического анализа, определить момент инерции маховика.
4.1. Уравнения движения механизма
Одна из основных задач динамики машин – изучение истинного закона движения ведущего звена под действием приложенных сил (моментов). Движение ведущего (главного) вала определяет движение остальных звеньев механизма.
Выполнив приведение сил и масс, любой механизм с одной степенью свободы (рычажный, зубчатый, кулачковый и др.), сколь бы сложным он ни был, можно заменить его динамической моделью. Эта модель в общем случае имеет переменный приведенный момент инерции JΣ , и к ней приложен
суммарный приведенный момент MΣ*. Закон движения модели такой же, как
и закон движения начального механизма.
Основой для составления уравнения движения механизма с одной степенью свободы служит теорема об изменении кинетической энергии:
T − Tнач = ∑ A.
Работу совершают все активные силы и моменты и силы трения во всех кинематических парах механизма.
Составим уравнение движения в энергетической форме. Запишем формулу для кинетической энергии модели, учитывая уравнение
T = J ω2 .
M 2
Так как вся нагрузка, приложенная к модели, выражается суммарным моментом MΣ, то сумма работ равна
φ
A = M dφ.
φHa4
89

Переменную интегрирования φM заменяется M координатой φ началь-
ного звена, так как φM = φ1. |
|
|
|
|
|
|||
Трансформируя основное уравнение, |
получим уравнение движения |
|||||||
в энергетической форме: |
|
|
|
|
|
|
|
|
|
J |
|
ω2 |
|
J Ha |
ω2Ha |
|
φ |
|
|
1 |
− |
4 |
4 |
= |
M dφ1 , |
|
|
|
2 |
2 |
|||||
|
|
|
φHa4 |
|||||
|
|
|
|
|
|
|
||
где искомой величиной является скорость ω1 начального звена механизма. В общем случае верхний предел φ интегрирования в уравнении счита-
ется переменным.
Если вся нагрузка, приложенная к механизму, зависит только от его положения, то и суммарный приведенный момент M есть функция только
координаты φ1 . В этом случае уравнение решается непосредственно относительно искомой величины ω:
|
|
φ |
|
(φ)dφ |
|
|
|
|
|
2 |
|
M |
J |
ω2 |
|||||
ω= |
|
φHa4 |
|
|
+ |
|
Ha4 |
Ha4 |
. |
|
|
J |
|
|
J |
|
|||
|
|
|
|
|
|
|
|
||
Укажем, что интеграл под корнем имеет знак, который надо учитывать.
Уравнение движения в дифференциальной форме. Продифференци-
руем уравнение по координате φ:
d |
|
J ω2 |
= M . |
|
|
|
|
|
|
|
2 |
|||
dφ |
|
|
||
Определим производную, стоящую в левой части уравнения, помня, что в общем случае переменной величиной является не только угловая скорость ω, но и J .
Поэтому
d |
|
J ω2 |
= J ω |
dω |
+ |
ω2 |
dJ |
= J |
dω |
+ |
1 dJ |
2 |
|
||
|
|
|
|
|
|
|
|
|
|
ω |
, |
||||
|
2 |
dφ |
2 dφ |
dt |
2 dφ |
||||||||||
dφ |
|
|
|
|
|
|
|
||||||||
откуда
J dω + 1 dJ ω2 = M . dt 2 dφ
90