

2760.Практикум по теории механизмов и механике систем машин
..pdfПриведенный момент инерции – это теоретический момент инерции, которым должно обладать звено приведения, чтобы его кинетическая энергия была равна удвоенной сумме кинетических энергий приводимых звеньев:
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
= |
2 Ti |
|
|
|
|
|||
|
|
J |
i |
|
i=1 |
. |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
ωi2 |
|
|
|
|
|||
Сумма кинетических энергий приводимых звеньев определяется по |
||||||||||||
формуле |
|
|
|
|
|
|
|
|
|
|
|
|
n |
p+T |
m V 2 |
|
r+T |
J |
si |
ω2 |
|||||
Ti |
= ( |
|
i |
|
si |
|
) + ( |
|
i |
), |
||
|
|
2 |
|
|
|
|
2 |
|||||
i=1 |
i=1 |
|
|
|
|
i=1 |
|
|
|
|||
где mi – масса i-го звена, |
кг; Vsi |
– скорость центра масс i-го звена, м/c; |
||||||||||
Jsi – момент инерции i-го звена относительно оси, проходящей через его центр масс, м2кг; ωi – угловая скорость i-го звена, с–2; r, p – число звеньев, совершающих вращательное или поступательное движение соответственно.
Каждое звено технической системы, обладая собственной массой, находится под действием силы тяжести. Силы тяжести являются следствием действия на звенья технической системы притяжения Земли и относятся к внешним движущим силовым факторам.
Внешние силовые факторы – это силы и моменты пар сил, действующие на техническую систему (механизм) со стороны внешних систем (механизмов) и совершающие работу над этой системой (механизмом). К ним относятся движущие силовые факторы и силовые факторы сопротивления. Факторами сопротивления являются силовые факторы полезного сопротивления и силовые факторы трения.
Сила тяжести i-го звена, Н, рассчитывается по формуле
Gi = g · mi,
где g – ускорение свободного падения, м/с2; mi – масса i-го звена, кг. Масса i-го звена, кг, определяется следующим образом:
mi = ki · li,
здесь li, ki – длина и коэффициент удельной массы i-го звена. Коэффициент удельной массы выбирается из следующих интервалов: для кривошипов – 8–12 кг/м; для шатунов – 15–20 кг/м;
для коромысел и кулис – 25–40 кг/м.
71

Масса ползуна, кг, вычисляется по выражению m2 = 0,7m3.
где m2, m3 – соответственно масса ползуна и шатуна, образующего с этим ползуном вращательную кинематическую пару.
Теоретические силовые факторы – это силы и моменты пар сил, которые не существуют в реальности, а используются в различных видах анализа технических систем с целью их упрощения. К ним относятся приведенные силовые факторы и силовые факторы инерции.
Силовые факторы инерции
Силовыми факторами инерции являются силы инерции и моменты пар сил инерции.
Сила инерции, Н, вычисляется по формуле
Fиi = mi · asi ,
где mi – масса i-го звена, кг; asi – ускорение центра масс i-го звена, м/c2.
Для определения линии и направления действия главного вектора силы инерции используется уравнение
Fиi = −mi asi .
Знак «–» в этой формуле означает, что вектор силы инерции лежит на линии действия ускорения центра масс i-го звена и направлен противоположно направлению действия вектора ускорения центра масс (рис. 3.2). При этом вектор ускорения центра масс i-го звена определяется с помощью теоремы подобия на плане ускорений.
Момент пары сил инерции, H·м, вычисляется по формуле
Mиi = –Jsi · εi.
где Jsi – момент инерции i-го звена относительно оси, проходящей через его центр масс, 2·мкг; εi – угловое ускорение i-гозвена, с–2.
Знак «–» в формуле означает, что направление действия момента пары сил инерции i-го звена противоположно направлению действия углового ускорения этого же звена (рис. 3.2).
Звено движется поступательно с некоторым ускорением.
Случай 1. Звено 2 движется поступательно по подвижному звену 1 (рис. 3.2, а). Центр масс звена 2 является подвижным, следовательно, на звено действует вектор силы инерции Fи2 , направленный противоположно
вектору ускорения центра масс, и момент пары сил инерции Ми2 , действующий противоположно направлению углового ускорения этого звена.
72

Рис. 3.2. Теоретические силовые факторы для частных случаев движения звеньев
Случай 2. Звено 2 движется поступательно по неподвижному звену 1 (рис. 3.2, б). Центр масс звена 2 является подвижным, следовательно, на звено действует вектор силы инерции Fи2, направленный противоположно
вектору ускорения центра масс, а момент пары сил инерции Mи2 равен нулю, так как угловое ускорение этого звена равно нулю, т.е. ε2 = 0 = Mи2 = 0.
