

2760.Практикум по теории механизмов и механике систем машин
..pdfКулачковый механизм с поступательно движущимся толкателем представлен на рис. 6.3; кулачковый механизм с возвратно-вращающимся толкателем – рис. 6.4, где звено 2 (толкатель) совершает возвратно-вращающееся движение с центром вращения в точке О2.
6.2. Рабочий процесс кулачкового механизма
Большинство механизмов используется в машинах и устройствах, имеющих цикловой характер работы. За цикл осуществляется определенная совокупность работ и процессов, в результате которых все параметры состояния системы повторяются, т.е. к концу цикла система приходит в точно такое же состояние, в котором она находилась в начале цикла.
Существуют разные виды циклов. Период времени, через который положения и направления скоростей точек всех звеньев механизма или системы механизмов повторяются, называют кинематическим циклом.
Период повторяющегося изменения мощности действующих сил и мо-
ментов сил называют энергетическим циклом.
Период повторяющейся совокупности операций технологической машины, в течение которого заканчивается изготовление детали или изделия,
называют рабочим циклом.
Изображение согласованности перемещений исполнительных звеньев механизма и состояния элементов управления в зависимости от времени на-
зывают графиком цикличности, или циклограммой. Используются также изображения, поясняющие взаимодействие и связи между отдельными механизмами и элементами управления. К ним относятся схемы процесса работы, мнемонические, структурные и функциональные схемы, диаграммы и циклограммы.
На основе этого анализа определяют время отдельных интервалов движения (рабочих и нерабочих перемещений, выстоев и т.п.), оценивают возможности совмещения технологических и транспортных операций, сокращения времени некоторых операций, совмещения операций друг с другом или разбивки операций на менее продолжительные переходы с целью уплотнить циклограмму, т.е. уменьшить время рабочего цикла и повысить производительность технологических машин.
В пределах каждого цикла различают такты или фазы, которые позволяют выделять основное состояние механизма или машины. Например, можно выделить такты движения и такты покоя исполнительных звеньев, такты впуска, сжатия, расширения рабочей смеси и выпуска отработанных газов в четырехтактном карбюраторном двигателем внутреннего сгорания (ДВС), такт продувки и сжатия и такт рабочего хода и выпуска в двухтактном дизеле. В течение такта движения состояние ни од-
141
ного из исполнительных механизмов и устройств не изменяется, т.е. состояние движения звеньев либо сохраняется, либо отсутствует.
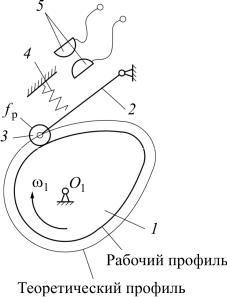
Поверхность кулачка, с которой взаимодействует толкатель, называется ра-
бочим профилем кулачка (действитель-
ным). Поверхность, проходящая через точку В и отстоящая от действительного профиля на расстоянии радиуса ролика, –
теоретический профиль (рис. 6.5).
Схему согласованности перемещений исполнительных органов в зависимости от их положений называют тактограммой. Например, на циклограмме или тактограмме кулачкового механизма выделяют четыре основные фазы: удаления, дальнего покоя, сближения и ближнего покоя толкателя. Соответствующие фазовые углы поворота кулачкового вала обозначают φу, φд, φс, φб.
Их сумма равна цикловому углу φ1ц кулачкового механизма. Сумма углов первых трех фаз равна углу φ1р рабочего профиля на кулачке:
φ1р = φу + φд + φс.
Фазовые углы назначают на основе анализа рабочих циклов машины. Например, в двигателе внутреннего сгорания (ДВС) такты определяют по положению поршня в предельных зонах: в верхней и нижней «мертвых точках» (в.м.т. и н.м.т.). Угол поворота коленчатого вала за время одного такта равен 180°. Моменты открытия и закрытия клапанов в ДВС называют фазами газораспределения. Они обеспечиваются кулачками на распределительном валу. Впускной клапан должен открываться до прихода поршня в в.м.т., т.е. с опережением на некоторый угол α, а закрываться с некоторым запаздыванием на угол δ. Выпускной клапан открывается до прихода поршня в н.м.т., т.е. с опережением на угол γ, а закрывается с запаздыванием на угол β. Конкретные величины углов опережения и запаздывания зависят от марки двигателя.
При проектировании кулачкового механизма фазовые углы рассчитывают с учетом требуемой согласованности работы кулачкового и основного рычажного механизмов.
142

