

2760.Практикум по теории механизмов и механике систем машин
..pdfпо углу поворота кривошипа, т.е. ТМ = f (φ), в том же масштабе, что и гра-
фик ∆Т = f (φ) (см. рис. 4.1, г).
5.Вычитая из ординат графика ∆Т = f (φ) соответствующие ординаты
графика Тзв = f (φ), построить кривую изменения кинетической энергии маховика (см. рис. 4.1, д).
6.По построенной кривой определить момент инерции маховика:
JM = |
μT (AB) |
. |
2 |
||
|
ω cpδ |
|
Таким образом, момент инерции маховика по методу Н.И. Мерцалова определяется по графику ТМ = f (φ).
4.7. Расчет момента инерции по методу Ф. Виттенбауэра (с помощью диаграммы энергомоментов)
Этот метод в отличие от метода Н.И. Мерцалова является принципиально точным, так как в нем не допускается никаких приближений, могущих вызвать ошибки при определении момента инерции маховика.
4.7.1. Диаграмма моментов Т = f (Jп)
Исследования многих вопросов движения машины удобно вести по так называемой диаграмме энергомоментов – диаграмме зависимости приращения кинетической энергии машины Т от ее приведенного момента инерции Jп. Эта зависимость для периодически неравномерно установившегося движения имеет вид замкнутой кривой, так как значения Т и Jп периодически повторяются (рис. 4.2).
Диаграмму Т = f (Jп) можно построить для каждой машины, если заданы силы, действующие на нее, массы и моменты инерции звеньев и начальная кинетическая энергия машины Т0.
Зависимость между кинетической энергией машины Т, ее приведенным моментом инерции Jп и угловой скоростью ω определяется выражением
Т = Jп2ω2 ,
откуда ω2 = 2Т . Используя данное выражение, по диаграмме Т = f (Jп) легко
Jп
определить скорость ведущего звена для любого положения механизма. Пусть заданному положению механизма соответствует точка В на кривой Т = f (Jп) с координатами х, у. Тогда для этого положения Т = μТу, Jп = μJп x .
101
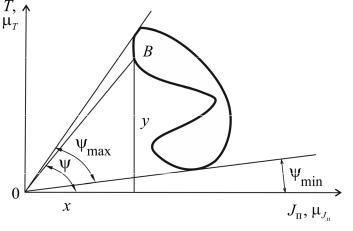
Рис. 4.2. Расчет момента инерции по методу Ф. Виттенбауэра
Подставляя значения Т и Jп, получим
ω2 = 2 |
μТ |
|
у |
= 2 |
μТ |
tgψ, |
μJП х |
|
|||||
|
|
μJП |
||||
т.е. квадрат угловой скорости ведущего звена прямо пропорционален тангенсу угла наклона луча, проведенного из начала координат в соответствующую точку диаграммы, к оси Jп. Проведем из начала координат к кривой Т = f (Jп) две касательные, охватывающие кривую (см. рис. 4.2). Очевидно, что нижняя касательная, составляющая с осью Jп минимальный угол ψmin , соответствует ωmin , а верхняя касательная, составляющая с осью Jп
угол ψmax , соответствует ωmax :
ω2min = 2 |
μТ |
tgψmin , |
ω2max = 2 |
μТ |
tgψmax . |
||
|
|
||||||
|
μJ |
п |
|
μJ |
п |
||
|
|
|
|
||||
Таким образом, построив диаграмму Т = f (Jп) и проведя через начало координат к кривой касательные, легко измерить углы ψmax и ψmin , вычислить ωmax и ωmin , а следовательно, и δ. При определении момента инерции маховика Jп необходиморешитьобратнуюзадачу– позаданнымδи ωср определитьJп.
4.7.2. Алгоритм расчета момента инерции маховика по методу Ф. Виттенбауэра
1.Для определения момента инерции маховика предварительно выполняются вычисления и построения, приведенные в пунктах 4.1–4.4.
