

2760.Практикум по теории механизмов и механике систем машин
..pdf2.9.4. Кулисный механизм
Рассмотрим кинематику кулисного механизма (рис. 2.13) с качающейся кулисой.
Уравнение замкнутости векторного контура АВСА:
|
l |
1 + |
l |
3 + |
l |
4 = 0. |
(2.26) |
Вектор l3 , характеризующийся положением камня, переменен по величине и направлению. Проектируя уравнения замкнутости (2.27) на оси неподвижной системы координат XCY, получаем систему уравнений относи-
тельно l3 и φ3:
l1 cos ϕ1 = l3 cosϕ3 , |
|
l 1 sin ϕ1 + l4 = l3 sin ϕ3. |
(2.27) |
В результате решения системы получаем
tgϕ = |
l1 sin ϕ1 + l4 |
= |
sin ϕ1 + λ4 |
, |
(2.28) |
|
|
|
|||||
3 |
l1 cos |
ϕ1 |
|
cosϕ1 |
|
|
|
|
|
||||
l |
= l |
1+ λ4 |
+ 2λ |
4 |
sin ϕ . |
3 |
1 |
4 |
|
1 |
Рис. 2.13. Схема кулисного механизма
61
Окончательно
|
|
|
sinϕ1 |
+λ4 |
при |
|
|
= l1 sin ϕ1 + l4 ≥ 0; |
|||||||
|
arctg |
|
|
|
|
yB1 |
|||||||||
|
cosϕ1 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
π + arctg |
sinϕ1 +λ4 |
при |
y |
B |
= l |
sin ϕ + l |
4 |
< 0; |
||||||
|
|
||||||||||||||
|
|
|
|
|
cosϕ1 |
|
|
|
|
1 |
1 |
|
|||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
ϕ3 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
(2.29) |
|
3 π |
|
|
|
|
|
|
|
|
3 |
|
|
|
|||
|
− |
|
|
|
|
при ϕ = |
π; |
|
|
||||||
|
|
2 |
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
π |
|
|
|
|
|
при ϕ1 = |
. |
|
|
|
||||
|
|
|
|
|
|
|
2 |
|
|
|
|||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Координаты точек В и D будут следующими: xB1 = l1 cos ϕ1,
yB1 = l4 + l1 sin ϕ1, xD = lCD cos ϕ3 , yD = lCD sin ϕ3.
Задача о скоростях
Дифференцируя по времени систему (2.27), получим уравнение для определения скоростей:
−l sin ϕ ω = V |
cos ϕ |
3 |
− l sin ϕ ω , |
|
|||||||
1 |
1 1 |
|
B3B1 |
|
|
3 |
3 3 |
(2.30) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
l1 cosϕ1ω1 = VB B sin ϕ3 + l3 cosϕ3ω3 , |
|
||||||||||
|
|
|
|
3 1 |
|
|
|
|
|
|
|
где относительная скорость |
V |
|
= |
dl3 |
. |
|
|
|
|
||
|
|
|
|
|
|
||||||
|
|
B B |
|
dt |
|
|
|
|
|
|
|
|
|
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из системы (2.30) определяем угловую скорость звена и относитель- |
|||||||||||
ную скорость: |
|
|
|
|
|
|
|
|
|
|
|
ω = cos(ϕ1 − ϕ3 ) или ω3 = u31ω1, |
|
||||||||||
3 |
|
|
|
λ3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
VB B |
= l1ω1 sin(ϕ1 − ϕ3 ), |
|
(2.31) |
||||||||
|
3 |
1 |
|
|
|
|
|
|
|
|
|
где |
ω31 = cos(ϕ1 − ϕ3 ) . |
|
|
||||||||
|
|
|
|
|
|
|
λ3 |
|
|
|
|
62
Находим проекции линейных скоростей точек Bf и D: xB1 = −l1ω1 sin ϕ1,
yB1 = l1ω1 cosϕ1, xD = lCDω3 sin ϕ3 , yD = lCDω3 cosϕ3.
