

2760.Практикум по теории механизмов и механике систем машин
..pdfПри построении графика dS dϕ = f (ϕ) (см. рис. 6.8, б) на оси dS
dϕ = f (ϕ) (см. рис. 6.8, б) на оси dS dϕ откладываем отрезок 2h
dϕ откладываем отрезок 2h ϕуд и на нем, как на диаметре, строим полуокруж-
ϕуд и на нем, как на диаметре, строим полуокруж-
ность, которую делим на шесть равных частей. Точки деления нумеруем от начала координат. Через эти точки проводим прямые, параллельные оси φуд, до пересечения с соответствующими ординатами. Точки пересечения дают точки графика. Для фазы сближения график строится аналогично, только полуокружность расположена ниже первой и диаметр ее 2h ϕn .
ϕn .
График d 2S dϕ2 = f (ϕ) (см. рис. 6.8, в) строится как синусоида с ампли-
dϕ2 = f (ϕ) (см. рис. 6.8, в) строится как синусоида с ампли-
|
r |
|
2 h |
2 |
|
r′ |
|
2 h |
2 |
. |
тудой |
2 |
= |
π |
ϕуд |
для удаления и с амплитудой |
2 |
= |
π |
ϕсб |
для сближения |
Все дальнейшее построение напоминает построение для предыдущего закона.
6.4.4. Построение графиков зависимостей dS/dφ = f (φ) и S = f (φ) при заданном законе изменения ускорения
Чтобы построить графики зависимости S = f (ϕ) и dS dϕ = f (ϕ), если задан закон изменения d 2S
dϕ = f (ϕ), если задан закон изменения d 2S dϕ2 = f (ϕ), можно, как и прежде, воспользо-
dϕ2 = f (ϕ), можно, как и прежде, воспользо-
ваться аналитическими зависимостями, помещенными в табл. 6.1.
Эти графики можно построить и другим способом: двукратным графическим интегрированием заданного графика d 2S dϕ2 = f (ϕ).
dϕ2 = f (ϕ).
В этом случае для лучшего использования листа следует задаваться высотой графика d 2S dϕ2 = f (ϕ) , равной 50–70 мм.
dϕ2 = f (ϕ) , равной 50–70 мм.
При построении графика зависимости d 2S dϕ2 = f (ϕ) на фазе сближе-
dϕ2 = f (ϕ) на фазе сближе-
ния следует угол φсб разделить на столько же частей, на сколько разделен угол φуд, но нумерацию производить в обратном порядке (рис. 6.9, а).
Величины ординат графиков d 2S dϕ2 = f (ϕ) на фазе сближения мож-
dϕ2 = f (ϕ) на фазе сближения мож-
но определить путем пропорционального изменения ординат соответствующего графика на фазе удаления:
|
|
|
y2 = y1 |
ϕуд |
2 , |
|
|
|
|
||
|
|
|
ϕс |
||
где y1 – ордината графика d 2S |
dϕ2 = f (ϕ) на фазе удаления, y1 = d2S/dφ2уд; |
||||
y2 – ордината графика d 2S dϕ2 = f (ϕ) на фазе сближения, y2 = d2S/dφ2с. |
|||||
На рис. 6.9, а задан график зависимости d 2S dϕ2 = f (ϕ). Требуется |
|||||
построить графики |
dS |
= f (ϕ) |
и S = f (ϕ) . |
||
|
|||||
|
dϕ |
|
|
|
|
151
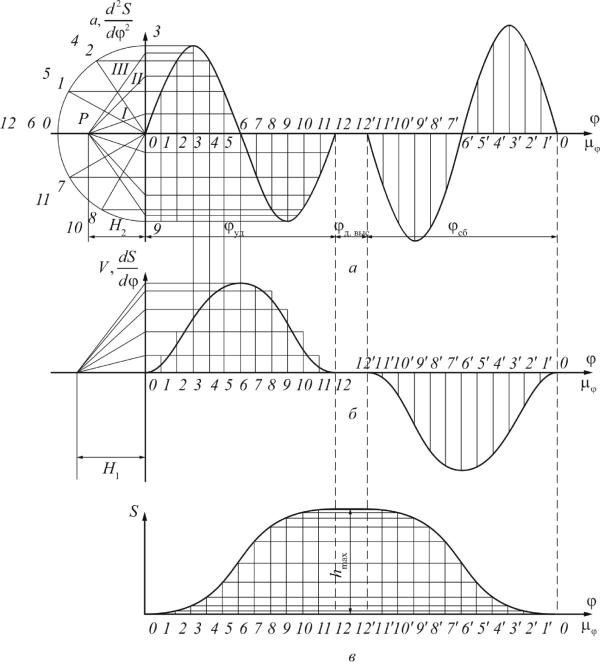
Рис. 6.9. Построение графиков зависимостей dS/dφ = f (φ) и S = f (φ):
а– график аналога ускорения; б – график аналога скорости;
в– график перемещения
152

Внутри каждого участка переменную величину d 2S dϕ2 заменим средним значением d 2S
dϕ2 заменим средним значением d 2S dϕ2 так, чтобы площади выступающих и входящих углов были одинаковы (см. рис. 6.8, a). Ординаты полученных средних ускорений отложим на ось d 2S
dϕ2 так, чтобы площади выступающих и входящих углов были одинаковы (см. рис. 6.8, a). Ординаты полученных средних ускорений отложим на ось d 2S dϕ2 и соединим лучами I, II, III, IV … с полюсом Р, взятым на расстоянии H2 от начала координат.
dϕ2 и соединим лучами I, II, III, IV … с полюсом Р, взятым на расстоянии H2 от начала координат.