Звено совершает вращательное движение.
Случай 1. Звено 3 совершает вращательное движение с некоторым ускорением, а центр масс этого звена не совпадает с осью вращения (рис. 3.2, в). Центр масс звена 3 является подвижным, следовательно, на звено действует вектор силы инерции Fи3, направленный противоположно вектору ускоре-
ния центра масс, и момент пары сил инерции Mи3, действующий противопо-
ложно направлению углового ускорения этого звена Случай 2. Звено 3 совершает равномерное вращательное движение,
а центр масс этого звена не совпадает с осью вращения (рис. 3.2, г). Центр масс звена 3 является подвижным, следовательно, на звено действует вектор силы инерции Fи3, направленный противоположно вектору ускорения
центра масс, а момент пары сил инерции Mи3 равен нулю, так как угловое ускорение этого звена равно нулю, т.е. ε3 = 0 Mи3 = 0.
Случай 3. Звено 2 совершает вращательное движение с некоторым ускорением, а центр масс этого звена совпадает с осью вращения (рис. 3.2, д). Центр масс звена 2 является неподвижным, следовательно, на звено действует момент пары сил инерции Mи2, направленный противоположно угло-
вому ускорению этого звена, сила инерции равна нулю, так как ускорение центра масс равно нулю, т.е. аs2 = 0 Fи2 = 0.
Случай 4. Звено 1 совершает равномерное вращательное движение, а центр масс этого звена совпадает с осью вращения (рис. 3.2, е). Центр масс звена 2 является неподвижным, следовательно, на звено не действуют
73
ни сила инерции, ни момент пары сил инерции, так как ускорение центра масс равно нулю, т.е. аs1 = 0 Fи1 = 0, и момент пары сил инерции равен нулю, так как угловое ускорение этого звена равно нулю, т.е. ε1 = 0 Mи1.
Приведенные силовые факторы
Приведенными силовыми факторами, действующими на звенья технических систем, являются приведенная масса и приведенный момент инерции.
В общем случае значение приведенной массы любой технической системы характеризуется следующим выражением:
mп = mпI + mпII ,
где mпI , mпII – постоянная и переменная части приведенной массы. Постоянная часть приведенной массы, кг, рассчитывается по формуле
mпI = mпэ + mпп + m1 ,
здесь mпэ, mпп, m1 – приведенные массы соответственно энергетической ма-
шины, преобразующего устройства и ведущего звена плоского рычажного механизма рабочей машины. Условиями работы величины приведенных масс энергетической машины и преобразующего устройства не заданы, сле-
довательно, значения этих параметров приравниваем к нулю, тогда mI |
= m1. |
|||||
|
|
|
|
|
п |
|
Переменная часть приведенной массы определяется по выражению |
||||||
|
n−1 |
|
n−1 |
|
|
|
mII = |
2 T |
= |
Ti |
|
|
|
i=1 |
i=1 |
|
, |
|
||
п |
V 2 |
|
V |
2 |
|
|
|
п |
|
A |
|
|
|
n−1
где Vп = VА – линейная скорость звена приведения; Ti – сумма кинетиче-
i=1
ских энергий, развиваемых приводимыми звеньями механизма; n – количество подвижных звеньев механизма. Сумма кинетических энергий, развиваемых приводимыми звеньями кривошипно-ползунного механизма, вычисляется по выражению
n−1
Ti = T1 + T2 + T3.
i=1
Кинетическая энергия каждого приводимого звена технической системы выражается через кинематические параметры в зависимости от видов движения, ими совершаемых. При этом кинематические параметры технической системы выражаются через элементы планов скоростей.
74
3.2. Силовой расчет вибрационного механизма
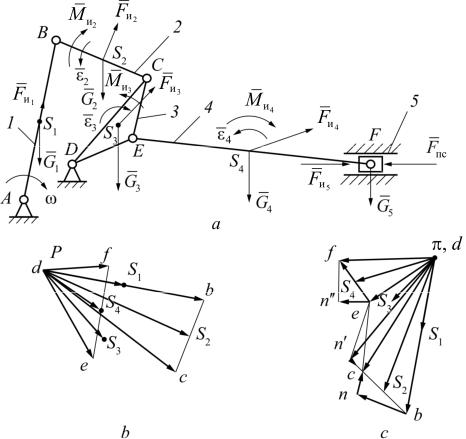
Для данного положения механизма (рис. 3.3) произвести кинетостатический расчет, т.е. определить давления (реакции) во всех кинематических парах и потребную мощность двигателя.