Задача об ускорениях
Из дифференцирования уравнений (2.30) получаем систему уравнений относительно угловых ускорений звеньев и ускорение точек:
|
|
|
−l cosϕ ω −l sinϕ ε = a |
cosϕ − 2ν |
|
ω sinϕ −l ε cosϕ −l ω sinϕ ; |
|
||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
|
1 1 |
1 |
|
1 1 |
B3B1 |
|
3 |
|
|
B3B1 3 |
3 |
|
3 3 |
3 |
3 3 |
3 |
(2.32) |
||||||
|
|
−l sinϕ ω2 |
+ l cosϕ ε = a2 |
sinϕ + 2ν |
|
ω cosϕ + l |
ε sinϕ −l ω2 cosϕ . |
||||||||||||||||||||
|
|
|
1 |
|
1 1 |
1 |
|
1 1 |
B B |
|
3 |
|
|
B B |
3 |
3 |
|
3 3 |
3 |
3 3 |
3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
3 1 |
|
|
|
|
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
В полученных соотношениях |
2ν |
B B |
ω = a2 |
|
|
– ускорение Кориолиса, |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
B B |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
1 |
|
|
3 |
1 |
|
|
|
|
|
|
|
dνB B |
– релятивное ускорение. Из системы уравнений (2.32) определяем |
|||||||||||||||||||||||||
|
|
3 1 |
|
||||||||||||||||||||||||
|
|
dt |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ε3 |
и aB2 B : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
= |
cos(ϕ − ϕ ) |
ε − |
ω2 cos(ϕ − ϕ ) |
− |
aB2 B |
, |
|
|
||||||||||
|
|
|
|
|
|
|
|
1 |
|
3 |
|
1 |
|
|
1 |
|
3 |
|
3 1 |
|
|
||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
λ3 |
|
1 |
|
|
|
|
λ3 |
|
|
|
|
|
l3 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
cos(ϕ − ϕ ) |
|
|
|
|
|
|
|
(2.33) |
|||||
|
|
|
|
aB B |
= −ε1l1 sin(ϕ1 − ϕ3 ) + ω1 |
|
|
|
|
1 |
3 |
− cos(ϕ1 − ϕ3 ) l1. |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
λ3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Находим проекции ускорений точек B1 и D: |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
xB |
= −l1ω12 cosϕ1 − ε1l1 sin ϕ1, |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yB |
= l1ω12 sin ϕ1 + ε1l1 cosϕ1, |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yD = −lCDε3 sin ω3 − lCDω32 cosϕ3 ,
yD = lCDε3 cosω3 − lCDω32 sin ϕ3.
Кинематические характеристики точек S3, K и других находятся так же, как и в предыдущих примерах.
63
Порядок выполнения работы
Задание 1
1.Проанализировать структурную схему плоского рычажного механизма для выявления взаимодействия его звеньев.
2.Выбрать масштабный коэффициент длин.
3.Перевести все заданные геометрические параметры механизма, имеющие размерность длин (м), в масштабный коэффициент.
4.По полученным значениям в выбранном масштабном коэффициенте определить крайние (граничные) положения выходного(ых) звена(ьев).
5.Построить кинематические схемы механизма для обоих крайних (граничных) положений выходного(ых) звена(ьев).
6.Считая одно из крайних положений начальным, построить план положений механизма для заданного количества положений ведущего (входного) звена.
7.Определить коэффициент неравномерности средней скорости и ход механизма.
8.Выявить положения ведущего звена механизма, в которых угол давления принимает максимальные и минимальные значения.
Задание 2
1.Проанализировать план положений плоского рычажного механизма.
2.Выбрать масштабные коэффициенты осей времени и пути.
3.Построить диаграмму пути.
4.Выбрать масштабный коэффициент оси аналога скорости.
5.Используя графическое дифференцирование диаграммы пути, построить диаграмму аналога скорости.
6.Выбрать масштабный коэффициент оси аналога ускорения.
7.Используя графическое дифференцирование диаграммы аналога скорости, построить диаграмму аналога ускорения.
8.Выявить значения углов положения ведущего (входного) звена, при которых скорость и ускорение характерной(ых) точки(ек) выходного(ых) звена(ьев) достигают минимума и максимума.
Задание 3
1.Проанализировать кинематическую схему плоского рычажного механизма.
2.Определить характерные точки механизма.
3.Выявить траектории движения всех характерных точек механизма.
64
4.Составить векторные уравнения, описывающие распределение скоростей между характерными точками механизма.
5.Выбрать масштабный коэффициент скоростей.
6.Решая векторные уравнения, построить план скоростей для заданного положения ведущего (входного) звена.
7.Определить значения скоростей характерных точек, а также величины и направления действия угловых скоростей всех звеньев механизма для заданного положения ведущего (входного) звена.
Задание 4
1.Проанализировать кинематическую схему плоского рычажного механизма.
2.Составить векторные уравнения, описывающие распределение ускорений между характерными точками механизма
3.Выбрать масштабный коэффициент ускорений.
4.Решая векторные уравнения, построить план ускорений для заданного положения ведущего (входного) звена.