2.По данным графика ∆Т = f (φ) и Jп = f (φ) путем графического исключения угла φ строится неполная диаграмма ∆Т = f (Jп). Она отличается
102
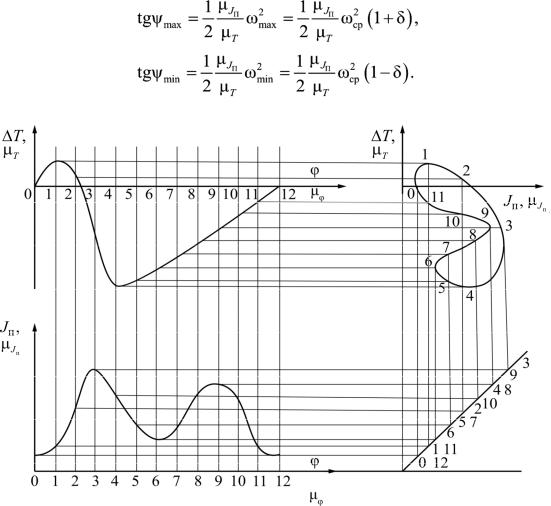
от полной диаграммы энергомоментов Т = f (Jп). Построение диаграммы ∆Т = f (φ) показано на рис. 4.3.
3.К кривой ∆Т = f (Jп) проводятся две касательные под углами
ψmax и ψmin , которые соответствуют ωmax и ωmin .
Рис. 4.3. Расчет маховика по методу Виттенбауэра
Точка пересечения этих касательных определит начало координат, в которых построенная кривая будет представлять графики зависимости полной кинетической энергии машины (рис. 4.4) Т = Т0 + ∆Т и полного приведенного момента, включая момент инерции маховика J = JM + Jп.
Определив начало координат полной диаграммы энергомасс Т = f (Jп), можно найти момент инерции маховика Jп и начальную кинетическую энергию Т0 так, как показано на рис. 4.4. Отрезок ОС в мас-
штабе μJ |
представляет собой искомый момент инерции маховика: |
|
|
|
п |
JМ = μJ |
(ОС). |
|
|
п |
|
103
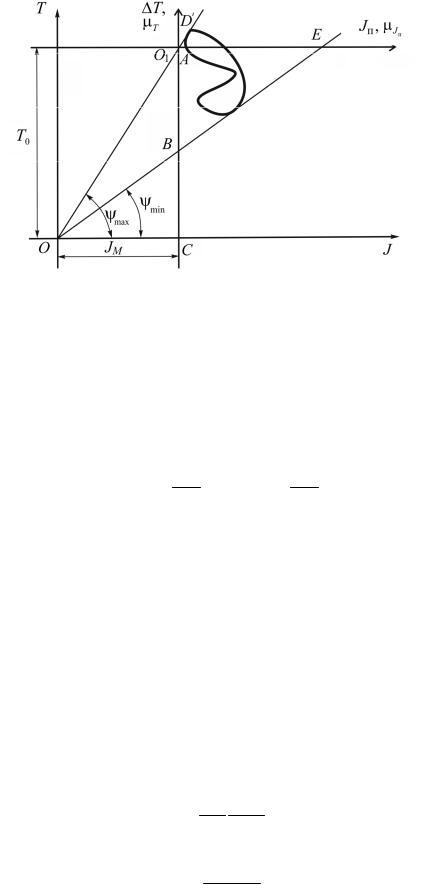
Рис. 4.4. Определение истинного закона движения ведущего звена
Погрешность расчета этим методом возникает при проведении касательных, так как углы ψmax и ψmin, особенно при малых δ, очень близки друг к другу, что затрудняет точное проведение касательных и определение положения начала координат точки О. Касательные в этом случае в пределах чертежа обычно не пересекаются. Тогда момент инерции маховика
tgψmax = AC , tgψmin = BC .
OC OC
Взяв разность тангенсов, получим
tgψmax − tgψmin = |
AC − BC |
= |
AB |
, |
|||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
OC |
|
|
OC |
|||
tgψmax − tgψmin = |
|
μJп |
|
ω2срδ, |
|||||||||
|
μТ |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
АВ |
|
μJ |
п |
|
2 |
|
|
|
|
|
||
|
|
= |
|
|
ω срδ |
|
|
|
|
||||
|
ОС |
|
|
|
|
|
|
|
|||||
|
|
μТ |
|
|
|
|
|
|
|
||||
или
ОС = μJп АВ2 ,
μJп ωсрδ
JM = AB2 μT .
ωсрδ
104

Иногда (при больших значениях углов ψmax и ψmin) касательные в пределах чертежа не пересекают ось ординат Т, но пересекают ось абсцисс в точках D и Е. Тогда, измерив отрезки О1D и О1Е, отрезок АВ можно вычис-
лить следующим образом. На рис. 4.4 О1А = О1Dtg ψmax, O1B = O1EDtgψmin,
откуда AB = O1B – O1A = O1Etgψmin – О1Dtgψmax.