6.3. Задачи проектирования кулачковых механизмов
Установление целесообразного закона движения ведомого звена
Закон движения ведомого звена диктуется рабочим процессом машины. Например, в металлорежущих станках требуется постоянная скорость подачи рабочих органов. Постоянная скорость толкателя необходима также в текстильных и швейных машинах, где кулачки служат для направления нитки при наматывании на катушку. При медленном движении кулачка силы инерции толкателя и связанных с ним деталей настолько малы, что практически неощутимы, поэтому в этих случаях можно выбирать закон перемещения толкателя исходя из технологического процесса, не учитывая величину и характер изменения ускорения. Далее, дифференцируя график S = S(ϕ), находят закон изменения:
dS = dS f (φ). dφ dφ
В быстроходных кулачковых механизмах большое значение имеет закон изменения ускорений, так как с ускорениями толкателя связаны пропорциональные им и массе звена силы инерции. В этом случае в качестве закона движения задаются кривой изменения ускорения толкателя, выбирают ее целесообразный вид, а затем по ней находят методом графического интегрирования закон изменений скоростей и закон перемещений толкателя, являющийся исходным для определения профиля кулачка.
Профилирование кулачка
В задачу профилирования входит вычерчивание профиля кулачка. При этом пользуются методом обращенного движения. Для этого сообщают всему механизму общую скорость –ω, равную по величине и противоположную по направлению угловой скорости ω кулачка. Тогда кулачок будет неподвижным, а стойка с ведомым звеном будет совершать движение относительно кулачка. Закон движения при этом не меняется. Толкатель участвует в сложном движении: переносном вместе со стойкой и относительном около стойки. Зная положение толкателя, можно вычертить профиль кулачка. В заданиях к курсовому проекту обычно указывают:
1)тип кулачкового механизма;
2)закон движения ведомого звена;
3)максимальный ход ведомого звена;
4)фазы движения;
5)длину коромысла.
143

Следовательно, проектирование в этом случае сводится к определению основных размеров кулачкового механизма и профилированию кулачка.
6.4. Законы движения ведомых звеньев
Рассмотрим ряд законов движения ведомых звеньев. При рассмотрении законов движения вместо скорости и ускорения можно пользоваться пропорциональными им величинами первой и второй производной пути толкателя по углу поворота кулачка.
В этом нетрудно убедиться из представленных ниже выражений, так как
V = |
dS |
= |
dS |
|
dϕ |
= ω |
dS |
, |
|
|
|
|
|||||
2 |
dt dϕ dt |
1 dϕ |
|
|||||
поэтому dS = V2 . dϕ ω1
По аналогии будем иметь
а |
τ |
= |
dV |
= |
dV dϕ |
= |
d |
2S |
ω |
, |
||
2 |
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
2 |
||||
|
2 |
|
dt |
|
dϕ |
|
dt |
|
dϕ2 |
1 |
|
|
откуда |
d 2S |
= |
аτ |
||
|
|
2 |
. |
||
d |
ϕ2 |
|
|||
|
|
ω2 |
|||
|
|
|
|
1 |
|
6.4.1.Параболический закон
Вэтом законе (рис. 6.6) скорость движения толкателя на первой части хода удаления равномерно возрастает, а на второй части равномерно убывает до нуля. Ускорение на этих участках остается постоянным по величине. Силы инерции изменяют знак в середине подъема, что приводит к недостаточно спокойной работе механизма из-за возникающей вибрации. Более рациональным будет такое движение толкателя, при котором ускорение постепенно меняет знак как при подъеме, так и при опускании.
Рассмотрим построение графика перемещения и графиков первой и второй производной от перемещения по углу поворота кулачка. График перемещения строится как две сопряженные ветви парабол, вершина одной находится в начале координат, другой – в точке с координатами (φуд; hmax). Как видно из рис. 6.6, построение можно провести двумя методами.
На оси S (см. рис. 6.6, а) откладываем максимальный ход ведомого звена hmax. На оси φ углов поворота кулачка откладываем фазовый угол
144
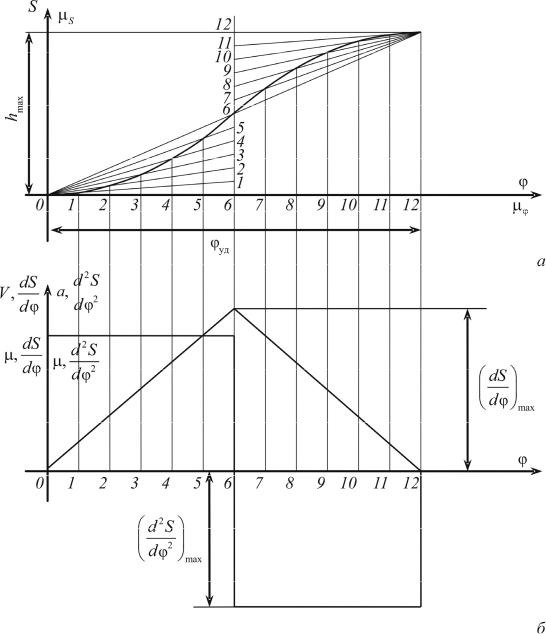
удаления. Масштабы могут быть произвольными. Из середины отрезка φуд восстановим перпендикуляр и на нем отложим hmax. Затем разделим hmax на 12 равных частей. Отрезок, соответствующий углу поворота φуд, также делим на 12 равных частей. Затем из начала координат проводим лучи через точки 1–6; из точки с координатами (φуд; hmax) проводим лучи через точки 6–12. Каждый луч, пересекаясь с одноименной ординатой, проведенной через деление отрезка соответствующего угла удаления φуд, дает точку, принадлежащую параболе.
Рис. 6.6. Параболический график движения толкателя:
а – график перемещения; б – графики аналогов скорости и ускорения
145