Рис. 3.3. Схема механизма: а – план положения механизма; б – план скоростей; в – план ускорений
Считаем известными размеры звеньев, положения центров тяжести, веса, момент инерции звеньев относительно собственных центров тяжести Jsi, силу полезного сопротивления Fпc и угловую скорость кривошипа ω = const. Главный вал рабочей машины соединен с ведущим валом посредством муфты.
3.2.1.Определение сил инерции звеньев и моментов пары сил
Вобщем случае плоскопараллельного движения все силы инерции каждого звена могут быть приведены к главному вектору сил инерции, приложенному в центре масс звена, и к паре сил инерции. Величина силы инерции, Н, определяется как произведение массы звена на ускорение центра тяжести:
|
|
|
= − |
G |
|
|
, |
F |
|
||||||
|
a |
||||||
|
|
||||||
|
иi |
|
g |
si |
|||
75

и направлена эта сила в сторону, противоположную ускорению центра тяжести. Ускорение центра тяжести берется из плана ускорений для рассматриваемого положения механизма (рис. 3.3, с):
|
= − |
G1 |
|
|
s1 = − |
G1 |
μ |
|
( |
|
|
|
|||||||||||||||||||||
|
|
|
a |
|
|
ps ), |
(3.1) |
||||||||||||||||||||||||||
F |
a |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||
|
и1 |
g |
|
|
g |
|
1 |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
= − |
|
G2 |
|
μ |
|
|
( |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ps ), |
|
(3.2) |
||||||||||||||||||
|
|
F |
|
|
|
a |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
и2 |
|
|
|
|
|
|
g |
|
|
|
|
2 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
= − |
G3 |
μ |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
( |
ps ), |
|
(3.3) |
|||||||||||||||||||
|
|
F |
a |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
и3 |
|
|
|
|
|
|
g |
|
|
|
|
3 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
= − |
|
G4 |
μ |
|
|
( |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
ps ), |
|
(3.4) |
|||||||||||||||||||||
|
|
F |
a |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
и4 |
|
|
|
|
|
|
g |
|
|
|
|
4 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
= − |
G5 |
μ |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
( |
ps ), |
|
(3.5) |
|||||||||||||||||||||
|
|
F |
a |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
и5 |
|
|
|
|
|
|
g |
|
|
|
|
5 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где g – ускорение земного притяжения, мс2 .
Момент пары сил инерции равен произведению момента инерции Jsi звена относительно оси, проходящей через центр тяжести, на угловое ускорение звена:
|
|
|
|
М |
иi = − Jsi εi . |
(3.6) |
|
Направление действия момента пары сил инерции противоположно угловому ускорению звена. Угловое ускорение каждого звена, Нм, определяется как частное от деления относительного тангенциального ускорения ка- ких-либо двух его точек на расстоянии между точками: Миi = Jsi εi = 0 , так
как ω1 = const и, следовательно, ε1 = 0;
|
|
|
|
|
|
|
|
μa ( |
cn |
) |
|
|
|
|
|||||
Ми2 |
= − Jz2 |
ε2 = − Js2 |
|
, |
(3.7) |
||||||||||||||
|
με (BC) |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
μa ( |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
cn') |
|
|
|
||||||||
Ми3 |
= − Jz3 |
ε3 = − Js2 |
|
, |
(3.8) |
||||||||||||||
|
με (CD) |
|
|||||||||||||||||
|
|
|
|
|
|
|
μa ( |
|
'') |
|
|
||||||||
|
|
|
|
|
|
|
fcn |
|
|
||||||||||
Ми4 |
= − Jz4 ε3 = − Js2 |
, |
(3.9) |
||||||||||||||||
|
με (EF ) |
|
|||||||||||||||||
Ми5 = 0, так как звено 5 движется поступательно.
76
Для определения направления углового ускорения второго звена переносим с плана ускорений отрезок сп, изображающий тангенциальное ускорение точки С звена СВ относительно точки 5, в точку С механизма.
Вектор aCBτ , приложенный в точке С, производит вращение звена ВС
относительно точки В против направления вращения часовой стрелки. Следовательно, таким и будет направление углового ускорения ε2 .
Направление действия момента Ми пары сил инерции будет противоположно угловому ускорению ε2 . Направление углового ускорения ε3 звена
3 определяется по тангенциальному ускорению aCBτ . Для этого достаточно вектор n,C мысленно приложить в точке С механизма и проверить, каково
будет направление вращения звена CD относительно точки D.