5.Определить значения ускорений характерных точек, а также величины и направления действия угловых ускорений всех звеньев механизма для заданного положения ведущего (входного) звена.
После выполнения всех пунктов задания практической работы необхо-
димо оформить |
отчет в соответствии с предъявляемыми требованиями |
и подготовиться |
к ее защите. |
Контрольные вопросы
1.Назовите цели и задачи кинематического анализа плоских рычажных механизмов.
2.Какие методы кинематического анализа механизмов вы знаете?
3.Поясните отличия графоаналитических методов кинематического анализа плоских рычажных механизмов.
4.Дайте определение понятия «план положений механизма» и поясните принцип его построения.
5.Как рассчитывается значение масштабного коэффициента плана положений механизма?
6.Какие положения выходного(ых) звена(ьев) называются «крайними» (граничными) положениями и как их определить?
7.Дайте определение понятий «коэффициент неравномерности средней скорости» и «ход механизма». Как определить их значения?
8.Поясните суть метода кинематических диаграмм.
65
9.Как определить значения масштабных коэффициентов осей времени, пути, аналогов скорости и ускорения?
10.Поясните суть и отличия графического дифференцирования и графического интегрирования.
11.Поясните суть метода кинематических планов.
12.Как построить план скоростей?
13.Как построить план ускорений?
14.Поясните принцип определения значений и направлений действия угловых скоростей звеньев механизма.
15.Поясните принцип определения значений и направлений действия угловых ускорений звеньев механизма.
16.Дайте формулировку теоремы подобия и поясните область ее применения.
17.В чем заключаются отличия метода кинематических диаграмм и метода планов?
18.Охарактеризуйте метод замкнутых векторов (метод Зиновьева).
19.Аналитический метод кинематического расчета на примере криво- шипно-ползунного механизма.
66
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ 3. СИЛОВОЙ РАСЧЕТ РЫЧАЖНОГО МЕХАНИЗМА
Цель работы
Изучить виды и методы построения динамических моделей механизмов, а также научиться составлять и определять основные параметры динамических моделей плоских рычажных механизмов.
3.1. Краткие теоретические сведения
Раздел «Динамика» предполагает изучение процессов или явлений, протекающих в технических системах под действием силовых факторов в функции времени, а также определение значений и закономерностей изменения динамических параметров исследуемой системы в функции времени. Динамические параметры любой технической системы делятся на две группы: силовые (силы и моменты пар сил) и инерциальные (массы и моменты инерции звеньев).
Исследование динамики технических систем выполняется по их динамическим моделям. Динамическая модель – это модель технической системы, предназначенная для исследования ее параметров в функции времени. К методам обеспечения эквивалентности динамической модели относятся: кинетостатический метод – это метод обеспечения эквивалентности динамической модели по отношению к состоянию технической системы, основанный на уравнениях силового равновесия; энергетический метод – это метод обеспечения эквивалентности динамической модели по отношению к состоянию технической системы, основанный на уравнениях энергетического равновесия.
В соответствии с методами обеспечения эквивалентности динамической модели в разделе «Динамика» различают два вида анализа технических систем: силовой и динамический.
Динамический анализ – это вид исследования подвижных технических систем, изучающий процессы, протекающие в этих системах под действием силовых факторов в функции времени. Задачами динамического анализа являются:
–определение закона движения технической системы при заданном управляющем силовом воздействии;
–определение требуемого управляющего силового воздействия, обеспечивающего заданный закон движения технической системы.
67
Силовой анализ – это вид исследования технических систем, изучающий процессы, имеющие место в этих системах под действием силовых факторов, исходя из условий статики.
Задачами силового анализа являются:
–определение значений и направлений действия уравновешивающей силы и уравновешивающего момента (управляющего силового воздействия);
–определение значений и направлений действия реакций связей кинематических пар.
Силовой анализ выполняется с использованием следующих методов: статического, кинетостатического и кинетостатического с учетом трения.
Статический – это метод силового анализа технических систем, базирующийся на уравнениях статического равновесия. Применяется при анализе технических систем, находящихся в покое или движущихся с малыми скоростями, а также в случаях, когда неизвестны массы и моменты инерции звеньев системы.
Кинетостатический – это метод силового анализа подвижных технических систем, основанный на принципе Даламбера, который имеет следующую формулировку: если к внешним силовым факторам, действующим на звенья технической системы, добавить силы и моменты пар сил инерции, то данная система будет находиться в квазистатическом равновесии и силовой анализ этой системы можно выполнять с использованием уравнений кинетостатического равновесия. Применяется для анализа подвижных технических систем при известных массах и моментах инерции звеньев.