4.8. Определение основных размеров маховика
После определения момента инерции маховика JМ переходят к выбору его основных размеров. Обычно маховик рассматривается как массивное кольцо среднего диаметра D, в котором сосредоточено примерно 0,9 массы маховика. При этом условии момент инерции маховика
= GD2 JM 4g ,
где G – вес маховика; D – средний диаметр обода маховика; g – ускорение силы тяжести.
Произведение GD2 называется маховым моментом и является основным параметром, характеризующим маховик.
Поскольку в выражение махового момента входят две неизвестные величины G и D, то одну из них задают, а другую находят. Обычно задают из конструктивных соображений диаметр маховика, а находят его вес.
Из соотношения GD2 = 4gJМ видно, что чем больше диаметр маховика, тем меньше его вес. Но злоупотреблять увеличением размеров для уменьшения веса маховика не рекомендуется, так как с увеличением диаметра возрастает окружная скорость, а следовательно, создается напряжение на ободе и может произойти его разрыв. Необходимо при выборе диаметра проверять окружную скорость на ободе, вычисляя ее по следующей формуле:
V |
= ω |
D |
= ω |
1+ |
δ |
D |
. |
|
|
|
|||||||
окр |
max |
2 |
cp |
2 |
|
2 |
|
|
|
|
|
|
|
|
|||
При этом можно руководствоваться следующими цифрами: Vокр ≤ 30 м/с для чугунных маховиков; Vокр ≥ 50 м/с для стальных маховиков. Выбрав диаметр маховика, определяют его теоретический вес:
G = 4JM .
D2
Обычно действительный вес обода
Gд = 0,9G.
105
Задачи для выполнения практической работы по проектированию зубчатой передачи
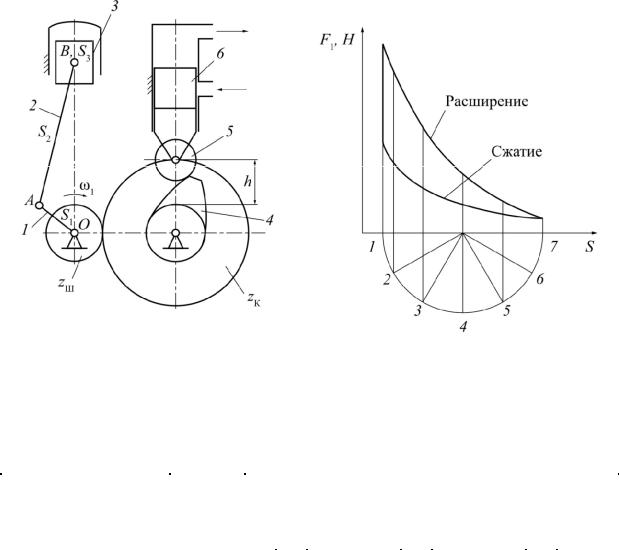
Задание 1. Двухтактный одноцилиндровый двигатель
Кинематическая схема: двухтактный двигатель содержит кривошипноползунный механизм, состоящий из звеньев 1–3, и кулачковый привод гидроклина, состоящий из звеньев 4–6. Кулачок получает вращение через зубчатые колеса zш и zк.