|
Ниже |
системы |
осей |
|
|
|
d 2S |
; ϕ |
|
|
построим систему |
осей |
|
|
dS |
; ϕ |
|
|||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dϕ2 |
|
|
|
|
|
|
|
|
|
dϕ |
|
||
(см. рис. 6.9, б). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Из начала координат на соответствующих участках проводим отрезки, |
|||||||||||||||||||||||||
параллельные лучам I, II, III и т.д. Строим кривую линию. Затем строим по- |
||||||||||||||||||||||||||
луокружность, которая |
приближенно |
|
представляет |
искомый |
|
|
график |
|||||||||||||||||||
dS d ϕ = f |
(ϕ). Величину ординат графика dS dϕ = f (ϕ) на фазе сближе- |
|||||||||||||||||||||||||
ния можно определить путем пропорционального |
изменения |
ординат |
||||||||||||||||||||||||
dS dϕ на фазе удаления, |
не прибегая к графическому интегрированию, по |
|||||||||||||||||||||||||
зависимости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕуд |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 = y1 |
|
|
, |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕс |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где y2 – ордината графика |
dS dϕ = f (ϕ) |
|
на фазе сближения, y2 |
= dS/dφс; |
||||||||||||||||||||||
y1 – ордината графика dS |
dϕ = f (ϕ) на фазе удаления, y1 = dS/dφуд. |
|
|
|
|
|
||||||||||||||||||||
|
Максимальную высоту графиков dS |
dϕ = f (ϕ) и S = f (ϕ) рекоменду- |
||||||||||||||||||||||||
ется брать в пределах 60–100 мм. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
При графическом интегрировании это достигается за счет подбора ба- |
|||||||||||||||||||||||||
зы H1 и H2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Проинтегрировав график dS dϕ = f (ϕ), получим закон изменения пере- |
|||||||||||||||||||||||||
мещения ведомого звена от угла поворота кулачка S = f (ϕ) |
(см. рис. 6.9, в). |
|||||||||||||||||||||||||
Вычисление масштабов следует начинать с μS: |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
μS = |
hmax |
, |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
YSmax |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где hmax берется из исходных данных, |
YSmax – максимальная ордината пере- |
|||||||||||||||||||||||||
мещения толкателя на графике (измеряется на листе). |
|
|
|
|
|
|
|
|||||||||||||||||||
μ |
Определение масштабов μdS /dϕ , |
μd 2S /dϕ2 производится по формулам |
||||||||||||||||||||||||
|
= |
μ |
S ; μ 2 |
2 |
= |
μdS /d |
ϕ . |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
dS /dϕ |
|
|
|
d |
S /dϕ |
|
H2μϕ |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
H1μϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
153

6.5. Определение минимальных размеров кулачкового механизма
Эта задача сводится к определению наименьшего радиуса кулачка при заданных минимальном угле передачи движения ymin и законе движения. Определение минимального радиуса производится графически. Теоретическое обоснование метода можно найти в учебниках по теории механизмов и машин И.И. Артоболевского и др. Для решения задачи нужно построить графики перемещения и первой производной от перемещения по углу поворота. График второй производной d 2S dϕ2 необходим для динамического
dϕ2 необходим для динамического
анализа механизма. Графики S = f (ϕ) и dS dϕ = f (ϕ) имеют один масштаб.