Кинетостатический с учетом трения – это метод силового анализа подвижных технических систем, базирующийся на уравнениях равновесия, составленных с учетом сил трения и моментов пар сил трения. Применяется для анализа подвижных технических систем при известных размерах и характеристиках материалов элементов кинематических пар.
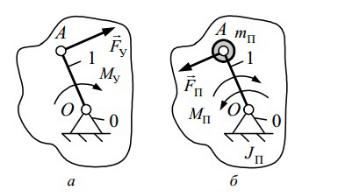
Независимо от вида анализа технической системы ее динамические модели составляются с помощью метода приведения, который позволяет задачу о движении системы звеньев свести к более простой задаче о движении одного звена и подвижной точки этого звена. Данное звено называется звеном приведения, а его подвижная точка – точкой приведения. В качестве звена приведения рекомендуется выбирать ведущее звено, а за точку приведения – подвижную точку этого звена (рис. 3.1, а).
Динамическая модель для силового анализа (рис. 3.1, а) составляется c использованием кинетостатического метода, согласно которому для сохранения эквивалентности модели по отношению к состоянию технической системы достаточно учесть только силовые параметры, т.е. силы и моменты пар сил. При этом все силовые факторы, действующие на подвижные звенья
68
технической системы, заменяются одной силой, которая называется уравновешивающей силой.
Рис. 3.1. Динамические модели технических систем
Уравновешивающая сила Fy – это теоретическая сила, действующая на звено приведения с целью обеспечения заданного закона движения.
Вектор уравновешивающей силы прикладывается к точке приведения, а линия его действия является перпендикуляром к оси звена приведения, и вектор этой силы направлен по движению звена приведения. Наличие уравновешивающей силы на звене приведения служит причиной возникновения уравновешивающего момента пары сил:
My = Fy · lп,
где lп – расстояние между точкой приведения и осью вращения звена приведения (длина звена приведения), м.
Уравновешивающий момент пары сил Mу – это момент теоретической пары сил, действующих на звено приведения с целью обеспечения заданного закона движения.
Динамическая модель для динамического анализа (рис. 3.1, б) составляется c использованием энергетического метода, согласно которому для сохранения эквивалентности модели по отношению к состоянию технической системы необходимо учесть силовые и инерционные параметры. При этом все силовые факторы, действующие на ведомые звенья технической системы, заменяются одной силой, которая называется приведенной.
Приведенная сила – это теоретическая сила, которая вынуждает звено приведения развивать мгновенную мощность, равную сумме мгновенных мощностей, развиваемых приводимыми силами:
n
Ni
Fп |
= |
i=1 |
, |
|
|||
|
|
Vп |
|
69

n
где Ni – сумма мгновенных мощностей, развиваемых приводимыми си-
i=1
лами, Н; Vп – скорость точки приведения, м/с; n – количество приводимых звеньев технической системы.
Вектор приведенной силы прикладывается к точке приведения, направлен против движения звена приведения, а линия его действия является перпендикуляром к оси звена. Наличие приведенной силы на звене приведения служит причиной возникновения приведенного момента пары сил:
Mп = Fп · lп.
Приведенный момент пары сил – это момент теоретической пары сил, который вынуждает звено приведения развивать мгновенную мощность, равную сумме мгновенных мощностей, развиваемых приводимыми силами:
n
Ni
Мп = i=ω1 п ,
где ωп – угловая скорость звена приведения, с–1.
Сумма мгновенных мощностей, развиваемых приводимыми силами, рассчитывается по формуле
n |
f |
|
|
|
|
m |
Ni = (Fi |
|
|
|
|
|
|
Vi cos(Fi |
,Vi )) + (Mi ωi ), |
|||||
i=1 |
i=1 |
|
|
|
|
i=1 |
здесь ωi – угловая скорость i-го звена; f, m – соответственно количество внешних сил и внешних моментов пар сил, действующих на ведомые звенья.
Каждое звено технической системы обладает массой, следовательно, массы всех приводимых звеньев заменяют приведенной массой.
Приведенная масса – это теоретическая масса, прикладываемая к точке приведения и обладающая кинетической энергией, равной удвоенной сумме кинетических энергий приводимых звеньев:
n
2 Ti
mп = i=12
Vп
n
где Ti – сумма кинетических энергий приводимых звеньев.
i=1
Приведенная масса прикладывается в точку приведения и является причиной возникновения приведенного момента инерции:
Jп = mп · lп2.
70