

2760.Практикум по теории механизмов и механике систем машин
..pdfСолнечное колесо в схемах планетарных механизмов (см. рис. 5.4, а–в) представлено подвижным звеном 1, а на схеме (см. рис. 5.4, г) оно отсутствует. При этом схема планетарного механизма (см. рис. 5.4, в) помимо подвижного солнечного колеса 1 содержит и неподвижное солнечное колесо 4. Короной в схемах планетарных механизмов (см. рис. 5.4, а, б, г) является неподвижное колесо 4, а на схеме (см. рис. 5.4, в) корона отсутствует. При этом схема планетарного механизма (см. рис. 5.4, г) помимо неподвижной короны 4 содержит и подвижную корону 1. Сателлитом в планетарных механизмах является подвижное колесо 2. В схеме (см. рис. 5.4, а) сателлит представлен одним колесом, а в схемах (см. рис. 5.4, б–г) это блок зубчатых колес 2 и 3. Водило во всех схемах планетарных механизмов представлено в виде рычажной системы H и предназначено для установки сателлитов и обеспечения вращательного движения этих звеньев как вокруг собственной оси вращения, так и вокруг оси вращения водила Н.
Структурный анализ. Все схемы планетарных механизмов образованы последовательным соединением простых зубчатых механизмов, которые являются плоскими. Следовательно, для определения подвижности данного механизма воспользуемся формулой Чебышева.
Согласно схеме все планетарные механизмы состоят из стойки 0, трех подвижных звеньев – 1, 2 и Н.
Подставив значения коэффициентов в формулу Чебышева, получим
W = 3 · 3 – 2 · 3 – 2 = 1.
Корона 4 неподвижна, следовательно, угловая скорость этого звена равна нулю, т.е. 0 4 = ω, тогда формула Виллиса примет вид
iH |
= |
ω1 − ωH |
= |
ω1 − ωH = 1− i4 . |
|
|
|||||
14 |
|
ω4 − ωH |
0 − ωH |
1H |
|
Преобразовав данное выражение, получим
i14H = 1− i14H ,
где i14H – внутреннее передаточное отношение планетарного механизма.
Внутреннее передаточное отношение однорядного планетарного зубчатого механизма (рис. 5.5, а) найдем по формуле
i14H = i12 i24 |
= − |
z2 |
|
+ |
z4 |
= − |
z4 |
. |
|
|
|
||||||
|
|
z1 |
|
z2 |
z1 |
|||
С учетом внутреннего передаточного отношения формула для прямого передаточного отношения примет вид
121

i14H =1+ z4 .
z1
Однорядный планетарный зубчатый механизм является реверсивным и может работать в режиме редуктора и в режиме мультипликатора, следовательно, для данного механизма характерно наличие обратного передаточного отношения (см. рис. 5.5):
4 |
= |
|
1 |
= |
1 |
|
|
= |
z1 |
|
. |
||
iH1 |
|
|
|
|
|
|
|
|
|
||||
i |
4 |
1+ |
|
z4 |
|
z + z |
|
||||||
|
|
1H |
|
|
|
1 |
4 |
|
|||||
|
|
|
|
z1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
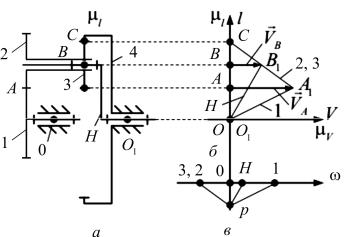
Рис. 5.5. Планы скоростей для однорядного планетарного зубчатого механизма
Для выявления соотношений линейных и угловых скоростей звеньев однорядного планетарного зубчатого механизма, используя графоаналитический способ, построим планы линейных и угловых скоростей. Для построения плана линейных скоростей выберем характерные точки О, А, В, С, О1 (рис. 5.5, а). Отложим отрезок АА1. Соединив точку А1 с точкой О, получим годограф скоростей точек, принадлежащих солнечному колесу 1, а с точкой С – годограф скоростей точек, принадлежащих сателлиту 2. На пересечении годографа сателлита 2 с прямой ВВ находится точка В1. Отрезок ВВ1 является вектором скорости точки В, принадлежащей сателлиту 2. Соединив точку В1 с точкой О1, получим годограф для точек водила Н. Построенная картина является планом линейных скоростей (рис. 5.5, б). Перенеся все годографы таким образом, чтобы они проходили через точку р, являющуюся полюсом плана, получим план угловых скоростей (рис. 5.5, в).
