

2760.Практикум по теории механизмов и механике систем машин
..pdfУгловая скорость кривошипа может быть найдена по формуле
ω = π nAB = ω1 = const.
AB 30
Скорость точки В: VB = ω1 lAB . Вектор скорости VВ перпендикулярен
звену АВ схемы и направлен в сторону вращения кривошипа АВ.
На чертеже выбираем произвольно точку р – полюс. Vp = 0. Из точки р проводим вектор pb , изображающий скорость точки В (см. рис. 2.3, б). Длина отрезка рb выбирается произвольно, но такой, чтобы масштаб плана
скоростей μ |
= V |
/ ( pb) = ω l / ( pb), |
|
мс−1 /мм, выражался простым числом. |
||||||||||||
V |
B |
1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Затем для структурной группы 21 записываем векторные уравнения |
||||||||||||||||
скоростей. Скорости концевых элементов группы |
|
и |
|
= 0 известны: |
||||||||||||
VВ |
VD |
|||||||||||||||
|
|
|
|
= |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
V |
V |
|
|
|
|
|||||||||
|
|
|
+ V |
|
|
|
|
|
||||||||
|
|
С |
|
B |
|
|
|
CB |
|
(2.1) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
= V |
|
|
|
|
|
|
||||||||
|
|
V |
|
|
|
|
|
, |
|
|
|
|
||||
|
|
|
+ V |
|
|
|
|
|
||||||||
|
|
С |
|
D |
|
|
|
CD |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где V CB – вектор относительной скорости точки С в ее движении относительно точки В; VCD – вектор относительной скорости точки С вокруг D.
Величины этих векторов неизвестны. По направлению V CB CB, VCD CD . Исходя из этого, согласно первому уравнению системы (2.1), из
точки b проводим луч соответственно перпендикулярно звену CB схемы, а согласно второму уравнению (2.1) из точки p – луч перпендикулярно СD.
Пересечение лучей дает точку С – конец вектора VС . Точку С соединяем с полюсом p (см. рис. 2.3, б).
|
|
|
|
|
VC = ( pc)μV ; VCB = (cb)μV ; VCD = (cd)μV = VC . |
||||||||
Положение точки S схемы определяем на плане скоростей из пропор- |
|||||||||||||
ции |
BC |
= |
lBC |
= |
bc |
по свойству подобия. Соединив S с полюсом p, получим |
|||||||
|
|
|
|||||||||||
|
BS lBS |
|
bs |
|
|
|
|
|
|
|
|||
величину и направления скорости точки S: VS = ( ps)μV . |
|||||||||||||
Угловая скорость звеньев CB, СD: |
|
|
|
|
|
||||||||
|
|
|
|
|
|
ω = |
VCB |
= (cb)μV , ω = |
VCD |
= |
( pc)μV |
. |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
2 |
lCB |
lCB |
3 |
lCD |
|
lCD |
|||
|
|
|
|
|
|
|
|
|
|||||
41
Направление угловых скоростей ω2 и ω3 определяется прикладыванием
векторов V CB и V CD соответственно в точках С схемы (см. рис. 2.3, б). Угловая скорость ω2 вращает звено СВ относительно точки В против часовой стрелки, а угловая скорость ω3 вращает звено СD относительно точки D, также против часовой стрелки.
Построение плана ускорений начинаем с определения ускорения точки В при равномерном вращении aB = ω12l1 .
Вектор aB направлен параллельно звену АВ к центру вращения – точке А. На чертеже выбираем точку p2 – полюс. ap2 = aD = 0. Из точки p2
проводим вектор p2b , изображающий aB (см. рис. 2.3). Длина отрезка (p2b) выбирается произвольной, но такой, чтобы масштаб плана ускоре-
ний, мс−2 ,
мм
μa |
= |
a |
= |
ω2l |
= |
V 2 |
B |
1 1 |
B |
||||
|
|
( p2b) |
|
( p2b) |
|
( p2b)l1 |
выражался простым числом.