dϕ = f (ϕ) имеют один масштаб.
Определение минимального радиуса кулачка рассмотрим на примерах. Для начала определим минимальный размер кулачкового механизма
с поступательно движущимся толкателем.
Для решения поставленной задачи должны быть заданы: закон движения ведомого звена, минимальный угол передачи, фазовые углы или циклограмма, максимальный ход толкателя γmin.
Вначале строим графики перемещений и первой производной перемещения по углу поворота. Если второй график dS dϕ = f (ϕ) строится гра-
dϕ = f (ϕ) строится гра-
фическим дифференцированием, то величину полюсного расстояния Н нужно вычислить исходя из условия равенства масштабов:
|
|
μS = μdS /dϕ , |
|
|
|
|
|
|
|
но μdS /dϕ = |
μS |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
μϕ H1 |
|
|
|
|
|
|
||
Решаем совместно оба этих уравнения: μS = |
μS |
, откуда H1 = |
|
1 |
. |
|
|
||
μϕ H1 |
|
||||||||
|
|
|
|
|
μϕ |
||||
В нашем примере (рис. 6.10) закон движения взят параболический; ми- |
|||||||||
нимальный угол передачи; заданы фазовые углы ϕуд, ϕд.выс, ϕс, γmin = 60°. |
|||||||||
Построение графиков S = f (ϕ) и dS dϕ = f (ϕ) |
производим методом |
||||||||
графического дифференцирования, причем графики |
S = f (ϕ) и |
dS dϕ = |
|||||||
= f (ϕ) строим в одном масштабе. Величина полюсного расстояния |
H1 = |
1 |
. |
||||||
|
|||||||||
|
|
|
|
|
|
|
|
μϕ |
|
График d 2S dϕ2 = f (ϕ) построен в другом масштабе (см. рис. 6.10, а). После построения вышеназванных графиков переходим к построению
dϕ2 = f (ϕ) построен в другом масштабе (см. рис. 6.10, а). После построения вышеназванных графиков переходим к построению
совмещенного графика S = f (dS dϕ) двумя способами.
dϕ) двумя способами.
154
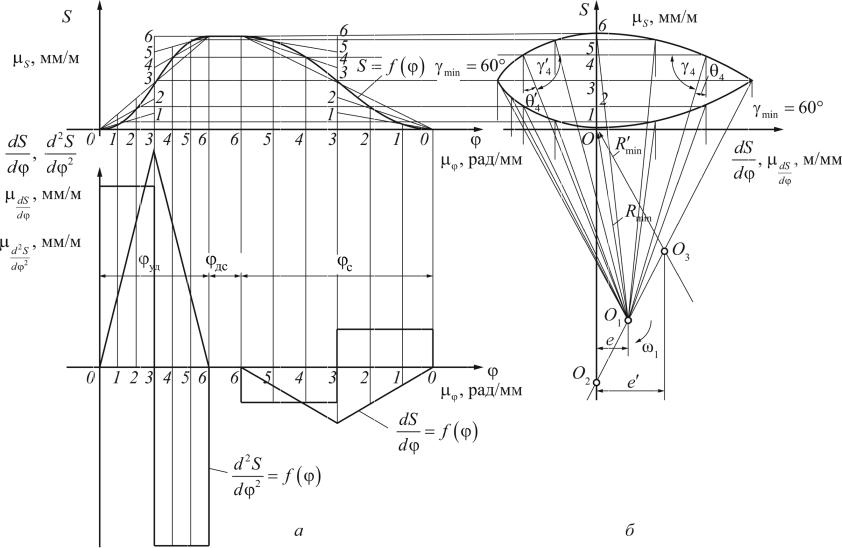
Рис. 6.10. Определение минимальных размеров кулачкового механизма:
а – диаграммы движения толкателя; б – совмещенный график зависимостей S = f(dS/d)
155

Первый способ показан на рис. 6.10, б. Ось поворота проведена под углом 45°. Суть построения заключается в исключении аргумента φ из функций S = f (ϕ) и dS dϕ = f (ϕ). Каждому углу поворота соответствует
dϕ = f (ϕ). Каждому углу поворота соответствует
ордината перемещения и ордината первой производной. Эти ординаты и являются в дальнейшем координатами совмещенного графика, причем по оси абсцисс х откладываются ординаты первой производной, а по оси y – перемещение.