|
Параметры |
Обозна- |
|
|
|
|
|
Вариант |
|
|
|
|
|
||
|
кривошипно-ползунного |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
чение |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
||
|
механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частота вращения, с–1 |
ω1 |
|
250 |
300 |
350 |
400 |
650 |
450 |
500 |
550 |
600 |
650 |
400 |
450 |
|
Длина кривошипа, м |
l1·10–1 |
1,5 |
1,6 |
1,8 |
2 |
2,4 |
2,6 |
2,8 |
3 |
2,2 |
2,5 |
2 |
2,2 |
|
|
Длина шатуна, м |
l2·10–1 |
7,5 |
7,6 |
7,8 |
8 |
8,2 |
8,4 |
8,6 |
8,8 |
9 |
8 |
8 |
7 |
|
|
Координатыцентра масс |
l3·10–1 |
0,7 |
0,8 |
1 |
1,5 |
1,6 |
1,7 |
1,4 |
1,5 |
1,2 |
1,4 |
1 |
1,2 |
|
|
кривошипа, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Координатыцентра масс |
l4·10–1 |
3,2 |
3,4 |
3,6 |
3,8 |
4 |
4,2 |
4 |
4,2 |
1,4 |
4 |
4 |
3,8 |
|
|
шатуна, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Масса кривошипа, кг |
m1·10–1 |
5,2 |
5,4 |
5,6 |
5,8 |
6 |
6,2 |
6,4 |
6,6 |
6,8 |
6 |
5 |
7 |
|
|
Масса шатуна, кг |
m2·10–1 |
7,2 |
7,4 |
7,6 |
7,8 |
8 |
8,3 |
8,4 |
8,6 |
8,8 |
8,5 |
7 |
8 |
|
|
Масса поршня, кг |
m3·10–1 |
15 |
15 |
14 |
16 |
16,5 |
17 |
17,5 |
18 |
18,5 |
18,8 |
18 |
14 |
|
|
Момент инерции |
J0·10 |
–5 |
7,5 |
7,4 |
7,6 |
7,8 |
8 |
8,2 |
8,4 |
8,6 |
8,8 |
8,5 |
8 |
8,2 |
|
кривошипа, кгм2 |
|
|||||||||||||
|
Момент инерции шатуна, |
J ·10–4 |
1,2 |
1 |
0,9 |
1 |
1,1 |
1,2 |
1,3 |
1,4 |
1,5 |
1,6 |
1,4 |
1,6 |
|
|
кгм |
s2 |
|
||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Неравномерностьхода |
δ·10–1 |
0,4 |
0,3 |
0,4 |
0,5 |
0,4 |
0,3 |
0,4 |
0,3 |
0,4 |
0,5 |
0,4 |
0,3 |
|
106
Задание 2. Двухтактный одноцилиндровый двигатель
Кинематическая схема: двухтактный двигатель содержит кривошипноползунный механизм, состоящий из звеньев 1–3, и кулачковый привод гидроклина, состоящий из звеньев 4–6. Кулачок получает вращение через зубчатые колеса zш и zк.
Параметры |
Обозна- |
|
|
|
|
|
Вариант |
|
|
|
|
|
||
кривошипно-ползунного |
|
|
|
|
|
|
|
|
|
|
|
|
||
чение |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
||
механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частота вращения, с–1 |
ω1 |
|
250 |
550 |
600 |
650 |
750 |
700 |
300 |
350 |
400 |
500 |
450 |
600 |
Длина кривошипа, м |