Кинематический анализ двухрядного планетарного зубчатого механизма с одним внешним и одним внутренним зацеплением (рис. 5.6). Корона
122
4 неподвижна, следовательно, угловая скорость этого звена равна нулю, т.е. ω4 = 0, тогда формула Виллиса примет вид
iH |
= |
ω1 − ωH |
= |
ω1 − ωH = 1− i4 . |
|
|
|||||
14 |
|
ω4 − ωH |
0 − ωH |
1H |
|
Преобразовав данное выражение, получим
i14H = 1− i14H ,
где i14H – внутреннее передаточное отношение планетарного механизма.
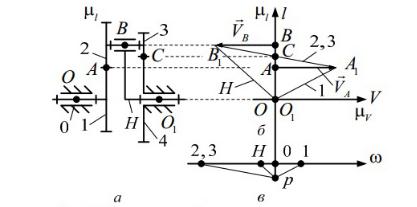
Рис. 5.6. Планы скоростей для однорядного планетарного зубчатого механизма
Внутреннее передаточное отношение двухрядного планетарного механизма с одним внешним и одним внутренним зацеплением (рис. 5.6, в) определим по формуле
|
|
|
z |
2 |
|
|
z |
4 |
|
|
z |
2 |
z |
4 |
|
i14H = i12 i34 |
= |
− |
|
|
+ |
|
|
= − |
|
|
. |
||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
z1 |
|
z3 |
|
z1 z3 |
||||||||
С учетом внутреннего передаточного отношения формула для прямого передаточного отношения примет вид
i4 |
= 1+ |
z2 z4 |
. |
|
|||
1H |
|
z1 z3 |
|
|
|
||
Двухрядный планетарный зубчатый механизм с одним внешним и одним внутренним зацеплением (рис. 5.6, а) является реверсивным и может работать в режиме редуктора и в режиме мультипликатора, следовательно, для данного механизма характерно наличие обратного передаточного отношения:
123
4 |
= |
|
1 |
= |
|
|
1 |
|
|
= |
|
z1 z3 |
|
|
. |
||
iH1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
i |
4 |
1+ |
z2 |
z4 |
|
z |
z |
+ z |
|
z |
|
||||||
|
|
1H |
|
|
|
1 |
3 |
|
2 |
|
4 |
|
|||||
|
|
|
z1 |
z3 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для выявления соотношений линейных и угловых скоростей звеньев двухрядного планетарного зубчатого механизма, используя графоаналитический способ, построим планы линейных (рис. 5.6, б) и угловых (рис. 5.6, в) скоростей.
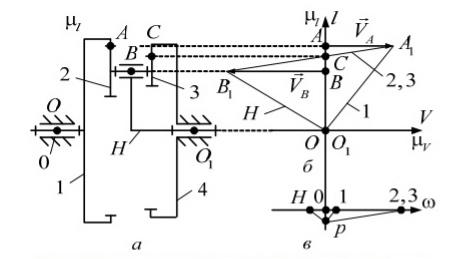
Кинематический анализ двухрядного планетарного зубчатого механизма с двумя внешними зацеплениями (рис. 5.7).
