ψ0 ; А5 – решение системы (10), определение θ, s ; А6 – печать результатов; А7 – вычисление ψ, φ, θ, s для следующего момента времени согласно (15); А9 – конец работы.
А1  А2
А2  А3
А3  А4
А4  А5
А5  А6
А6  А7
А7  А8
А8  А9
А9
Рис. 3. Блок-схема описанного алгоритма
Применение уравнений Лагранжа II рода
к определению сил и моментов, обеспечивающих программное движение манипулятора
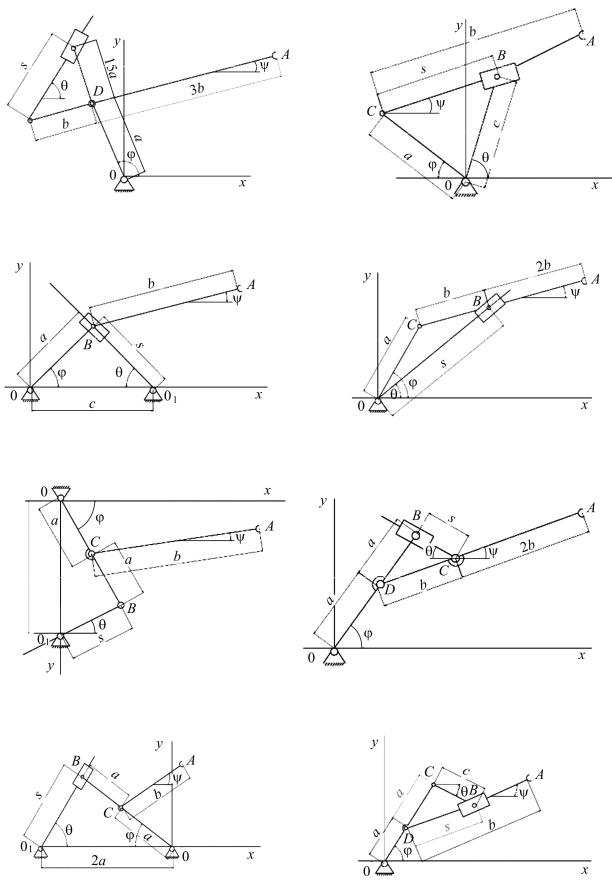
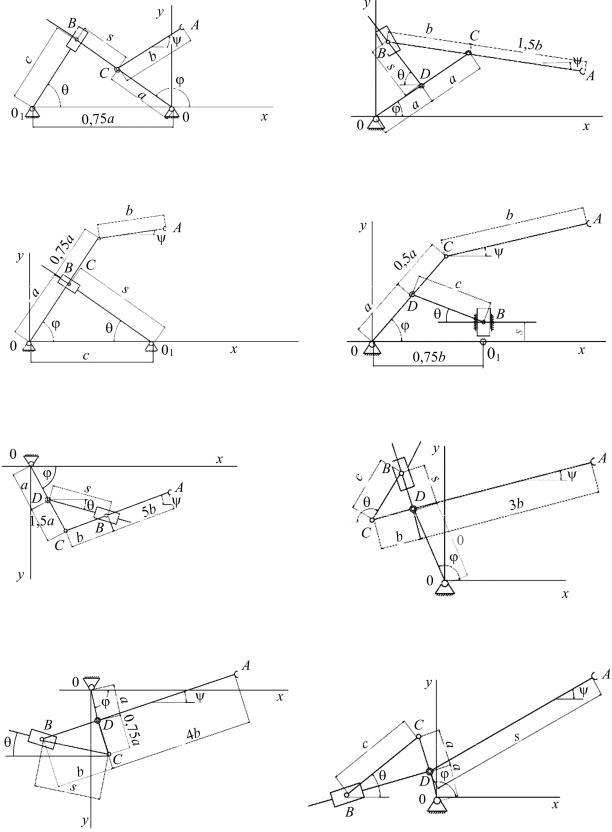
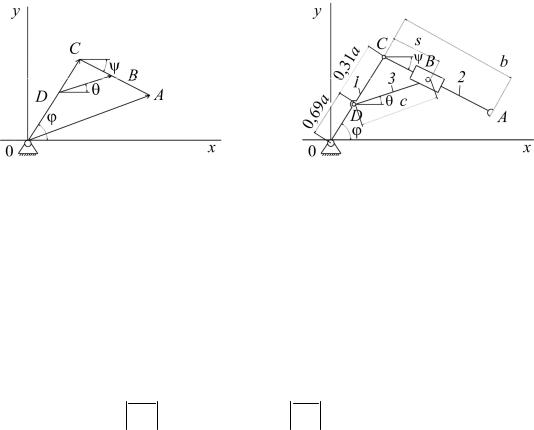
Манипулятор, состоящий из звеньев 1, 2 и захвата D, приводится в движение приводами А и В (см. чертежи для выполнения задания). Захват D перемещается вдоль прямой ON. Со стороны привода А к звену 1 прикладывается либо управляющий момент МА (варианты 2, 4, 7, 8, 12, 22, 24–26, 29),
либо управляющее усилие PA (варианты 1, 3, 5, 6, 9–11, 13–21, 23, 27, 28, 30).
Привод В воздействует на звено 2 моментом МВ(варианты 1–3, 5, 6, 8–11, 13–21, 23, 27) либо управляющим усилием РВ (варианты 4, 7, 12, 22, 24–26, 28–30).
Перемещение звена 1 (варианты 3, 4, 7, 12, 22, 24–26, 28–30) или звена 2 (варианты 1, 2, 5, 6, 8–11, 13–21, 23, 27) манипулятора ограничено препятствиями K и L, поэтому изменение угла поворота φ = φ(t) этого звена возмож-
но лишь в интервале φ(0),φ(τ) , где τ – время движения звена.
Технические условия работы манипулятора требуют, чтобы указанное звено сошло со связи K при t ≤ 0 и «мягко» коснулось препятствия L при t = τ, т.е. так, чтобы были удовлетворены условия
d |
φ(t ) |
|
|
= 0 ; |
d 2 |
φ(t ) |
= 0. |
|
|
|
|
|
d 2t |
dt |
|
t=0,t=τ |
|
|
t=0,t=τ |
|
|
|
|
|
|
Программные движения звена 1, удовлетворяющие требованиям звена «мягкого» касания, приняты в таком виде:
1) φ(t ) = φ(0) + φ(τ) − φ(0) − |
10 − 15 |
t |
+ |
6t2 t3 |
|
|
2 |
|
|
3 |
|
|
|
τ |
|
τ |
τ |
|
|
|
|
|
|
|
(варианты 2, 4, 6, 7, 11, 12, 16, 19, 22, 24–26, 28–30);