Векторное уравнение ускорений для структурной группы 21:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
n |
+ |
|
|
|
τ , |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
a |
a |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
B |
|
|
|
|
|
|
CB |
CB |
|
|
|
|
|
(2.2) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
CDτ , |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
+ |
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aC |
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
a |
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
где |
|
n |
– нормальное ускорение точки С относительно точки В, направлен- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
CB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ное вдоль СВ от С к В; |
|
n |
= ω2l |
|
|
= |
|
|
V |
2 |
|
|
|
|
|
|
|
τ – |
тангенциальное ускорение |
||||||||||||||||||||||||||||||||||||||||||
a |
2 |
|
|
|
|
|
CB |
; |
a |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CB |
|
|
|
2 |
|
|
|
|
|
|
|
lCB |
|
|
CB |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
точки С относительно В, |
направленное перпендикулярно СВ; |
|
n |
– нор- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
|
мальное ускорение точки С относительно точки D, направленное вдоль зве- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
на CD от C к |
D; |
|
n |
= |
V 2 |
= ω2 |
l ; |
|
|
|
τ |
|
|
|
|
– тангенциальное ускорение точки С |
|||||||||||||||||||||||||||||||||||||||||||||
a |
|
|
CD |
|
|
|
a |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
|
|
lCD |
|
|
|
|
3 |
3 |
|
|
|
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
относительно точки D, направленное перпендикулярно звену CD. |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Вектору |
|
|
|
|
|
n |
соответствует |
|
|
отрезок |
|
|
|
|
|
|
плана, |
длина |
|
которого |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Bn |
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
CB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||||||
(bn ) = an |
/ μ |
|
. |
|
|
Вектор |
|
|
n |
соответствует |
|
|
вектору |
|
плана |
с |
длиной |
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
p n |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
a |
|
|
a |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
1 |
|
|
CB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 2 |
|
|
|
|
|||||||
( p n ) = an |
|
/ μ |
a |
(см. рис. 2.3, в). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
2 2 |
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
42

С учетом уравнений системы (2.2), значений (bn1), (πn2 ) и их направлений достраиваем план ускорений. Соединив полученную точку С с полюсом p2, получим вектор p2c , соответствующий aC (см. рис. 2.3, в).
aC = (πc)μa ; aCBτ = (n1c)μa ; aCDτ = (n2c)μa .
Ускорение точки S находим, соединив точки c и b:
|
|
|
|
|
|
CS |
= |
CS |
, aS = ( p2s)μa . |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
CB |
|
|
|
|
|||||||||||
|
|
|
|
|
|
CB |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
Угловые ускорения звеньев 2 и 3: |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
aτ |
|
|
(n c)μ |
a |
|
aτ |
(n c)μ |
a |
|
|
|
||||||||
|
|
|
|
ε2 = |
CB |
= |
|
|
1 |
|
|
, ε3 = |
CD |
= |
2 |
. |
|
|
||||||
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
l3 |
|
|
|||||||||
|
|
|
|
|
lCB |
|
|
|
|
|
|
|
|
lCD |
|
|
|
|
||||||
|
|
|
Направление векторов |
ε |
|
иε |
|
определяется установкой векторов |
|
τ |
||||||||||||||
|
|
|
2 |
3 |
a |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CB |
|||
и |
|
τ |
|
в точку С схемы по способу, рассмотренному выше для угловых ско- |
||||||||||||||||||||
a |
|
|||||||||||||||||||||||
|
CD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ростей (см. рис. 2.3). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
2.7. Кривошипно-ползунный механизм АВС |
|
|||||||||||||||||||
|
|
|
Структурная формула: 1→22. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
Исходные данные: lAB = l1; lBC = l2; n1. |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
ω |
AB |
= |
πn1 |
|
= ω = const . |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
30 |
|
1 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Скорость точки В: VB = ω1l1. Вектор скорости VB перпендикулярен звену АВ схемы и направлен в сторону вращения кривошипа АВ.
По аналогии с примером (см. рис. 2.3, а) строим вектор pb .