Второй способ связан с вычислением отрезков S, dS  dϕ , по которым,
dϕ , по которым,
как по координатам, в дальнейшем строится совмещенный график. В нашем примере вычисленные отрезки приведены в табл. 6.2 в масштабе μS. Значения S и dS dϕ взяты в отрезках, которые в дальнейшем служат координатами
dϕ взяты в отрезках, которые в дальнейшем служат координатами
при построении графика. На фазе удаления имеем положительные значения dS dϕуд , а на фазе сближения – отрицательные значения dS
dϕуд , а на фазе сближения – отрицательные значения dS dϕc .
dϕc .
При построении совмещенного графика S = f (dS dϕ) по данным, при-
dϕ) по данным, при-
веденным в табл. 6.2, при вращении кулачка по часовой стрелке следует через соответствующие положения центра ролика 1, 2, 3, 4… и т.д. провести линии, перпендикулярные направлению его движения, и отложить вправо отрезки dS dϕуд для фазы удаления, а влево отрезки dS
dϕуд для фазы удаления, а влево отрезки dS dϕc для фазы сближения.
dϕc для фазы сближения.
Таблица 6 . 2 Амплитуды перемещения и аналога скорости толкателя
Номер |
S |
dS dϕ |
|
положения |
|||
|
|
||
0 |
0 |
0 |
|
1 |
1 |
20 |
|
2 |
5 |
41 |
|
3 |
12 |
61 |
|
4 |
22 |
83 |
|
5 |
32 |
61 |
|
6 |
38 |
41 |
|
7 |
42 |
20 |
|
8 |
44 |
0 |
|
9 |
44 |
0 |
|
10 |
43 |
–5 |
Номер |
S |
dS dϕ |
|
положения |
|||
|
|
||
11 |
41 |
–10 |
|
12 |
38 |
–15 |
|
13 |
34 |
–20 |
|
14 |
28 |
–25 |
|
15 |
22 |
–30 |
|
16 |
16 |
–25 |
|
17 |
10 |
–20 |
|
18 |
5 |
–15 |
|
19 |
2 |
–10 |
|
20 |
1 |
–5 |
|
21 |
0 |
0 |
При вращении кулачка против направления вращения часовой стрелки отрезки dS dϕуд на фазе удаления откладываются влево от соответствующих
dϕуд на фазе удаления откладываются влево от соответствующих
положений центра ролика, а отрезки dS dϕсб на фазе сближения – вправо. Если масштабы диаграммы перемещения и диаграммы dS
dϕсб на фазе сближения – вправо. Если масштабы диаграммы перемещения и диаграммы dS dϕ = f (ϕ) разные, то отрезки следует определить по формуле
dϕ = f (ϕ) разные, то отрезки следует определить по формуле
156

= YdS dϕμdS
dϕμdS dϕ , XdS
dϕ , XdS dϕ μS
dϕ μS
– ординаты величин dS dϕ .
dϕ .
Все точки совмещенного графика S = f (dS dϕ) соединяем плавной
dϕ) соединяем плавной
кривой. К полученной кривой проводим справа и слева касательные под углом γmin к оси dS dϕ и находим точку О1 их пересечения (см. рис. 6.10, б).
dϕ и находим точку О1 их пересечения (см. рис. 6.10, б).