Таким образом, можно получить искомые точки и по ним построить обе сопряженные ветви парабол. Точка сопряжения имеет координаты ϕ2уд ; hmax2 .
Два других графика строятся методом графического дифференцирования или
аналитическим методом (см. рис. 6.6, б), причем амплитудные значения dS dϕ
и |
d 2S |
в масштабе первого графика можно найти в табл. 6.1. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
dϕ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 6 . 1 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Амплитудные значения толкателя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметр |
|
|
|
|
|
|
|
|
|
|
Закон движения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
параболический |
косинусоидальный |
|
|
синусоидальный |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
(равномерный) |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2h |
+ |
ϕ2 |
|
h |
|
|
π |
|
|
|
|
|
h |
ϕ − |
|
|
h |
sin 2πϕ |
|||||||||||||||||
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
1− cos |
|
|
ϕ |
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
ϕуд |
|
|
|
ϕ 2π ϕуд |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ϕуд |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
dS |
|
|
4h |
′ |
ϕ |
|
|
|
πh |
sin |
|
|
π |
|
|
ϕ |
|
|
|
h |
|
|
|
|
|
|
|
2π |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
− cos |
ϕ |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
dϕ |
|
|
ϕуд |
|
|
|
2ϕуд |
ϕуд |
|
|
|
|
|
|
|
|
|
|
|
|
ϕуд |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ϕуд |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
dS |
|
|
|
|
|
2h |
|
|
|
|
|
|
πh |
|
|
|
|
|
|
|
|
|
|
|
|
|
2h |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
ϕуд |
|
|
|
|
|
2ϕуд |
|
|
|
|
|
|
|
|
ϕуд |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
dϕ |
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
d 2S |
|
4h |
= const |
|
|
|
π2h |
cos |
|
π |
ϕ |
|
|
|
|
2πh sin |
2π |
ϕ |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
dϕ2 |
|
ϕ2уд |
|
|
|
|
|
|
2ϕ2уд |
ϕуд |
|
|
|
|
ϕ2уд |
|
|
|
|
ϕуд |
|
||||||||||||||||||||||
|
d 2S |
|
|
|
|
4h |
|
|
|
|
|
|
π2h |
|
|
|
|
|
|
|
2πh |
|
|||||||||||||||||||||||||
|
|
|
max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ2уд |
|
|||||||||||||||||||||||
|
dϕ2 |
|
|
|
|
ϕ2уд |
|
|
|
|
|
|
2ϕ2уд |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
Примечание: φ – текущая координата угла поворота кулачка, рад; φуд – фазовый угол удаления, рад; h – максимальное удаление толкателя или коромысла.
6.4.2. Косинусоидальный закон
Ускорение ведомого звена меняется по закону косинуса в пределах удаления и сближения. Резких переходов внутри фазы удаления и сближения нет. Однако в начале и конце фаз движения значения ускорений резко возрастают от 0 до максимального значения. Функциональная зависимость перемещения и пропорциональных величин скорости и ускорения по углу поворота кулачка приведена в табл. 6.1.
Построение графиков рассмотрим на рис. 6.7. График перемещения S = f (φ) показан на рис. 6.7, а. По оси S откладываем отрезок, соответствующий максимальному ходу ведомого звена hmаx, в масштабе μs , а по оси
φ – угол удаления в масштабе μϕ , делим его на 12 равных частей. Затем на
146

Рис. 6.7. Косинусоидальный закон движения ведомого звена:
а– график перемещения; б – график аналога скорости;
в– график аналога ускорения
147