Масштаб, |
мс−1 |
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μ = |
VB |
. |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
V |
( pb) |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Далее для структурной группы 22 составляем векторные уравнения |
||||||||||||||||||
скоростей. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
V |
|
|||||||||||||||
|
|
|
= V |
|
+ V , |
|
||||||||||||
|
|
|
C |
|
|
|
|
B |
|
|
CB |
|
(2.3) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VC |
|
= VC |
+ V |
CC |
, |
|||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
43
где VCB – вектор относительной скорости точки С вокруг точки В, V CB CB ; VC0 – скорость неподвижной точки направляющей х–х, совпа-
дающей в данный момент с точкой С, VC0 = 0 ; V CC0 – вектор относительной
скорости точки С в движении ее относительно направляющей, V CC0 – параллельный х–х, поэтому в соответствии с 1-м уравнением (2.3) из точки b проводим луч перпендикулярно звену CB схемы, а в соответствии со 2-м уравнением (2.3) из СХ проводим луч, параллельный х–х. На пересечении получается точка С, которая соединяется с полюсом р (см. рис. 2.3, а). В результате получают
V C = ( pc)μV ; V CB = (cb)μV ; ω2 = VCB = (cb)μV .
lCB lCB
Направление ω2 определяется по правилу, рассмотренному в примере (см. рис. 2.3, б). Скорость точки S находим, используя подобие из пропор-
ции (bs) = BS = lBC . Соединив полюс p с S, получим абсолютную скорость
(bc) BC lBS
точки S: VS = ( ps)μV (см. рис. 2.3, а).
Подробнее остановимся на определении скорости точки k (рис. 2.4). Для этого на плане скоростей строим треугольник ∆bkc ~∆BKC схемы.
При этом должна соблюдаться идентичность направлений обхода контура bkс как на плане, так и на схеме механизма:
Vk = ( pk μV ) . |
|
|
|
|
|
|
|
|
Переходим к построению плана ускорений. a |
|
= ω2l |
= |
VB2 |
. Вектор |
|
|
|
B |
a |
B |
||||||
|
||||||||
|
1 1 |
|
l1 |
|
|
|||
|
|
|
|
|
|
|
направлен по звену АВ от В к А. Отрезок (р1b) по аналогии с предыдущим примером (см. рис. 2.3, а) откладываем от полюса р1 (см. рис. 2.3, в). Мас-
штаб построения μa = |
a |
|
|
, |
мс−2 |
, где длина отрезка (р1b), мм, выбирается |
|||||||||||||||
B |
|
|
|
|
|
|
|||||||||||||||
( p1b) |
|
мм |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
произвольной, но удобной для дальнейших расчетов. |
|||||||||||||||||||||
Векторное уравнение для ускорений группы 21: |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
τ |
, |
|||
|
|
ac |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