На рис. 3.3, а это направление ε3 совпадает с направлением вращения часовой стрелки. Значит, момент Ми3 будет направлен против направления
вращения часовой стрелки.
Аналогично определяется направление углового ускорения (см. рис. 3.3, а). Угловое ускорение ε4 направлено против направления вращения часовой
стрелки, а момент Ми4 действует по направлению вращения часовой стрелки.
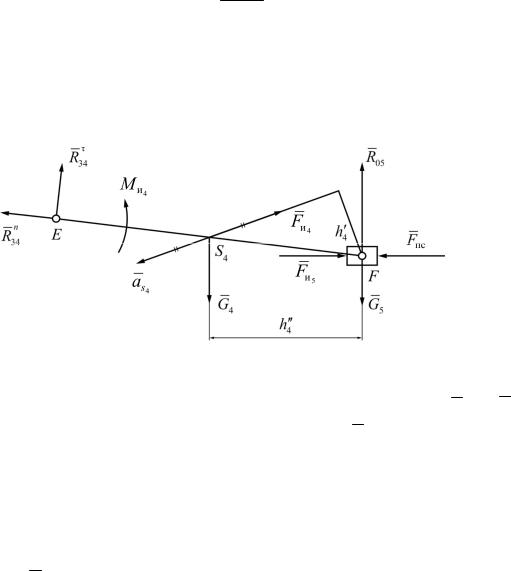
3.2.2. Определение реакций в кинематических парах структурной группы 2-го класса 2-го вида (звенья 5 и 4)
Разбиваем механизм на группы Ассура и начинаем рассмотрение с той группы, для которой известны все внешние силы. Порядок рассмотрения групп при кинетостатическом расчете будет обратным порядку кинематического.
Скорость точки приложения уравновешивающей силы:
VN = ω1 ZB .
Далее составляем уравнение равновесия рычага Жуковского в следующем виде:
Fy ( pn)μl + G1h1μl + G3h3μl + Fи3 h3' μl +
|
+G h μ |
l |
+ F h' |
μ |
l |
− (F |
− F )( pt)μ |
l |
= 0 , |
|
|
(3.10) |
|||
|
4 4 |
|
|
и4 4 |
|
пс |
и5 |
|
|
|
|
|
|||
|
−G h − G h − F h' |
− G h − F h' |
+ (F − F |
)( pt) |
|
|
|||||||||
Fy = |
1 1 |
3 3 |
и3 |
3 |
|
4 4 |
и4 4 |
|
пс и5 |
. |
(3.11) |
||||
|
|
|
|
|
|
|
L( pn) |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
77
Таким образом, если к звеньям механизма приложены силы и моменты, то уравнение равновесия вспомогательного рычага можно написать в следующем виде:
|
|
in−1 |
|
i hiμl |
+ in−1 |
|
iμl |
|
|
|
|
|
F |
M |
|
|
|||||
F y = |
. |
(3.12) |
||||||||
|
|
L( pn)μl |
||||||||
|
|
|
|
|
|
|||||
Мощность двигателя определяется по аналогии с предыдущим примером.
M урω ,
Nдв = η
где η – КПД механизма исследования. Поэтому в первую очередь рассматриваем структурную группу 22, состоящую из звеньев 4–5. Эта структурная группа со всеми действующими на нее силами, включая и силы инерции, показана на рис. 3.4.
Рис. 3.4. Структурная группа 222
Действие отброшенных звеньев заменено действием реакций R05 и R34 , которые необходимо определить. Разложим реакцию R34 на две составляю-
щие: |
|
n |
– реакция, действующая вдоль звена EF, |
|
τ |
– действующая пер- |
|||||||
|
|
||||||||||||
R34 |
R34 |
||||||||||||
пендикулярно звену EF, при этом |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
n |
|
|
τ |
|
|
(3.13) |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
R34 = R34 |
+ R34 . |
|
|
||||||
Реакция R05 будет проходить через центр шарнира F, так, все силы, действующие на звено 5, проходят через центр шарнира F.
За порядком нахождения искомых реакций (давлений) в структурной группе 22 можно проследить по табл. 3.1.