Касательные после пересечения ограничивают область, в которой любая точка может быть принята за центр вращения кулачка. На рис. 6.10, б за центр вращения кулачка взята точка О1.
Если из выбранного центра вращения кулачка проведем прямую через любую точку совмещенного графика, то острый угол между этой прямой и горизонталью, проведенной через эту точку, дает угол передачи движения, который будет больше минимального угла передачи движения.
Таким образом, центр вращения выбран верно, и основное условие, чтобы угол передачи движения не был меньше допустимого, выполнено для каждой фазы движения.
Соединив точку О1 с началом координат О совмещенного графика (см. рис. 6.10, б), получим отрезок О1О, изображающий минимальный радиус кулачка Rmin в масштабе перемещения μS. Расстояние от выбранного центра вращения кулачка до оси перемещения называется эксцентриситетом е (смещением).
Кулачковый механизм со смещением имеет меньший Rmin, чем центральный механизм. В этом нетрудно убедиться, если сравнить отрезки О1О и О2О, изображающие Rmin в том и другом случае (см. рис. 6.10, б): О1О < О2О (отрезок О2О изображает Rmin для центрального кулачкового механизма). Следовательно, габариты в целом кулачкового механизма со смещением в данном случае будут меньше.
Если кулачок одностороннего вращения, то движение толкателя на фазе сближения совершается под действием пружины или собственного веса. Для этого периода работы угол передачи не имеет решающего значения, как при подъеме, поэтому может быть допущен угол, значительно меньший γmin.
В этом случае область, где можно расположить центр вращения кулачка, определяем следующим образом. Проводим касательную только к кривой S = f (dS dϕ) на фазе сближения. Затем проводим луч под углом γmin из начала координат на фазе удаления. Точка О3 пересечения касательной и луча определяет центр вращения кулачка одностороннего действия. На рис. 6.10, б расстояние ОО3 является Rmin' . Следовательно, центр враще-
dϕ) на фазе сближения. Затем проводим луч под углом γmin из начала координат на фазе удаления. Точка О3 пересечения касательной и луча определяет центр вращения кулачка одностороннего действия. На рис. 6.10, б расстояние ОО3 является Rmin' . Следовательно, центр враще-
157

ния кулачка можно выбрать в точке О3, что позволит уменьшить минимальный радиус, а следовательно, и габариты кулачкового механизма.
При этом необходимо выбирать точку О3 так, чтобы угол передачи был не менее γmin в пределах фазы удаления.
Некоторое уменьшение углов γ на фазе сближения при одностороннем вращении кулачка никак не отразится на работе кулачкового механизма.
Смещение e' толкателя в этом случае увеличилось. Следовательно, за счет соответствующего выбора смещения можно уменьшить размеры кулачковой шайбы.
6.6. Построение профиля кулачка
При построении профиля кулачка масштаб выбирают, принимая во внимание лишь свободное поле чертежа. Из произвольной точки О1 (рис. 6.11) проводят окружность радиусом е. К полученной окружности проводят касательную τ–τ, которая будет осью толкателя. Затем из точки О1 радиусом Rmin вычерчивают окружность, пересечение ее с касательной τ–τ дает нижнее положение конца толкателя. На оси движения толкателя от точки нижнего положения О откладывают вверх перемещения толкателя, взятые из графиков S = f (ϕ) для фазы удаления и сближения.
Рис. 6.11. Профилирование кулачка
158
Полученные точки отмечают цифрами, соответствующими повороту кулачка. Наиболее удаленную точку соединяют с осью вращения кулачка О1 и этим радиусом проводят окружность, на которой откладывают фазовые углы. Началом отсчета для фазовых углов служит радиус О1C, отсчет ведется против движения кулачка. Дуги окружности радиусом О1C, соответствующие фазовым углам удаления и сближения, делят на равное число частей (как на графике перемещения разделены фазовые углы).