= aB + aCB |
+ aCB |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.4) |
|
|
|
|
|
= |
|
C + |
|
|
|
+ |
|
|
|||||||||
|
|
|
|
|
|
|
CCk |
|
CCz , |
||||||||||||
|
|
ac |
a |
a |
a |
||||||||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
44
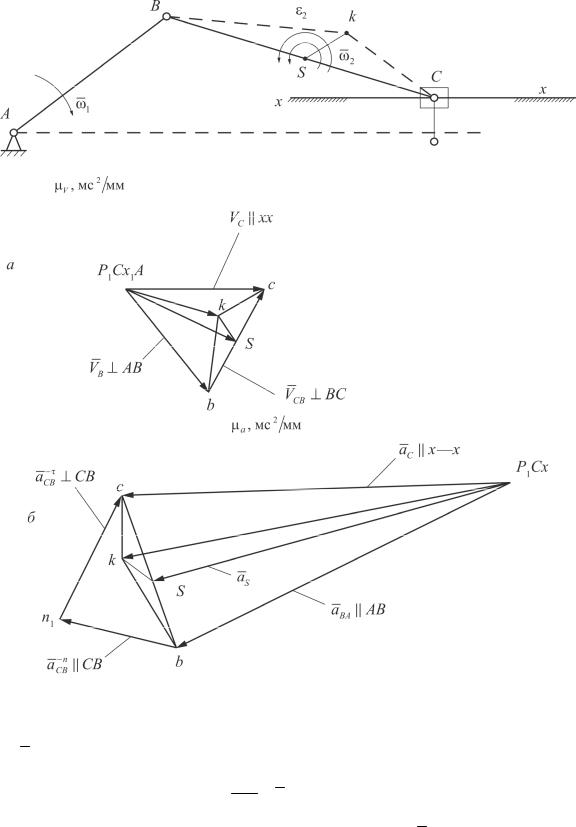
Рис. 2.4. Планы скоростей (а) и ускорений (б) для кривошипно-ползунного механизма
где aCBn – нормальное ускорение точки С относительно В, направленное
вдоль СВ от С к В, aCBn = ω22l2 = VCB2 ; aCBτ – тангенциальное ускорение точки С
lCB
относительно В, направленное перпендикулярно СВ; aС0 – ускорение точки неподвижной направляющей, совпадающей в данный момент с точкой С,
|
|
= 0 ; |
|
k |
– ускорение Кориолиса в движении точки С относительно |
|||||
|
a |
a |
||||||||
|
CX |
|
CC |
|
|
|
|
|
||
|
|
|
|
0 |
|
|
|
|
|
|
точки С |
Х |
и вместе с ней, ak |
= 2V |
ω |
xx |
= 2V 0 = 0. Вращательное дви- |
||||
|
|
|
|
|
CC |
CC |
|
CC |
||
|
|
|
|
|
|
0 |
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
45 |
z
жение направляющей х–х отсутствует (ωx− x = 0) ; aCC0 – относительное (релятивное) ускорение в движении точки CX , направлено вдоль направляющей х–х. aCBn соответствует отрезок bn1 , длина которого (bn1) = aCBn / μa .
С учетом 1-го уравнения системы (2.4) из точки b плана проводим bn1 параллельно ВС (от С к В), затем из точки n1 проводится луч, перпендикулярный BC (направление aCBτ ). По 2-му уравнению системы (2.4)
a |
= 0 = ak |
, из точки p2 проводим луч, параллельный х–х (направление |
|||
|
C |
|
CC |
0 |
|
0 |
|
|
|||
|
|
z |
|
). На пересечении лучей получается точка С, которая соответствует |
|
a |
|
||||
|
CC |
|
|
||
|
|
|
0 |
|
|
концу вектора p1c , характеризующего aC . По величине aC = ( p1c)μa далее:
aCBτ = (n1c)μa ; aCcxn = ( pc)μa ;
ε2 = aCBτ = (n1c)μa . l2 l2
Направление углового ускорения звена CB − ε2 устанавливается по
правилу, приведенному на рис. 2.4, б.
Ускорение точек S и К определяется из подобия по пропорции
BS |
|
l |
BS |
bs |
||
|
= |
|
= |
|
|
|
|
lBC |
|
||||
BC |
|
bc |
||||
по тому же принципу, что и при построении плана скоростей:
aS = ( p1s)μa , ak = ( p1k)μa .
2.8. Кулисный механизм АВС
Структурная формула: 1 → 232. Исходные данные: lAB = l1; lАC = l0; lCD = l3.
ω |
|
= |
π n1 |
= ω , 1 . |
|
3 |
|||
|
AB |
|
1 c |
Для данного механизма (рис. 2.5) рассматриваются точки В1, В2, В3, принадлежащие соответственно концу кривошипа, камню кулисы, самой кулисе и совпадающие в заданный момент времени:
VB1 = VB2 = ω1 lAB = ω1 l1.