Рис. 5.7. Планы скоростей для двухрядного планетарного зубчатого механизма с двумя внешними зацеплениями
Звено 4 неподвижно, следовательно, угловая скорость этого звена равна нулю, т.е. ω4 = 0. В этом случае формула Виллиса примет вид
iH |
= |
ω1 − ωH |
= |
ω1 − ωH = 1− i4 . |
|
|
|||||
14 |
|
ω4 − ωH |
0 − ωH |
1H |
|
Преобразовав данное выражение, получим
i14H = 1− i14H ,
где i14H – внутреннее передаточное отношение планетарного механизма. Внут-
реннее передаточное отношение двухрядного планетарного зубчатого механизма с двумя внешними зацеплениями (рис. 5.7, а) рассчитаем по выражению
i4 |
= 1+ |
z2 z4 |
. |
|
|||
1H |
|
z1 z3 |
|
|
|
||
Двухрядный планетарный зубчатый механизм с двумя внешними зацеплениями является реверсивным и работает в режиме редуктора и в режиме
124
мультипликатора, следовательно, для данного механизма характерно наличие обратного передаточного отношения (рис. 5.7, а):
4 |
= |
|
1 |
= |
|
|
1 |
|
|
= |
|
z1 z3 |
|
|
. |
||
iH1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
i |
4 |
1− |
z2 |
z4 |
|
z |
z |
− z |
|
z |
|
||||||
|
|
1H |
|
|
|
1 |
3 |
|
2 |
|
4 |
|
|||||
|
|
|
z1 |
z3 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Двухрядный планетарный зубчатый механизм с двумя внутренними зацеплениями является реверсивным и может работать в режиме редуктора или в режиме мультипликатора, следовательно, для данного механизма характерно наличие обратного передаточного отношения (рис. 5.8, а):
4 |
= |
|
1 |
= |
|
|
1 |
|
|
= |
z1 z3 |
|
|
. |
|
iH1 |
|
|
|
|
|
|
|
|
|
|
|
||||
i |
4 |
1− |
z2 |
z4 |
|
z z − z |
|
z |
|
||||||
|
|
1H |
|
|
|
|
|
1 3 |
2 |
|
4 |
|
|||
|
|
|
z1 |
z3 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 5.8. Планы скоростей для двухрядного планетарного зубчатого механизма с двумя внутренними зацеплениями
Для выявления соотношений линейных и угловых скоростей звеньев двухрядного планетарного зубчатого механизма, используя графоаналитический способ, построим планы линейных (рис. 5.8, б) и угловых (рис. 5.8, в) скоростей.
5.6. Дифференциальные зубчатые механизмы
Дифференциальный зубчатый механизм – это эпициклический зубчатый механизм с подвижностью больше единицы.
Схемы типовых дифференциальных зубчатых механизмов можно получить, если в типовых схемах планетарных механизмов (см. рис. 5.4) разрешить перемещаться звену 4 (неподвижное звено). Дифференциальные зубча-
125
тые механизмы, или дифференциалы, относятся к разновидностям механизмов с несколькими входными или выходными звеньями.
Взависимости от соотношения количества входных и выходных звеньев дифференциалы делятся на суммирующие и разделяющие.
Суммирующий зубчатый дифференциал – это дифференциальный зубчатый механизм, в котором несколько входных потоков механической энергии суммируются в один выходной поток. Структура суммирующих дифференциалов имеет несколько входных звеньев и одно выходное звено.
Разделяющий зубчатый дифференциал – это дифференциальный зубчатый механизм, в котором входной поток механической энергии разделяется в несколько выходных потоков. Разделяющие дифференциалы имеют одно входное звено и несколько выходных. Разделяющие дифференциалы применяются в транспортных машинах с целью обеспечения разных скоростей вращения колес при движении по криволинейной траектории.
Взависимости от обеспечиваемого соотношения значений силовых факторов, действующих на выходные звенья, разделяющие дифференциальные зубчатые механизмы делятся на симметричные и несимметричные.
Симметричный зубчатый дифференциал – это дифференциальный зубчатый механизм, обеспечивающий движение выходных звеньев с разными скоростями при сохранении равенства силовых факторов, действующих на эти звенья. Несимметричный зубчатый дифференциал – это дифференциальный зубчатый механизм, обеспечивающий движение выходных звеньев
сразными скоростями при неравенстве силовых факторов, действующих на эти звенья.
Симметричные дифференциалы устанавливают между звеньями, имеющими общую ось вращения, а несимметричные дифференциалы располагают между звеньями транспортных машин, воспринимающих неодинаковые силовые факторы.
5.7. Суммирующие дифференциальные зубчатые механизмы
Суммирующий дифференциальный зубчатый механизм (рис. 5.9) имеет одно входное звено (колесо 1) и два выходных звена (корона 4 и водило H).