Через точки деления проводят касательные к окружности радиусом е (см. рис. 6.11). Затем из центра вращения кулачка О1 проводят дуги радиусом О11; О12; О13 и т.д. до пересечения с соответствующими касательными. Точки пересечения дают положения конца толкателя в обращенном движении. Соединив эти точки плавной кривой, получим центровой профиль кулачка.
6.7. Определение размеров ролика толкателя
Для уменьшения износа профиля кулачка и потерь на трение толкатель снабжают роликом. Размер ролика r выбирают из условия выполнения закона движения (чтобы не получить заострение практического профиля кулачка): rp ≤ 0,8ρmin , где ρmin – минимальный радиус кривизны профиля
кулачка на выпуклой части, и из условия конструктивности: rp ≤ 0,4Rmin , где Rmin – минимальный радиус профиля кулачка.
Участки теоретического профиля кулачка с наименьшим ρmin определяют визуально. Затем для этих участков (или одного участка на рис. 6.11) находят центр среднего круга кривизны, проходящего через три близлежащие точки. Средний круг кривизны можно определить и с помощью хорд, соединяющих соседние точки со средней точкой. Через середины каждой из хорд проводят перпендикуляры и находят их пересечение. В точке их пересечения будет находиться центр кривизны. Окончательно радиус ролика берется меньший из двух, вычисленных по формулам
rp ≤ 0,8ρmin , rp ≤ 0,4Rmin .
Для вычерчивания практического профиля нужно провести ряд окружностей радиусом ролика с центрами на теоретическом профиле, и огибающая этих окружностей будет практическим профилем кулачка.
159
6.8. Определение минимальных размеров кулачка с коромыслом
Для решения этой задачи задаются: закон движения, минимальный угол передачи движения γmin , циклограмма или фазовые углы, длина коро-
мысла l и максимальный угол качания коромысла βmax .
Порядок расчета напоминает порядок расчета минимальных размеров кулачка с поступательно движущимся толкателем.
Вначале строят графики перемещения, первой и второй производной перемещения по углу поворота кулачка. Перемещение можно выразить в угловых единицах или в линейных, закон движения при этом не изменится, так как Smax = lβmax , где Smax – максимальный дуговой путь конца коромысла, l – дли-
на коромысла, величина постоянная; βmax – угол качания коромысла, рад.
Графики перемещения и первой производной перемещения по углу поворота кулачка строят в одинаковых масштабах. Метод построения остается прежним.
Строят совмещенный график. Для этого из произвольно взятой точки С (рис. 6.12) радиусом B0C = l / μl (μl – масштаб для определения параметров
кулачка) проводят дугу B0 D и соединяют точку B0 с точкой С.
Далее от точки B0 по этой дуге откладывают с графика перемещения
|
S′ |
l |
, |
|
l – |
, |
|
– |
|
- |
соответствующие отрезки |
2 = |
β2 |
|
где |
|
длина коромысла |
β2 |
|
угол кача |
|
ния коромысла. |
|
|
|
|
|
|
|
|
|
|
Полученные точки B0; 2; 3; 4 и т.д. представляют положения центра |
||||||||||
коромысла, соответствующие заданным углам поворота кулачка. |
|
|
||||||||
Для определения центра O1 вращения кулачка необходимо на лучах |
||||||||||
CB0, CB1, CB2 и т.д. отложить отрезки dS / dϕ в масштабе μS . |
При этом |
|||||||||
следует придерживаться следующего правила: при вращении кулачка и коромысла в одном направлении на фазе удаления отрезки dS / dϕуд отклады-
ваются по соответствующим лучам от дуги радиусом B0C в направлении C, а отрезки dS / dϕс на фазе сближения – в сторону, противоположную точке
С. При вращении кулачка и коромысла в противоположных направлениях
(см. рис. |
6.12) отрезки dS / dϕуд откладываются |
от дуги радиусом B0C |
в сторону, |
противоположную центру С вращения |
коромысла, а отрезки |
dS / dϕс – в сторону точки С.
В результате получают точки B0, B1 и т.д. Через эти точки проводят прямые под углом γmin к соответствующим лучам. Область, ограниченная этими прямыми (на рис. 6.12 она заштрихована), может рассматриваться как поле возможных центров вращения кулачка. Причем для любой точки
160