l1·10–2 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
20 |
18 |
|
Длина шатуна, м |
l2·10–2 |
55 |
57 |
59 |
60 |
62 |
64 |
66 |
68 |
70 |
72 |
60 |
58 |
|
Координаты центра |
l3·10–2 |
7,0 |
8,0 |
9,0 |
10 |
9,0 |
10 |
11 |
12 |
13 |
14 |
10 |
9,0 |
|
масс кривошипа, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Координаты центра |
l4·10–2 |
20 |
22 |
25 |
28 |
24 |
29 |
30 |
32 |
35 |
30 |
30 |
25 |
|
масс шатуна, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Масса кривошипа, кг |
m1·10–2 |
34 |
35 |
36 |
38 |
40 |
50 |
45 |
56 |
58 |
60 |
40 |
50 |
|
Масса шатуна, кг |
m2·10–2 |
48 |
50 |
52 |
55 |
60 |
63 |
66 |
68 |
70 |
72 |
60 |
50 |
|
Масса поршня, кг |
m3·10–2 |
6,0 |
7,0 |
8,0 |
8,2 |
8,5 |
8,7 |
8,9 |
9,0 |
8,0 |
6,0 |
8,0 |
9,0 |
|
Момент инерции |
J0·10 |
–5 |
0,7 |
0,8 |
0,9 |
0,95 |
1,0 |
1,2 |
1,15 |
1,25 |
1,3 |
1,35 |
1,2 |
0,9 |
кривошипа, кгм2 |
|
|||||||||||||
Момент инерции |
|
–4 |
2,0 |
2,2 |
2,3 |
2,4 |
2,5 |
2,6 |
2,8 |
2,9 |
3,0 |
3,2 |
2,3 |
2,5 |
2 |
Js2·10 |
|||||||||||||
шатуна, кгм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Неравномерность хода |
δ·10–2 |
4,0 |
3,0 |
5,0 |
4,0 |
3,0 |
5,0 |
4,0 |
5,0 |
3,0 |
4,0 |
4,0 |
3,0 |
|
107
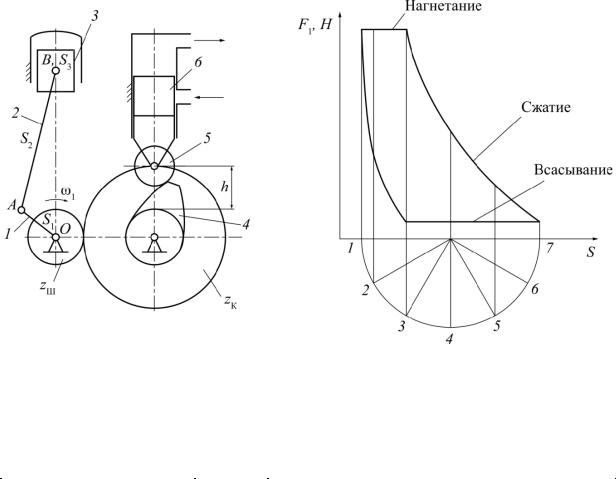
Задание 3. Воздушный одноступенчатый компрессор
Кинематическая схема: воздушный компрессор содержит кривошип- но-ползунный механизм 1–3 и кулачковый привод выпускного клапана, состоящий из звеньев 4–6. Кулачок получает вращение через зубчатые колеса zш и zк.
Параметры |
Обозна- |
|
|
|
|
|
Вариант |
|
|
|
|
|
|
кривошипно-ползунного |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
механизма |
чение |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частота вращения, с–1 |
ω1 |
50 |
60 |
70 |
80 |
50 |
60 |
70 |
80 |
90 |
60 |
70 |
80 |
Длина кривошипа, м |
l1·10–2 |
10 |
12 |
14 |
15 |
12 |
14 |
15 |
12 |
14 |
15 |
16 |
12 |
Длина шатуна, м |
l2·10–1 |
5 |
6 |
7 |
8 |
5 |
6 |
7 |
6 |
7 |
8 |
6 |
5 |
Координатыцентра масс |
l3·10–2 |
5,0 |
6,0 |
7,0 |
7,0 |
6,0 |
7,0 |
8,0 |
5,0 |
7,0 |
8,0 |
8,0 |
6,0 |
кривошипа, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
Координатыцентра масс |
l4·10–1 |
2 |
3 |
4 |
3 |
2 |
3 |
4 |
3 |
4 |
4 |
3 |
2 |
шатуна, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