46
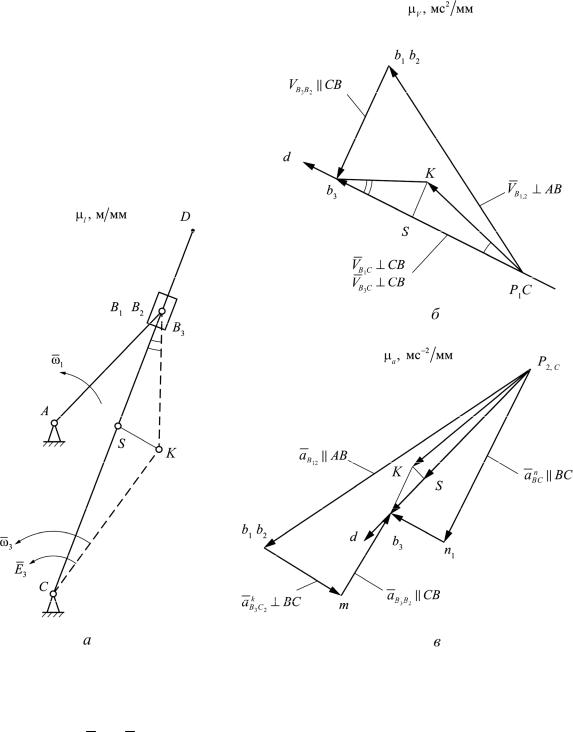
Рис. 2.5. Кинематическое исследование кулисного механизма: а – схема механизма; б – план скоростей; в – план ускорений
Вектор VB1 = VB2 перпендикулярен АВ и направлен в сторону вращения
этого звена. Из полюса р проводим вектор |
рb1 |
(рис. 2.5, а), соответствую- |
||||||
|
|
|
|
|
|
|
|
|
щий VB . |
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
||
|
|
μ = |
VB1 |
, |
мс−1 |
. |
|
|
|
|
|
|
|
|
|||
|
|
V |
( pb1) |
|
мм |
|
|
|
|
|
|
|
|
|
|||
47

Для структурной группы 23 векторное уравнение скоростей имеет вид
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
= V |
+ V , |
|
||||||||||||
|
|
|
|
B3 |
|
|
|
B2 |
|
|
B3B2 |
(2.5) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
VB3 |
= VС + VB3С, |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
– вектор относительной скорости точки B3 кулисы в движении от- |
||||||||||||||||||
где VB B |
|||||||||||||||||||||
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
носительно точки В2 камня кулисы, VB3B2 // В3С; VС = 0; VB3С B3С.
В соответствии с первым уравнением (2.5) из точки b2 плана скоростей проводим луч, параллельный кулисе В3С, а по второму уравнению системы (2.5) из полюса р проводим луч, перпендикулярный ВС (точки р и С совпадают, так как VС = Vp = 0 ).
На пересечении лучей находим точку b3, которая является концом вектора рb3 , VB3 = μV ( рb3 ) ;
VB3B1 = VB3B2 = μV (b3b1) = μV (b3b2 ).
Скорость точки D определяем из подобия
|
|
CD |
= |
pd |
pd = pb3 |
CD |
|
VD = μV ( pd) . |
||||||||||||||||||||||||
|
|
CB |
|
|
|
CB |
||||||||||||||||||||||||||
|
|
|
|
pb |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
3 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
Скорости точек S и K находятся по аналогии с примером: |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ω2 = 0, ω3 |
= |
VB3 |
= |
|
VB3 |
. |
||||||||||||||||||
|
|
|
|
|
|
|
|
lCB |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(CB3 )μl |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|||
Направление ω3 |
|
(рис. 2.5, а) находится по ранее введенному правилу. |
||||||||||||||||||||||||||||||
Полный план скоростей представлен на рис. 2.5, а. |
||||||||||||||||||||||||||||||||
Для плана ускорений |
|
B |
= |
|
|
|
B . |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
a |
a |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
По величине a |
B |
= a |
B |
= ω2 |
l = |
VB2 |
. |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
l1 |
|
|
|
|
|||||||||||
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Из полюса р2 плана ускорений параллельно АВ от схемы В к А откла- |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B1 |
|
|
|
мс−2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
(рис. 2.5, б). |
|||||||||||
дываем вектор р b = |
|
р b |
μ |
|
= |
|
|
, |
||||||||||||||||||||||||
|
|
|
|
рb |
мм |
|||||||||||||||||||||||||||
2 1 |
|
|
2 |
|
2 |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
Для структурной группы 23 векторные уравнения для ускорений запишутся следующим образом:
48
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
+ |
|
|
|
|
k |
+ |
|
|
|
|
τ |
, |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
a |
|
a |
|
a |
a |
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
B3 |
|
|
|
|
|
|
B2 |
|
|
|
|
|
|
B3B2 |
|
|
|
|
|
|
|
B3B2 |
|
|
|
(2.6) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
τ |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
+ |
|
|
+ |
|
|
|
, |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
a |
|
|
a |
|
|
|
a |
a |
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
B3 |
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
B3C |
|
|
|
|
B3C |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где |
|
Bk |
B – ускорение Кориолиса в движении точки В3 |
относительно В2 |
и |
|||||||||||||||||||||||||||||||||||||||||
a |