Структурный анализ. Схема механизма (рис. 5.9, а) имеет четыре подвижных звена – 1, 2, 4 и H. Следовательно, n = 4. Стойка 0 представлена тремя шарнирно-неподвижными опорами. Дифференциал содержит четыре одноподвижные кинематические пары (0–1, 2–Н, Н–0, 4–0) и две высшие кинематические пары (1–2, 3–4) с подвижностью, равной двум, тогда p1 = 4, а p2 = 2.
Подставив значения коэффициентов в формулу Чебышева, получим
126
W = 3 · n – 2 · p5 – p4 = 3 · 4 – 2 · 4 – 2 = 2.
Следовательно, для однозначного определения взаимного расположения звеньев дифференциального зубчатого механизма (рис. 5.9, а) достаточно двух обобщенных координат.
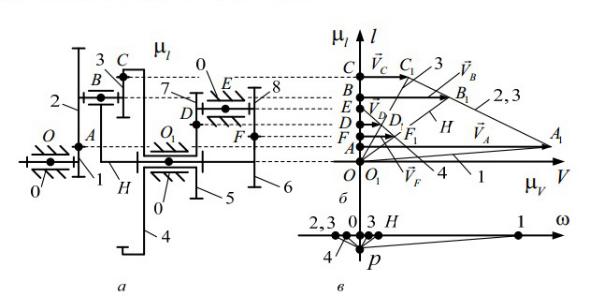
Рис. 5.9. Планы скоростей для замкнутого дифференциала
Кинематический анализ. Для построения плана линейных скоростей в выбранном масштабном коэффициенте отложим отрезки AA1 и CC1, изображающие векторы скоростей точек А и C (рис. 5.9, б), принадлежащие ведущим звеньям 1 и 4. Годографы скоростей точек, принадлежащих звеньям 1 и 4, получим путем соединения точек A1 и C1 с точкой O. Соединив точки A1 и C1 между собой, найдем годограф скоростей для точек звена 2. Используя свойство годографов, на пересечении отрезка C1A1 с прямой BB определим положение точки B1. Полученный отрезок B1B является вектором скорости точки B, принадлежащей сателлиту 2. Соединив точку B1 с точкой O1, лежащей на геометрической оси водила H, получим годограф скоростей точек, принадлежащих этому звену. Полученная картина (рис. 5.9, б) и будет являться планом линейных скоростей двухрядного дифференциального зубчатого механизма (рис. 5.9, а).
Для построения плана угловых скоростей двухрядного дифференциального зубчатого механизма спроецируем годографы скоростей звеньев 1, 2, 4 и H на ось угловых скоростей. Для этого перенесем годографы скоростей таким образом, чтобы они проходили через полюс плана (точку p). Полученная картина (рис. 5.9, в) и будет являться планом угловых скоростей двухрядного дифференциального зубчатого механизма.
127
5.8. Разделяющие дифференциальные зубчатые механизмы
Для разделяющих дифференциальных механизмов характерно наличие неопределенности движения выходных звеньев. Для исключения неопределенности движения выходных звеньев схему разделяющего дифференциала как бы «замыкают». Для образования замкнутой схемы необходимо функционально связать между собой выходные звенья. Полученный механизм называется замкнутым дифференциалом (см. рис. 5.9).
Замкнутый зубчатый дифференциал – это дифференциальный механизм, в котором выходные звенья соединены друг с другом замыкающей передачей с неподвижными осями вращения колес.
Замкнутые дифференциалы являются многопоточными механизмами, что позволяет реализовать большие передаточные числа при высоком КПД.
Структурный анализ. Структура замкнутого дифференциального механизма (см. рис. 5.9) имеет пять подвижных звеньев – 1, 2–3, 4–5, 7–8 и H–6. Следовательно, n = 5. Стойка 0 с подвижными звеньями образует пять одноподвижных кинематических пар (0–1, 2–Н, Н–0, 4–0, 7–0) и четыре высших кинематических пары (1–2, 3–4, 5–7, 8–6) с подвижность, равной двум, тогда p1 = 5, а p2 = 4. Подставив выявленные значения коэффициентов в формулу Чебышева, будем иметь
W = 3 · n – 2 · p5 – p4 = 3 · 5 – 2 · 5 – 4 = 1.
Следовательно, для однозначного определения взаимного расположения звеньев замкнутого дифференциального зубчатого механизма (см. рис. 5.9, а) достаточно одной обобщенной координаты.