Масса кривошипа, кг |
m1·10–1 |
1,2 |
1,4 |
1,6 |
1,8 |
1,3 |
1,4 |
1,5 |
1,2 |
1,3 |
1,4 |
1,5 |
1,2 |
Масса шатуна, кг |
m2·10–1 |
2,5 |
2,6 |
2,7 |
2,8 |
2,5 |
2,6 |
2,7 |
2,3 |
2,5 |
2,6 |
2,8 |
2,4 |
Масса поршня, кг |
m3·10–1 |
3,5 |
3,6 |
3,7 |
3,8 |
3,4 |
3,5 |
3,6 |
3,2 |
3,4 |
3,5 |
3,8 |
3,5 |
Момент инерции |
–3 |
|
|
|
|
|
|
|
|
|
|
|
|
кривошипа, кгм2 |
J0·10 |
8,0 |
8,5 |
9,0 |
9,5 |
8,2 |
9,0 |
9,5 |
8,3 |
8,5 |
9,0 |
9,5 |
8,0 |
Момент инерции шатуна, |
–2 |
2,0 |
2,5 |
3,0 |
4,0 |
2,0 |
2,5 |
3,0 |
2,2 |
2,5 |
3,0 |
3,5 |
2,0 |
2 |
Js2·10 |
||||||||||||
кгм |
|
|
|
|
|
|
|
|
|
|
|
|
|
Неравномерность хода |
δ·10–2 |
4,0 |
3,0 |
2,0 |
2,0 |
30 |
4,0 |
2,0 |
3,0 |
4,0 |
2,0 |
3,0 |
4,0 |
108
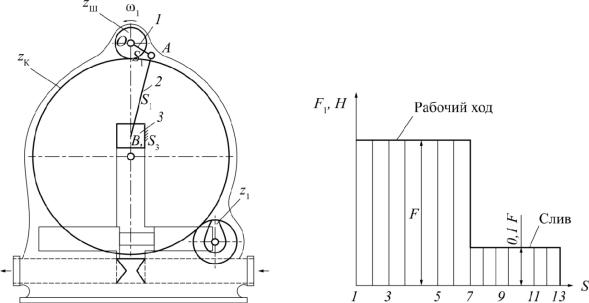
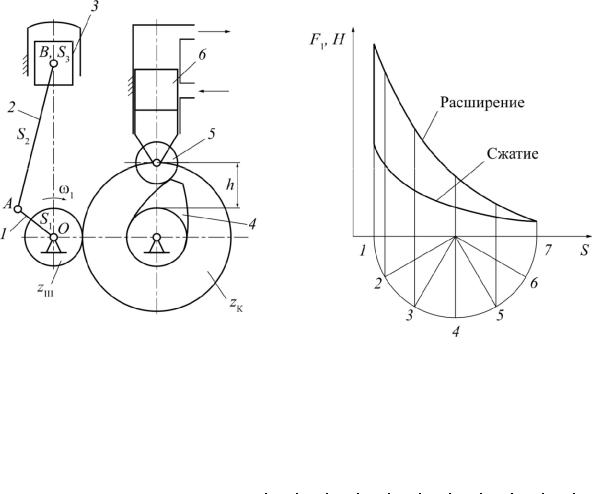
Задание 4. Гидромотор
Кинематическая схема: гидромотор состоит из кривошипно-ползун- ного механизма 1–3. Распределительный золотник выполнен в виде толкателя кулачкового механизма. Кулачок получает вращение от главного вала 1 через зубчатую передачу zш, zк, z1.
Параметры |
Обозна- |
|
|
|
|
|
Вариант |
|
|
|
|
|
|
кривошипно-ползунного |
|
|
|
|
|
|
|
|
|
|
|
|
|
чение |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|
Частота вращения, с–1 |
ω1 |
75 |
73 |
70 |
68 |
65 |
63 |
60 |
58 |
55 |
53 |
50 |
48 |
Длина кривошипа, м |
l1·10–1 |
0,4 |
0,5 |
0,6 |
0,5 |
0,6 |
0,4 |
0,5 |
0,6 |
0,4 |
0,5 |
0,6 |
0,4 |
Длина шатуна, м |
l2·10–1 |
1,8 |
1,9 |
2 |
2,1 |
2,2 |
2,3 |
2,4 |
1,8 |
2 |
2,2 |
2,4 |
2 |
Координатыцентра масс |
l3·10–1 |
0,2 |
0,3 |
0,3 |
0,2 |
0,3 |
0,2 |
0,3 |
0,2 |
0,2 |
0,3 |
0,3 |
0,2 |
кривошипа, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
Координатыцентра масс |
l4·10–1 |
0,9 |
1 |
1,1 |
1,2 |
1,3 |
1,4 |
1,4 |
0,9 |
1 |
1,1 |
1,2 |
1 |
шатуна, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
Масса кривошипа, кг |
m1 |
2 |
2,1 |
2,2 |
2,3 |
2,4 |
2,2 |
2,3 |
2,4 |
2,5 |
2 |
2,1 |
2,2 |
Масса шатуна, кг |
m2·10–1 |
8 |
9 |
10 |
11 |
12 |
14 |
14 |
12 |
11 |
10 |
9 |
8 |
Масса поршня, кг |
m3 |
1,5 |
1,6 |
1,7 |
1,8 |
1,9 |
2 |
2 |
1,9 |
1,8 |
1,7 |
1,6 |
1,7 |
Момент инерции |
–2 |
|
|
|
|
|
|
|
|
|
|
|
|
кривошипа, кгм2 |
J0·10 |
2 |
3 |
4 |
5 |
6 |
5 |
4 |
3 |
2 |
3 |
4 |
5 |
Момент инерции шатуна, |