||||||||||||||||||||||||||||||||||||||||||||||
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
вместе с ней; |
|
Bτ |
B – относительное ускорение точки В3 |
вокруг С, |
направ- |
|||||||||||||||||||||||||||||||||||||||||
a |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ленное вдоль СВ от В к С; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
2 |
|
|
|
|
Bτ C – тангенциальное ускоре- |
||||||||||||||||||
|
Bn C = ω32lB C = |
|
B3 |
|
; |
|
||||||||||||||||||||||||||||||||||||||||
a |
|
a |
||||||||||||||||||||||||||||||||||||||||||||
lB C |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
3 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||
ние точки В3 относительно С, направленное перпендикулярно ВС. |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ak |
|
|
|
|
= 2V |
|
ω |
. |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B B |
|
|
|
|
|
|
B B |
|
3 |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
3 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Ему соответствует вектор |
|
, длина которого, мм, (b m) = ak |
|
/ μ |
|
. |
|||||||||||||||||||||||||||||||||||||||
|
b m |
|
a |
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
B B |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
|
|
|
|
Направление этого вектора определяется путем поворота на 90° в направле-
нии ω3 |
|
|
|
|
|
скоростей |
||
относительной скорости VB B (или b2b3 ) из плана |
||||||||
|
3 |
2 |
|
|
|
|
||
(рис. 2.5, а). В соответствии с первым уравнением системы (2.6) |
|
откла- |
||||||
b2m |
||||||||
дывается от точки b2, а затем из точки m проводим луч, параллельный В3С. По второму уравнению из точки С плана ускорений откладываем вектор cn1 параллельно ВС, направленный от В к С.
a n
(cn1) = μB3C .
a
Затем из точки n1 перпендикулярно ВС строится луч, соответствующий
направлению aBτ C . На пересечении двух лучей фиксируем точку b3, являю-
3
щуюся концом вектора р3b3 – ускорения точки b3. Следовательно:
aB3 = μa ( р3b3 ); aBz3B2 = μa (mb3 ); aBτ3C = μa (n1b3 ).
Из подобия
CD |
= |
р2d |
р3d = р3b3 |
CD |
aD = μa ( рd). |
|
CB |
р b |
CB |
||||
3 |
|
2 |
3 |
3 |
|
|
Ускорения точек S и K определяются из подобия с помощью принципа обхода контура СВK (см. рис. 2.5, б).
49

aS = μa ( pS); ak = μa ( pk).
Определяем угловое ускорение 3-го звена:
ε3 = aBτ3C = (n1b3 )μa ;
lB3C lB3C
направление ε3 показано на рис. 2.5, б.
Методики графоаналитического исследования, приведенные в примерах (см. рис. 2.5), применяются при кинематическом исследовании более сложных стержневых механизмов.
2.9. Алгоритмы кинематического анализа рычажных механизмов
2.9.1. Основные положения
Развитие математических методов и компьютерных технологий привело к широкому использованию аналитических методов исследования кинематики механизмов.
Сущность таких методов заключается в получении для кинематических характеристик аналитических выражений, содержащих алгебраические и тригонометрические операции. Аналитические методы, в отличие от графических и графоаналитических, позволяют провести исследования кинематики эффективно, с высокой степенью точности.
Для исследования кинематики рычажных механизмов наиболее широко используется метод векторных контуров, разработанный В.А. Зиновьевым. Согласно этому методу звенья механизма представляют в виде векторов, образующих замкнутый контур. Векторные уравнения замкнутых контуров проецируют на оси координат и получают системы алгебраических уравнений для определения параметров положения звеньев механизма: перемещений и углов поворота (задача о положениях). Последовательно дифференцируя эти зависимости, составляют уравнения для определения скоростей точек и угловых скоростей звеньев (задача о скоростях), а затем и ускорений точек и угловых ускорений звеньев (задача об ускорениях), в общем случае для рычажных механизмов алгоритм кинематического анализа для всего цикла движения представлен блок-схемой на рис. 2.6.
50