оси S радиусом r1 = hmax/2 проводим полуокружность, которую делим также на 12 равных частей, начиная с начала координат.
Точки полуокружности проектируем на ось S и от этих проекций проводим прямые, параллельные оси φ, до пересечения их с соответствующими ординатами. Если соединить полученные точки плавной кривой, то получим график перемещения S = f (φ).
Построение графика dS/dφ = f (φ) показано на рис. 6.7, в. Из табл. 6.1 видим, что величина dS/dφ, пропорциональная скорости, выражается зави-
симостью 2πh sin 2π ϕ .
ϕ2уд ϕуд
Амплитуда синусоиды πh / 2ϕуд зависит от перемещения h, поэтому
построение графика dS/dφ = f (φ) можно выполнить автоматически в одном масштабе (μds/dϕ = μs ) графиком перемещения S = f (φ), если амплитуду вы-
разить в том же масштабе μS , что и перемещение. Построение графика
dS/dφ = f (φ) выполняем следующим образом: из начала координат радиусом, равным амплитуде синусоида r2 = πh / 2ϕуд , проводим четверть окруж-
ности, которую делим на шесть равных частей. Эти точки проектируем на ось dS/dφ и затем через них проводим прямые, параллельные оси φ до пересечения с соответствующими ординатами. Точки пересечения дают искомые точки графика. Для фазы сближения график строится аналогично.
Построение графика d 2S dϕ2 = f (ϕ) показано на рис. 6.7, б.
dϕ2 = f (ϕ) показано на рис. 6.7, б.
Масштаб построения μ |
d 2S |
возьмем равным μS. Это сделать удобно, так |
||
|
||||
|
dϕ2 |
|
|
|
как функция, определяющая d 2S dϕ2 , выражена через hmax |
(см. табл. 6.1). |
|||
Затемизначалакоординат(см. рис. 6.7, в) радиусом r = |
π2h |
, мм, проводим |
||
max |
||||
3 |
2ϕ2уд |
|
||
полуокружность и разбиваем ее на 12 равных частей. Точки деления переносим на ось d 2S dϕ2 , строим косинусоиду обычным порядком.
dϕ2 , строим косинусоиду обычным порядком.
Для фазы сближения косинусоида строится аналогично первой, но
радиус r3′ = π2hmax . 2ϕс2
Масштабы для всех графиков будут одинаковы и равны масштабу μS. Например,
r3 = π2hmax , 2ϕ2yд
где hmax – максимальное значение перемещения.
148

Величина перемещения hmax в масштабе μS будет равна hmax = Smax , то-
μS
гда r3 = π2Smax .
2μS ϕ2yд
Следовательно, величины, пропорциональные ускорению d 2S dϕ2 и скорости dS
dϕ2 и скорости dS dϕ , выраженные через отрезок h, будут изображаться также
dϕ , выраженные через отрезок h, будут изображаться также
в масштабе μS.
Для рассматриваемого закона движения толкателя характерно наличие нежестких ударов в начале и конце удаления. Наибольшее ускорение в 1,23 раза больше, чем ускорение при параболическом законе, если фазы движения ведомого звена одни и те же.
Применение этого закона движения ведомого звена допустимо при умеренных скоростях.
6.4.3. Синусоидальный закон
Ускорение изменяется по закону синуса, функциональную зависимость видно из табл. 6.1. Сопоставляя значения ускорений для всех трех законов, можно отметить, что при одинаковых параметрах Smax и φуд ускорение при синусоидальном законе на 57 % больше, чем при параболическом. Главное достоинство синусоидального закона заключается в том, что ускорения ведомого звена меняются совершенно плавно, причем при вбегании ролика на рабочий профиль ускорение начинает возрастать от нуля, и в конечной точке профиля удаления оно становится равным нулю. Соответственно характеру изменений ускорения так же плавно изменяется и сила инерции ведомого звена, вследствие чего устраняются мгновенные изменения нагрузки между роликом и кулачком.
Для клапанных механизмов этот закон имеет недостаток, так как кривая подъема слишком плавно подходит к оси φ, в результате подъем клапана затягивается, а это приводит к сжатию пара или газа (рабочей смеси).
Построение графика S = f (ϕ) показано на рис. 6.8, а. Участок удаления по оси φ делим на 12 равных частей. Из начала координат проводим по-
луокружность радиусом r = 2hπ , где h – максимальный ход ведомого звена
в масштабе μS. Эту окружность делим на шесть равных частей. Полученные точки нумеруем (см. рис. 6.8, а) и проектируем на ось S. Начало координат соединяем прямой с точкой (h; φуд). Из остальных точек проводим прямые, параллельные данной. На пересечении этих прямых с соответствующими ординатами получаем точки искомого графика.
149

Рис. 6.8. Диаграммы движения толкателя по синусоидальному закону:
а– график перемещения; б – график аналога скорости;
в– график аналога ускорения
150