–3 |
4 |
5 |
6 |
7 |
8 |
9 |
8 |
7 |
6 |
5 |
4 |
6 |
2 |
Js2·10 |
||||||||||||
кгм |
|
|
|
|
|
|
|
|
|
|
|
|
|
Неравномерность хода |
δ·10–1 |
0,5 |
0,4 |
0,3 |
0,2 |
0,4 |
0,5 |
0,3 |
0,4 |
0,5 |
0,4 |
0,5 |
0,4 |
Усилие нагнетания, Н |
F·103 |
7 |
8 |
9 |
10 |
11 |
12 |
7 |
8 |
9 |
10 |
11 |
12 |
109
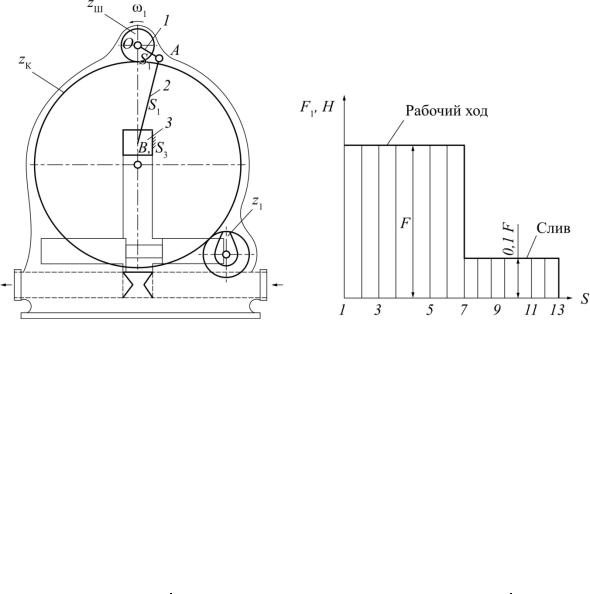
Задание 5. Гидроцилиндр
Кинематическая схема: гидромотор состоит из кривошипно-ползун- ного механизма 1–3. Распределительный золотник выполнен в виде толкателя кулачкового механизма. Кулачок получает вращение от главного вала 1 через зубчатую передачу zш, zк, z1.
Параметры |
Обозна- |
|
|
|
|
|
Вариант |
|
|
|
|
|
||
кривошипно-ползунного |
|
|
|
|
|
|
|
|
|
|
|
|
||
чение |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
||
механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частота вращения, с–1 |
ω1 |
|
80 |
90 |
100 |
110 |
120 |
110 |
100 |
80 |
90 |
100 |
110 |
120 |
Длина кривошипа, м |
l1·10–2 |
2 |
3 |
2,2 |
2,4 |
2,5 |
2,6 |
2,7 |
2,8 |
3 |
2,5 |
2,2 |
2,5 |
|
Длина шатуна, м |
l2·10–1 |
1 |
1,2 |
1,4 |
1,5 |
1,4 |
1,3 |
1,2 |
1,1 |
1,0 |
1,1 |
1,2 |
1,3 |
|
Координатыцентра масс |
l3·10–2 |
1,0 |
1,2 |
1,1 |
1,1 |
1,2 |
1,3 |
1,3 |
1,4 |
1,5 |
1,0 |
1,0 |
1,0 |
|
кривошипа, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Координатыцентра масс |
l4·10–2 |
5 |
6 |
7 |
8 |
7 |
6 |
7 |
5 |
6 |
5 |
6 |
7 |
|
шатуна, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Масса кривошипа, кг |
m1·10–1 |
2 |
2,5 |
3 |
3,5 |
4 |
4 |
3,5 |
3 |
2,5 |
2 |
3 |
4 |
|
Масса шатуна, кг |
m2 |
|
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,7 |
0,5 |
0,5 |
0,4 |
0,6 |
0,8 |
Масса поршня, кг |
m3 |
|
0,5 |
0,6 |
0,6 |
0,7 |
0,8 |
0,9 |
0,9 |
0,7 |
0,8 |
0,6 |
0,8 |
0,9 |
Момент инерции |
J0·10 |
–5 |
4,0 |
4,5 |
5 |
6 |
6,5 |
5,5 |
3 |
5,5 |
5 |
4 |
6 |
6,5 |
кривошипа, кгм2 |
|
|||||||||||||
Момент инерции шатуна, |
|
–4 |
12 |
13 |
14 |
15 |
16 |
15 |
14 |
13 |
14 |
12 |
15 |
16 |
2 |
Js2·10 |
|||||||||||||
кгм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Неравномерность хода |
δ ·10–2 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
4 |
2 |
3 |
|
Усилие нагнетания, Н |
F·103 |
25 |
30 |
35 |
40 |
50 |
40 |
35 |
30 |
25 |
30 |
35 |
40 |
|
110