Кинематический анализ. Для определения передаточного отношения замкнутого дифференциала разделим схему механизма на дифференциальную и замыкающую части. Передаточное отношение дифференциальной части механизма с использованием формулы Виллиса примет вид
iH |
= |
ω1 − ωH |
= − |
z2 z4 |
. |
||||
ω |
|
− ω |
|
|
|||||
14 |
|
4 |
H |
|
z |
z |
|||
|
|
|
|
1 |
3 |
|
|||
Передаточное отношение замыкающей части определяем следующим образом:
i = |
ω6 |
= − |
z7 z6 |
. |
||
ω |
|
|
||||
56 |
5 |
|
z |
z |
||
|
|
5 |
8 |
|
||
С учетом равенств ω5 = ω3 иω6 = ωH приведем выражение к виду
ω |
|
= −ω |
|
z7 |
z6 |
. |
H |
5 z |
|
||||
|
|
z |
||||
|
|
|
5 |
8 |
|
|
128
Подставляя последнее равенство в выражение для передаточного отношения дифференциальной части, получим
i14 = |
ω |
= − |
z |
7 |
z |
6 |
− |
z |
2 |
z |
4 |
|
+ |
z |
7 |
z |
6 |
|
1 |
|
|
|
|
1 |
|
|
. |
||||||||||
ω4 |
z5 z8 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
z1 z3 |
|
z5 z8 |
|||||||||||||
Взаимосвязь линейных и угловых скоростей подвижных звеньев замкнутого дифференциального механизма наглядно характеризуется при помощи планов линейных (рис. 5.9, б) и угловых скоростей (рис. 5.9, в).
5.9. Коробки передач
Все сложные зубчатые механизмы рассмотренных видов относятся к механизмам с постоянным передаточным отношением. Однако существует множество машин и устройств, требующих наличия возможности изменения передаточного числа в процессе его работы в требуемых пределах. Механизмы, обладающие подобными возможностями, называются коробками скоростей или передач.
Коробка передач – это сложный зубчатый механизм, обладающий возможностью изменения передаточного отношения в требуемом диапазоне.
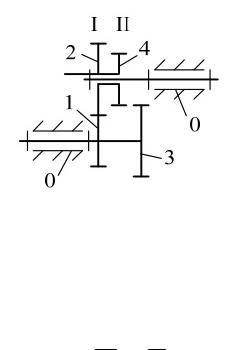
Типовая коробка передач состоит из двух рядов зубчатых колес с наличием возможности перемещения блока зубчатых колес 2 и 4 вдоль геометрической оси (рис. 5.10).
Рис. 5.10. Схема коробки передач
В зависимости от ряда колес, находящихся в зацеплении, типовая коробка имеет два значения передаточного отношения:
для ряда I
i12 = ω1 = − z2 ; ω2 z1
129

для ряда II
i34 = ω3 = − z4 . ω4 z3
Изменение передаточного отношения в более широком диапазоне можно реализовать в коробках, построенных на основе планетарных или дифференциальных механизмов. Для образования коробки в схему планетарного механизма или дифференциала вводятся управляющие устройства, в качестве которых выступают муфты M и тормоза T. Дифференциальные коробки обладают возможностью изменения передаточного отношения без разрыва потока механической энергии при малых габаритах.
5.10. Проектирование одноступенчатых планетарных зубчатых передач
В качестве примера приведем последовательность определения основных параметров, т.е. чисел зубьев, числа сателлитов и радиусов начальных окружностей, для одноступенчатого планетарного однорядного редуктора типа Джеймса (рис. 5.11).
Рис. 5.11. Схема одноступенчатого планетарного редуктора Джеймса
Для получения однозначного решения вводятся следующие ограничения:
1)зубчатые колеса 1 и 2, а также колеса 2 и 3 (см. рис. 5.11) должны образовать неисправленное (нормальное) зацепление;
2)угол зацепления в сборке αсб = 20° и высота головок зубьев hг = m;
3)при зацеплении зубчатых колес не должно быть их заклинивания, причем условие отсутствия заклинивания заключается в том, что
а) для внешнего зацепления число зубьев на меньшем колесе не должно быть меньше, чем
130