78

Таблица 3 . 1 Таблица для определения реакций в кинематических парах
Искомый параметр |
Уравнение равновесия |
Звено, для которого |
|||||||||||
составляется уравнение |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
n |
|
|||||
|
|
|
|
34τ |
|
|
|
(F ) = 0 |
|
||||
|
|
|
|
M |
4 |
||||||||
R |
|||||||||||||
|
|
|
|
|
|
|
i−1 |
|
|||||
|
|
|
|
|
|
|
|
n |
|
||||
|
|
05 и |
|
34n |
|
|
= 0 |
4 и 5 |
|||||
|
R |
R |
F |
||||||||||
|
|
|
|
|
|
|
i−1 |
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
n |
|
||||
|
|
|
|
|
|
|
= 0 |
5 |
|||||
|
|
|
R |
45 |
F |
||||||||
|
|
|
|
|
|
|
i−1 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Далее приступаем к написанию развернутых уравнений равновесия и к определению сил.
1. Величина R34τ может быть непосредственно получена из уравнения
равновесия, написанного для звена 4.
Звено 4 находится под действием следующих сил: веса G4, результирующей силы инерции Fи4 , составляющих R34n и R34τ реакции R34 и реакции R05 , которой заменено действие отсоединенного звена 5.
Направление силы R34τ определяется составлением уравнения моментов всех сил, действующих на звено 4 относительно точки F.
Если величина силы окажется отрицательной, то направление должно быть выбрано противоположным.
n
M (F) = R34τ (EF)μl − G4h4''μl + Fи4 h4' μl − Mи4 = 0 , (3.14)
i−1
откуда
|
|
G h'' |
μ |
l |
− F h' |
μ |
l |
+ M |
и4 |
|
|
|
Rτ |
= |
4 4 |
|
и4 |
4 |
|
|
. |
(3.15) |
|||
|
|
|
|
|
|
|
|
|
||||
34 |
|
|
|
|
LEF |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.Составляем уравнение равновесия структурной группы, приравнивая
кнулю векторную сумму всех сил, действующих на группу:
n |
|
|
|
n |
|
|
τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
F =R34 |
+ R34 |
+ G4 + Fи4 |
+ G5 + Fи5 + F пс + R05 = 0 . |
(3.16) |
||||||||||||||||
i−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При составлении векторной суммы сил удобно неизвестные по величине силы писать в начале и в конце уравнения, чтобы при построении плана сил было проще найти их величину.
79
Кроме того, при составлении уравнения (3.16) рационально силы, относящиеся к одному звену, писать последовательно друг за другом, так как это упрощает в дальнейшем определение реакции во внутренней кинематической паре.
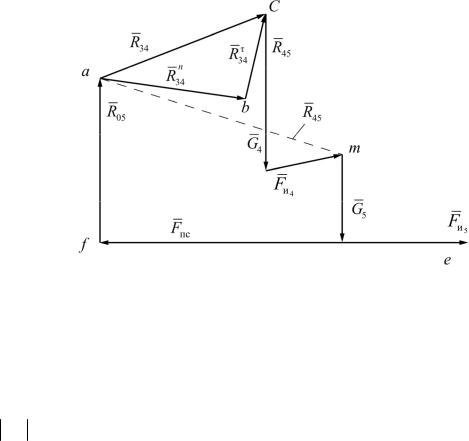
Построение плана сил для структурной группы 22 показано на рис. 3.5.
Рис. 3.5. План сил структурной группы 222
Если наибольшая сила Fпс, то
μF |
= |
|
|
Fпс |
|
|
, |
|
|
Fпс |
|
|
|||
|
|
||||||
|
|
|
|
|
|
|
где Fпс – вектор силы Fпс.
Далее в этом масштабе из точки а проводим линию действия нормаль-
ной составляющей реакции звена 3 на звено 4 Rn и откладываем отрезок |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
34 |
|
|
|||||||||||
|bc|, выражающий в масштабе μF силу Rτ . |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
34 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
τ |
прибавляем вектор G4 и так далее согласно |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Затем к концу вектора R34 |
|||||||||||||||||||||||||
уравнению (3.16). |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Из конца вектора |
|
пс( f ) проводим линию действия реакции |
|
05. Точ- |
|||||||||||||||||||||
F |
R |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ка а – точка пересечения линий действия R 05 и R34 . |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
τ |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Геометрически сложив R34 |
и R34 , определим полную реакцию в шар- |
||||||||||||||||||||||||
нире Е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Отрезок |
изображает искомую реакцию R05 : |
||||||||||||||||||||||||
fa |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
R05 = μ p ( fa), |
|||||||||||||
а отрезок |
|
ac |
|
– искомую реакцию |
|
34 : |
|||||||||||||||||||
|
|
R |
|||||||||||||||||||||||
80